def __init__(
self,
in_channels: int,
out_channels: int,
kernel_size: _size_2_t,
stride: _size_2_t = 1,
padding: _size_2_t = 0,
dilation: _size_2_t = 1,
groups: int = 1,
bias: bool = True,
padding_mode: str = 'zeros' # TODO: refine this type
):
in_channels:网络输入的通道数。
out_channels:网络输出的通道数。
kernel_size:卷积核的大小,如果该参数是一个整数q,那么卷积核的大小是qXq。
stride:步长。是卷积过程中移动的步长。默认情况下是1。一般卷积核在输入图像上的移动是自左至右,自上至下。如果参数是一个整数那么就默认在水平和垂直方向都是该整数。如果参数是stride=(2, 1),2代表着高(h)进行步长为2,1代表着宽(w)进行步长为1。
padding:填充,默认是0填充。
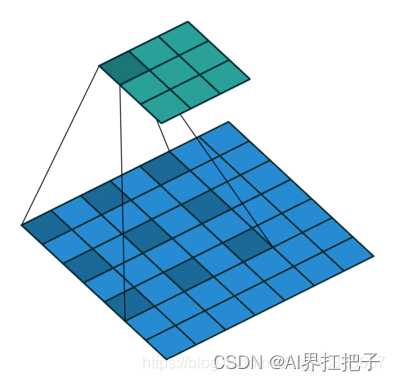
dilation:扩张。一般情况下,卷积核与输入图像对应的位置之间的计算是相同尺寸的,也就是说卷积核的大小是3X3,那么它在输入图像上每次作用的区域是3X3,这种情况下dilation=0。当dilation=1时,表示的是下图这种情况。
groups:分组。指的是对输入通道进行分组,如果groups=1,那么输入就一组,输出也为一组。如果groups=2,那么就将输入分为两组,那么相应的输出也是两组。另外需要注意的是in_channels和out_channels必须能整除groups。
bias:偏置参数,该参数是一个bool类型的,当bias=True时,表示在后向反馈中学习到的参数b被应用。
padding_mode:填充模式, padding_mode=‘zeros’表示的是0填充
。
二、通过调整参数来感受这些参数
1、结果1
import torch
import torch.nn as nn
# 输入是一个N=20,C=16,H=50,W=100的向量
m = nn.Conv2d(16, 33, 3, stride=2)
input = torch.randn(20, 16, 50, 100)
output = m(input)
print(output.size())
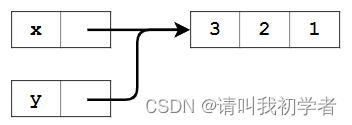
一张图片 X,其大小为 X.shape = [N, C, H, W], 其中 N 表示batch size;C表示 feature maps 的数量,又称之为通道数;H 表示图片的高度,W表示图片的宽度
在nn.Conv2d()中第一个参数要和输入的通道数相同(16)。在nn.Conv2d()中第二个参数表示输出的通道数。输出中N=20不变,C=33。通过3X3的卷积核、步长为2,50X100的输入变成了24X49。
torch.Size([20, 33, 24, 49])





![[leetcode.29]两数相除,位运算虽好,不要满眼是她](https://img-blog.csdnimg.cn/fcea493452824a338527b027965da147.png)