1、TCS的基本原理
TCS 的原理建立在驱动轮最优滑转率基础之上。理论研究证明,轮胎与路面之间的纵向附着特性决定汽车的加速和制动能力,轮胎滑动率与路面附着之间存在一定的关系,驱动轮的滑动率
λ
\lambda
λ 可以表示如下:
λ
=
{
u
−
ω
R
1
u
(
u
>
ω
R
1
,
u
≠
0
)
,
制动情况,滑移率
ω
R
1
−
u
ω
R
1
(
u
<
ω
R
1
,
ω
≠
0
)
,
驱动情况,滑移率
\lambda= \begin{cases} \dfrac{u-\omega R_1}{u}\quad(u>\omega R_1,u\neq0),制动情况,滑移率\\[2ex] \dfrac{\omega R_1-u}{\omega R_1}\quad(u<\omega R_1,\omega\neq0),驱动情况,滑移率 \end{cases}
λ=⎩
⎨
⎧uu−ωR1(u>ωR1,u=0),制动情况,滑移率ωR1ωR1−u(u<ωR1,ω=0),驱动情况,滑移率
由图可知,纵、横向附着系数是随车轮滑动率变化的,在滑动率为15%~35%时二者都处于较高水平,把汽车驱动时处在这一区域时的车轮滑转率称作最优滑转率。汽车牵引力控制系统(TCS)是通过控制驱动车轮的滑转率,使其保持在最优滑转率附近的稳定区域以充分利用路面的最大附着,防止驱动轮打滑或者侧滑失稳现象发生,从而使车辆在加速、转向、爬坡时获得最大的牵引力和操纵稳定能力。
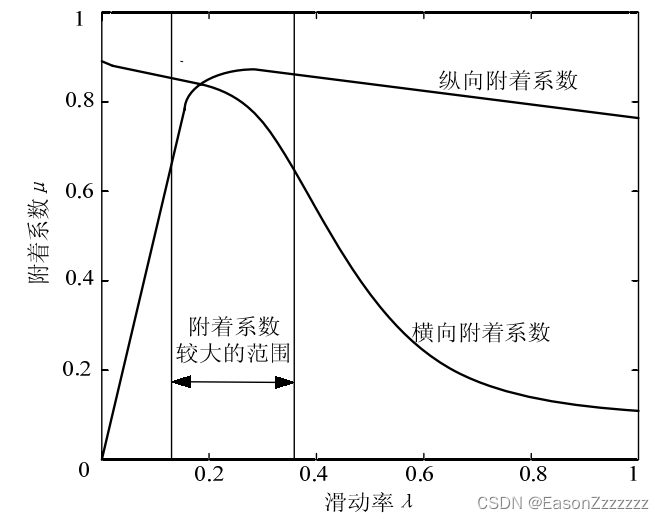
驱动轮打滑是由于发动机提供给车轮的驱动力超过路面附着所能够提供的摩擦力极限而造成的。当汽车在泥沙、冰雪等低附着路面起步时,由于轮胎与路面附着系数很低,驱动轮极易发生过度滑转。根据附着特性曲线,较高的车轮滑转率会导致轮胎与路面间的纵向力以及横向力降低,影响汽车的起步加速能力和横向稳定性,此时车辆容易发生驱动侧滑失稳现象。TCS主要作用在轮胎附着特性曲线的非线性区域,通过采用合适的控制算法将驱动车轮的滑转率维持在最佳范围内,从而提高了车辆的动力性能和驱动稳定能力。
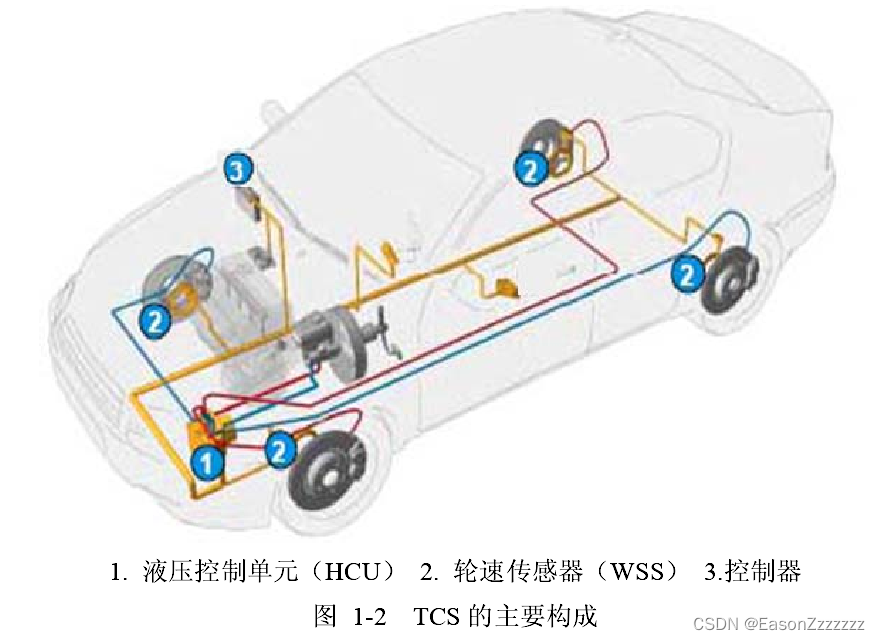
2、TCS的构成
TCS作为ESP系统的一部分,其组成主要包括液压控制单元,轮速传感器,能与发动机管理系统通讯的控制器等,其在汽车上的位置布局如图所示。
3、TCS的控制方法概述
3.1、逻辑门限值控制方法
由于逻辑门限值方法具有很强的控制收敛特性以及算法简单易操作的特点,因此该方法在工程领域得到了广泛的应用。
其基本原理是采用驱动轮的加速度和滑转率作为控制门限,控制逻辑要考虑到所有可能遇到的工况,当加速度或者滑转率超过设定的门限时才进行TCS干预,最终能使车轮的滑转率在最优滑转率附近波动,以获得最大的车轮纵向力和侧向力。
该方法虽然不需建立精确的数学模型,但是控制逻辑设计非常复杂,并且需要进行大量的匹配试验来调整出一组最优的门限值,开发周期一般较长。
3.2、PID控制方法
PID控制也是当前工程中应用较多的方法。该方法也无需了解系统详细的数学模型,只需将实际值与目标值之间的偏差作为系统的输入量,通过调整合适的PID参数,来获得系统的发动机最优转矩和主动制动压力。
由于汽车是个复杂的非线性系统,经常工作在复杂的路面条件下,应用PID控制往往会出现系统鲁棒性较差的缺点,并且不同的路面条件下其控制参数需要进行相应的调整以获得最佳的目标值。因此在应用PID控制时,往往需要考虑一些外加条件对PID参数进行自适应的修正或者与其他的控制方法结合使用。
3.3、滑模变结构控制
滑模变结构控制最大的优点就是其具有非常好的系统鲁棒性特点,并且非常适用于非线性系统。
其基本原理是先设计系统的滑模平面,该超平面设计与系统所期望的动态特性相关,然后通过设计好的滑动模态控制器使系统状态从滑模平面之外的空间向滑模平面上收敛。系统一旦到达该平面,控制作用将保证系统沿滑模平面到达系统原点。
滑模控制能够克服系统的不确定性,其对干扰和未建模动态具有很强的鲁棒性, 尤其是对非线性系统的控制具有良好的控制效果。滑模变结构控制系统算法简单,响应速度快,对外界噪声干扰和参数摄动具有鲁棒性,但是其缺点同样明显,就是控制过程中出现了开关函数,系统输出会出现高频抖振现象,这也就制约了其在工程实际中的应用。
随着对滑模控制的研究深入,抑制切换振颤已成为重大研究分支,这方面已取得了较大进展,提出了等效控制、趋近率控制、切换控制与模糊控制的组合模糊调整控制方法。
汽车驱动轮滑转率的控制与驾驶员输入、轮胎特性、车辆形式、路面条件和车辆的运行状态等多方面因素有关。很显然,这些因素具有明显的时变性、非线性和不确定性,这就要求采用的控制理论要尽可能与被控制系统的参数变化及外部扰动无关,具有良好的鲁棒性,而滑模变结构控制的特性满足这种要求。近年来该方法已在汽车动力学控制领域得到了广泛研究。
3.4、模糊逻辑控制方法
模糊逻辑控制方法主要是把人的主观经验数学化并引入控制过程,运用模糊数学把人工控制策略用计算机实现,以达到满意的效果。它首先将精确的数字量转换成模糊集合的隶属函数,然后根据控制器制定的模糊控制规则,进行模糊逻辑推理,得到一个模糊输出隶属函数,用恰当的方法找出一个合理的精确值作为控制量,加到执行器上实现控制。
模糊推理是人类思想表达的数学化过程,其通常包括3个重要部件:模糊规则库,包含若干模糊(if-then)规则;隶属函数库,定义模糊规则涉及的隶属函数;模糊推理机,根据模糊规则执行从输入到输出的推理过程。其中,模糊规则库是模糊推理系统的关键,模糊规则通常来源于专家经验或者专业知识。由于模糊逻辑控制的拟人特点,近些年在TCS的控制中也引起了广泛的研究。
3.5、总结
上述控制方法都有其特点。但是对于汽车这样复杂的系统来说,很难通过一种控制算法就能解决所有的问题。因此,在实际应用中,往往需要将多种算法结合使用,例如将PID控制和逻辑门限结合使用,效果会比单独应用一种控制方法好。