中科微北斗+GPS模块经纬度数据解析详细教程-附免费代码工程
- 简介
- 准备工作
- PC端需要用到的工具
- 代码下载地址
- GD32F103C8T6最小系统板
- 代码实现
- GD32串口引脚定义如下:
- 串口的初始化
- 串口0初始化代码:
- 串口1初始化代码
- 串口的输入
- 串口0的输入代码如下:
- 串口1的输入代码如下:
- 串口打印
- 串口0的串口打印输出代码如下:
- 串口1的串口打印输出代码如下:
- GPS模块的数据解析
- 解析代码
- 主函数
- 完整的工程代码下载地址:
- 北斗+GPS定位模块的验证
- 参考
简介
北斗+GPS定位模块测试板的测试工作已完成,计划春节后开售,本文介绍GD32作为主控芯片对北斗+GPS定位模块的经纬度数据的解析方法。
准备工作
PC端需要用到的工具
- XCOM串口调试助手;
- GPS经纬度地图定位工具。
下载地址:
https://pan.baidu.com/s/1scQYIS97CqzUzH5XQ3CI6A?pwd=5u0w
代码下载地址
完整的工程代码下载地址:
https://download.csdn.net/download/YANGJIERUN/87381512
GD32F103C8T6最小系统板
使用了gd32f103c8t6最小系统开发板,某宝上搜素“Makerbase高博士GD32开发板”即可找到,只需要30多块钱,如下图。

代码实现
GD32串口引脚定义如下:
GD32F103C8T6串口引脚说明:
| 串口 | 发送管脚(TX) | 接收管脚(RX) |
|---|---|---|
| USART0 | PA9 | PA10 |
| USART1 | PA2 | PA3 |
| USART2 | PB10 | PB11 |
本例程使用USART0下载程序、Debug打印数据使用,另外使用USART1读取GPS数据。
串口的初始化
USART0、USART1的初始化步骤一致,只是函数参数上USART0改为了USART1而已。
串口0初始化代码:
// 串口 0 初始化
void USART0_init(uint32_t bound)
{
/* enable USART clock */
rcu_periph_clock_enable(RCU_USART0);
/* enable GPIO clock */
rcu_periph_clock_enable(RCU_GPIOA);
/* connect port to USARTx_Tx */
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9);
/* connect port to USARTx_Rx */
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_10);
/* USART configure */
usart_deinit(USART0);
usart_baudrate_set(USART0, bound);
usart_word_length_set(USART0, USART_WL_8BIT);
usart_stop_bit_set(USART0, USART_STB_1BIT);
usart_parity_config(USART0, USART_PM_NONE);
usart_hardware_flow_rts_config(USART0, USART_RTS_DISABLE);
usart_hardware_flow_cts_config(USART0, USART_CTS_DISABLE);
usart_receive_config(USART0, USART_RECEIVE_ENABLE);
usart_transmit_config(USART0, USART_TRANSMIT_ENABLE);
usart_enable(USART0);
}
串口1初始化代码
// 串口 1 初始化
void USART1_init(uint32_t bound)
{
/* enable USART clock */
rcu_periph_clock_enable(RCU_USART1);
/* enable GPIO clock */
rcu_periph_clock_enable(RCU_GPIOA);
/* connect port to USARTx_Tx */
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_2);
/* connect port to USARTx_Rx */
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_3);
/* USART configure */
usart_deinit(USART1);
usart_baudrate_set(USART1, bound);
usart_word_length_set(USART1, USART_WL_8BIT);
usart_stop_bit_set(USART1, USART_STB_1BIT);
usart_parity_config(USART1, USART_PM_NONE);
usart_hardware_flow_rts_config(USART1, USART_RTS_DISABLE);
usart_hardware_flow_cts_config(USART1, USART_CTS_DISABLE);
usart_receive_config(USART1, USART_RECEIVE_ENABLE);
usart_transmit_config(USART1, USART_TRANSMIT_ENABLE);
usart_enable(USART1);
}
串口的输入
串口输入本教程使用最简单的轮询输入。网上有教程是通过重写scanf实现串口输入的,但是重写scanf的实际使用很不好。数据一多就出错,而且只能被一个串口使用,本人不推荐大家使用。个人觉得还是C语言库里面的getchar()用的舒服。
串口0的输入代码如下:
//串口0的专用 getchar 函数
char USART0_getchar(void)
{
/* 等待串口输入数据 */
while (usart_flag_get(USART0, USART_FLAG_RBNE) == RESET);
return (char)usart_data_receive(USART0);
}
串口1的输入代码如下:
//串口1的专用 getchar 函数
char USART1_getchar(void)
{
/* 等待串口输入数据 */
while (usart_flag_get(USART1, USART_FLAG_RBNE) == RESET);
return (char)usart_data_receive(USART1);
}
串口打印
串口0的串口打印输出代码如下:
//串口0的专用 putchar 函数
void USART0_putchar(char ch)
{
usart_data_transmit(USART0, (uint8_t)ch);
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
}
//串口0的专用 puts 函数
void USART0_puts(char* fmt)
{
uint16_t i = 0;
while(fmt[i] != '\0')
{
USART0_putchar(fmt[i]);
i++;
}
}
串口1的串口打印输出代码如下:
//串口1的专用 putchar 函数
void USART1_putchar(char ch)
{
usart_data_transmit(USART1, (uint8_t)ch);
while(RESET == usart_flag_get(USART1, USART_FLAG_TBE));
}
//串口1的专用 puts 函数
void USART1_puts(char* fmt)
{
uint16_t i = 0;
while(fmt[i] != '\0')
{
USART1_putchar(fmt[i]);
i++;
}
}
GPS模块的数据解析
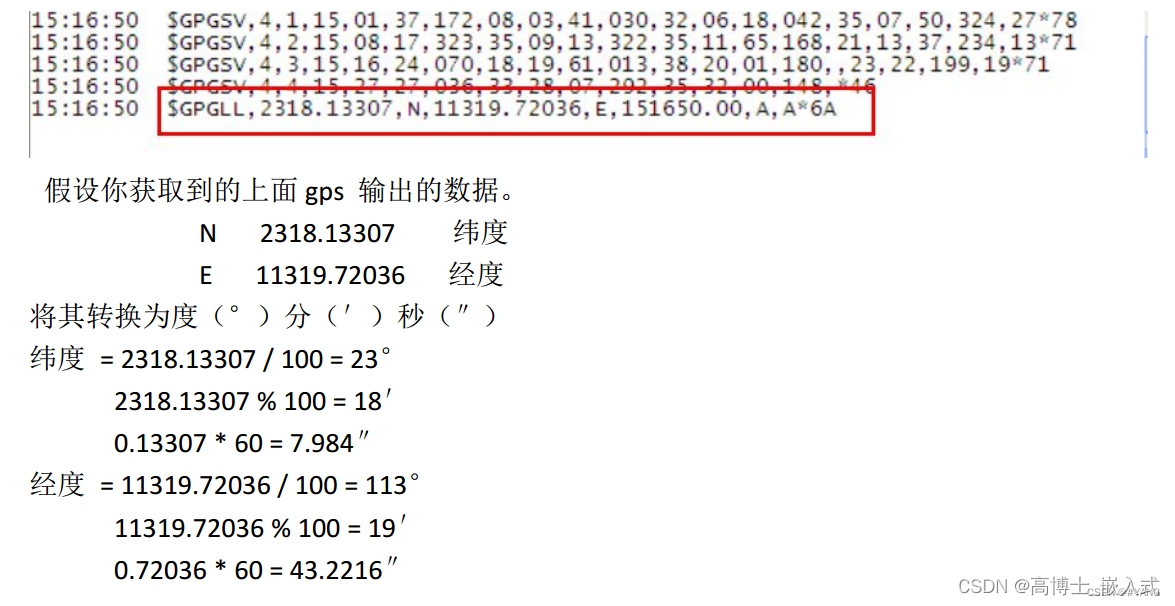
解析GPS的经纬度就是对串口上来的数据进行字符串匹配。中科微的GPS模组手册里面有其他数据解析的说明,这里只解析经纬度,其他数据的解析也是大同小异。经纬度的计算方法如下图:
解析代码
#include "DRG_GPS_Mode.h"
#define BUFF_SIZE 200
typedef struct SaveData
{
char N_S[N_S_Length]; //N/S
char E_W[E_W_Length]; //E/W
} _SaveData;
_SaveData Save_Data;
// 解析 GPS 数据
void parseGpsBuffer(void)
{
uint8_t ch,Rxbuffer[BUFF_SIZE];
uint16_t index,i;
while(1)
{
ch = USART1_getchar();
if(ch == '$')
{
index = 0;
while(ch != ',')
{
ch = USART1_getchar();
Rxbuffer[index] = ch;
index++;
}
if(!strcmp("GNGLL,",(const char*)Rxbuffer))
{
for(i = 0;i < 10;i++)
Save_Data.N_S[i] = USART1_getchar();
ch = USART1_getchar();
ch = USART1_getchar();
ch = USART1_getchar();
for(i = 0;i < 10;i++)
Save_Data.E_W[i] = USART1_getchar();
break;
}
}
}
/*
USART0_puts("Save_Data.N_S = ");
USART0_puts(Save_Data.N_S);
USART0_puts("\r\n");
USART0_puts("Save_Data.E_W = ");
USART0_puts(Save_Data.E_W);
USART0_puts("\r\n");
*/
}
// 获取 GPS 纬度数据 - 字符串形式
char* Get_Gps_N_S_str(void)
{
return Save_Data.N_S;
}
// 获取 GPS 经度数据 - 字符串形式
char* Get_Gps_E_W_str(void)
{
return Save_Data.E_W;
}
主函数
#include "DRG_GPS_Mode.h"
int main(void)
{
USART0_init(115200U);
USART1_init(9600U);
USART0_puts("USART0 begin...\r\n");
USART1_puts("USART1 begin...\r\n");
while(1)
{
parseGpsBuffer(); // 解析串口 1 上 GPS 模块的数据
USART0_puts("N_S = ");
USART0_puts(Get_Gps_N_S_str()); // 打印维度字符串数据
USART0_puts("\r\n");
USART0_puts("E_W = ");
USART0_puts(Get_Gps_E_W_str()); // 打印经度字符串数据
USART0_puts("\r\n");
}
}
完整的工程代码下载地址:
https://download.csdn.net/download/YANGJIERUN/87381512
北斗+GPS定位模块的验证
串口助手读取到的数据:
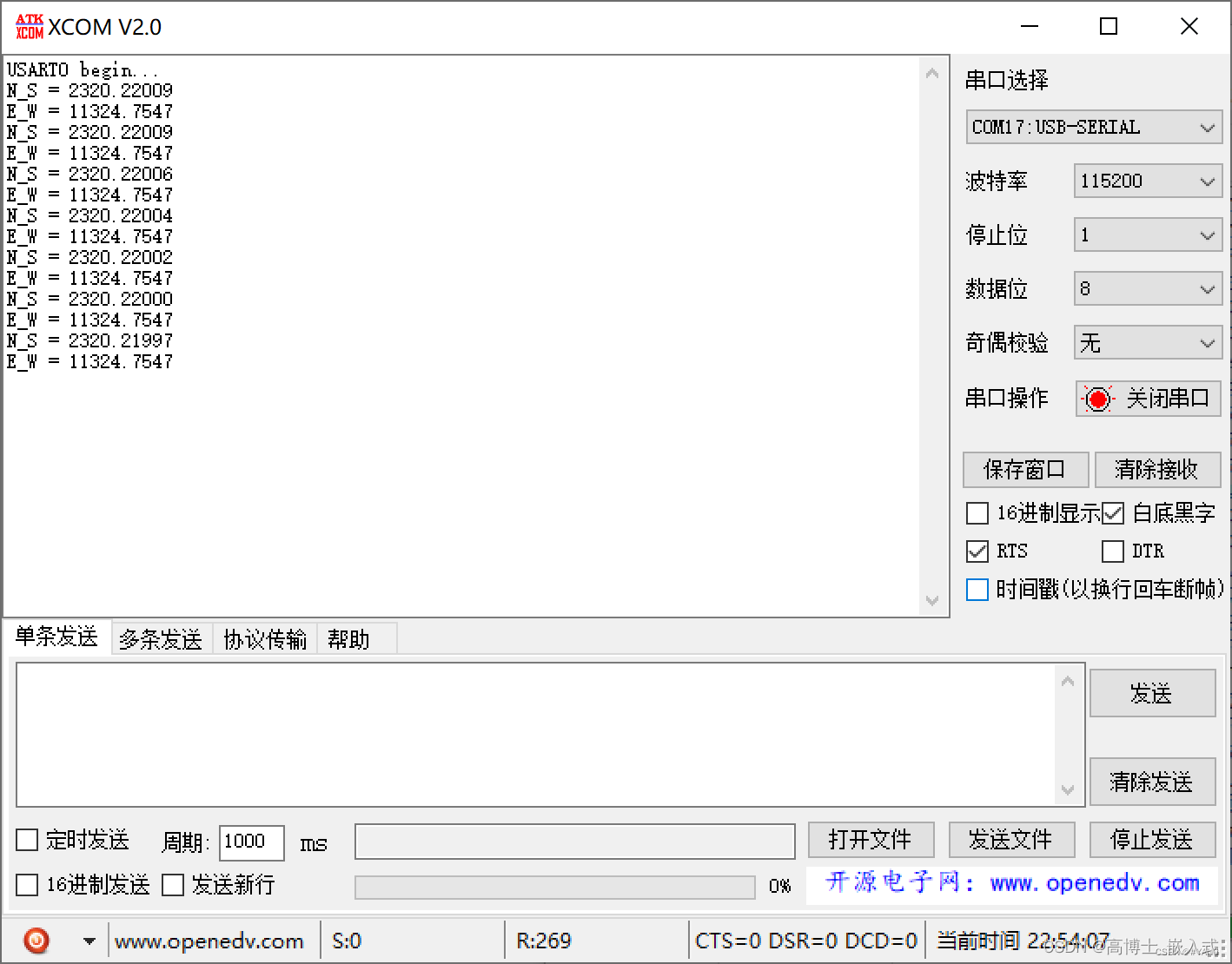
使用定位工具可以判断读取的数据是否准确。注意GPS模块要拿到室外定位,这样数据才准确。

参考
https://blog.csdn.net/YANGJIERUN/article/details/128667480