一、思路转变
A为对称正定矩阵, A x = b Ax = b Ax=b
求解向量 x x x这个问题可以转化为一个求 f ( x ) f(x) f(x)极小值点的问题,为什么可以这样:
f ( x ) = 1 2 x T A x − x T b + c f(x) = \frac{1}{2}x^TAx - x^Tb + c f(x)=21xTAx−xTb+c
可以发现:
∇ f = g r a d f = A x − b \nabla f = \mathrm{grad}f = Ax - b ∇f=gradf=Ax−b
由 A A A的正定性可以保证 f ( x ) f(x) f(x)的驻点一定是极小值点。而 A x − b = 0 Ax - b = 0 Ax−b=0得到的就是 f ( x ) f(x) f(x)的驻点,即:
f ( x ∗ ) = min f ( x ) ⇔ ∇ f ( x ∗ ) = A x ∗ − b = 0 f(x^{*}) = \min f(x) \quad \Leftrightarrow \quad \nabla f(x^{*}) = Ax^{*} - b = 0 f(x∗)=minf(x)⇔∇f(x∗)=Ax∗−b=0
把解线性方程组的问题,转化为求函数 f ( x ) f(x) f(x)的极小值点。
二、最速下降法
怎么找到这个极小值点?
已知一个多元函数沿其负梯度方向函数值下降得最快。
一种较为形象的解释:
想象自己在半山腰上,要到山脚处:
- 首先要找好下降方向:负梯度方向
- 之后沿着选定方向直走
- 走到不能再下降为止(也就是选定方向的最低点),停下来,再找新的下降方向
- 重复上面的过程,便能到达山脚
翻译成数学语言
-
给定任意初值 x 0 x_0 x0,计算残量 r 0 = b − A x 0 r_0 = b - Ax_0 r0=b−Ax0。
-
选择 P = r 0 P = r_0 P=r0为前进方向,计算:
α = ( r 0 , r 0 ) ( A r 0 , r 0 ) , x 1 = x 0 + α r 0 \alpha = \frac{\left(r_0, r_0\right)}{\left(Ar_0, r_0\right)}, \quad x_1 = x_0 + \alpha r_0 α=(Ar0,r0)(r0,r0),x1=x0+αr0
-
重复上面的过程。
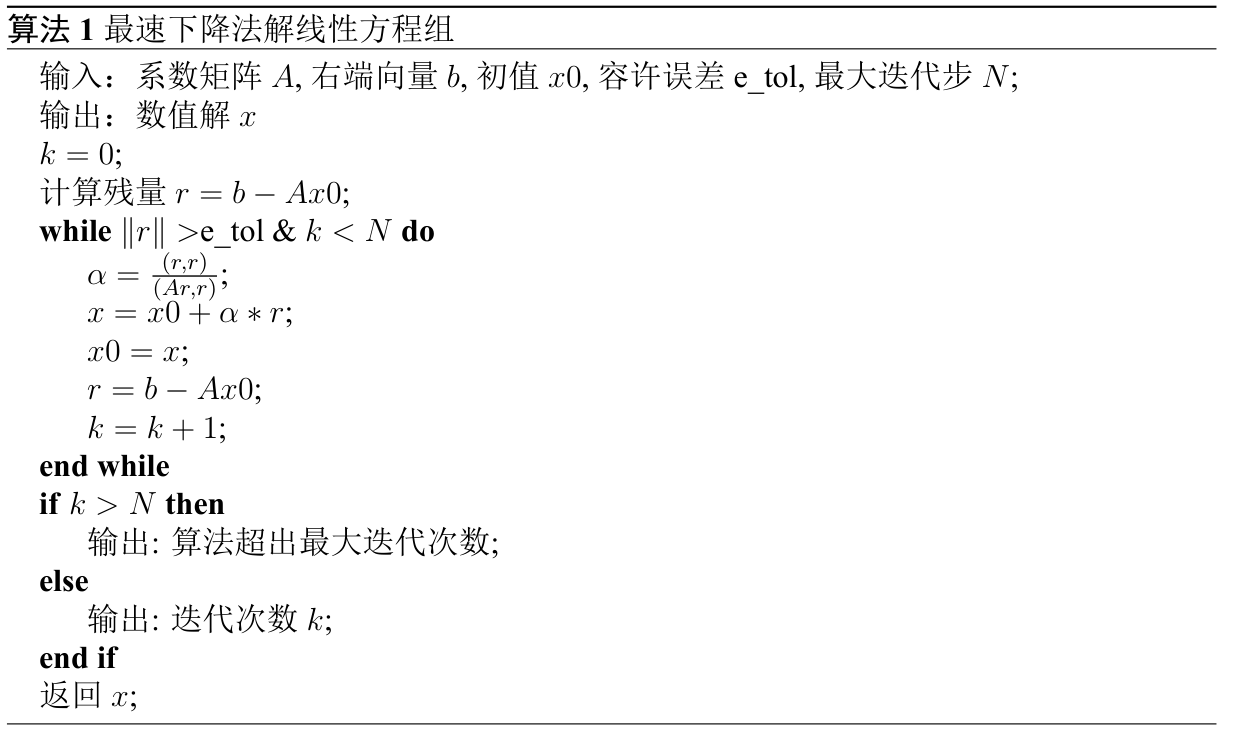
算法如下:
三、北太天元 or matlab实现
最速下降法解线性方程组
function [x,k,r] = Gradient_Descent(A,b,x0,e_tol,N)
% 最速下降法 解线性方程组
% Input: A, b(列向量), x0(初始值),e_tol: error tolerant, N: 限制迭代次数小于 N 次
% Output: x , k(迭代次数), r
% Version: 1.0
% last modified: 2024/05/19
n = length(b); k = 0;
R = zeros(1,N); % 记录残差
r = b - A*x0;
x = zeros(n,N); % 记录每次迭代结果
x(:,1) = x0;
norm_r = norm(r,2); R(1) = norm_r;
while norm_r > e_tol && k < N
alpha = r'*r/(r'*A*r); % 计算步长
x(:,k+2) = x(:,k+1) + alpha * r;
r = b - A * x(:,k+2); % 残量
norm_r = norm(r,2);
R(k+2)=norm_r;
k = k+1;
end
x = x(:,1:k+1); % 返回每次的迭代结果
r = R(1:k+1); % 返回每次的残差
if k>N
fprintf('迭代超出最大迭代次数');
else
fprintf('迭代次数=%i\n',k);
end
end
四、数值算例
下面例子中统一 $ N=100,e_tol=10^{-8},x_0 = 0 $
例1
A
x
=
b
Ax=b
Ax=b
A
=
[
4
1
0
0
1
4
1
0
0
1
4
1
0
0
1
4
]
b
=
[
6
25
−
11
15
]
A=\begin{bmatrix} 4 & 1 & 0 & 0 \\ 1 & 4 & 1 & 0 \\ 0 & 1 & 4 & 1 \\ 0 & 0 & 1 & 4 \end{bmatrix}\quad b= \begin{bmatrix} 6 \\ 25 \\ -11 \\ 15 \end{bmatrix}
A=
4100141001410014
b=
625−1115
用最速下降法求 x x x ;
实现
clc;clear all,format long;
N = 100; e_tol = 1e-8;
A = [4, 1, 0, 0;
1, 4, 1, 0;
0, 1, 4, 1;
0, 0, 1, 4];
b = [6; 25; -11; 15];
x0 = [0; 0; 0; 0];
[x11, k1, r11] = Gradient_Descent(A, b, x0, e_tol, N);
x_exact = gsem_column(A, b);
% 作图查看误差变化
n = length(b);
k1 = k1 + 1;
% 数值解
figure(1);
plot(1:k1, x11(1,:), '-*r', 1:k1, x11(2,:), '-og', 1:k1, x11(3,:), '-+b', 1:k1, x11(4,:), '-dk');
legend('x_1', 'x_2', 'x_3', 'x_4');
title('每个数值解的变化');
% 残差变化
figure(2);
plot(1:k1, r11, '-*r');
legend('残差');
title('残差变化');
运行后得到
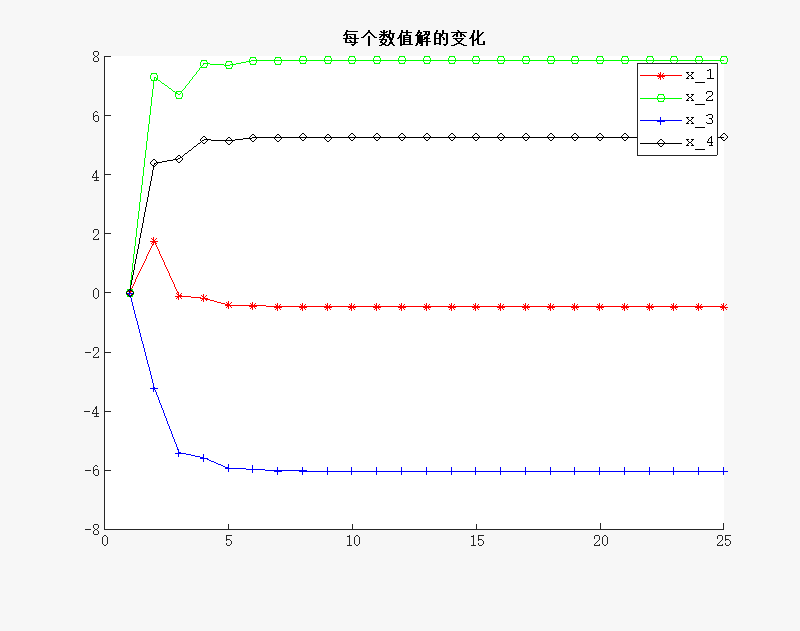
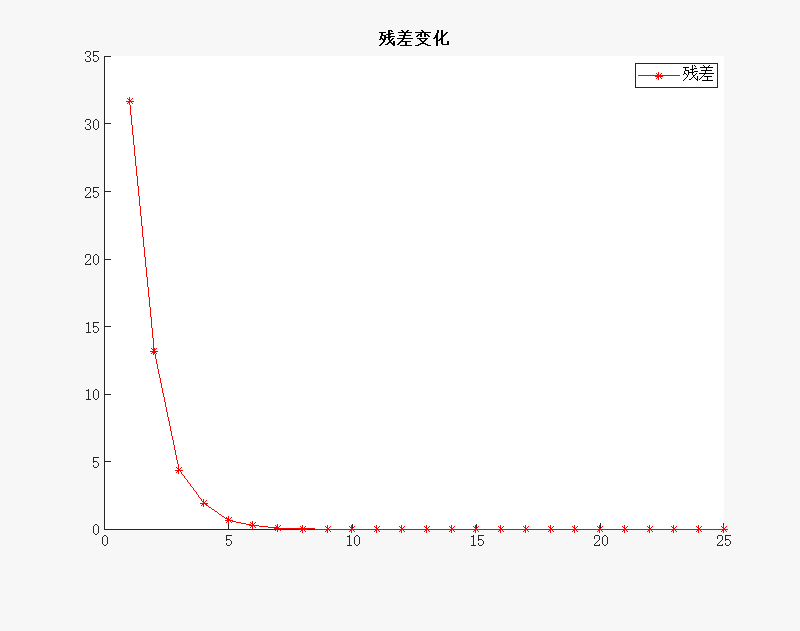
通过这个例子可以初步看到方法是可行的.
例2
下面这个例子我将形象展示最速下降法的实现特点
A = [3 1; 1 5];
b = [-1;1];
c = 0;
对应函数: f ( x , y ) = 1 2 ( 3 x 2 + 2 ⋅ 1 ⋅ x y + 5 y 2 ) − ( − x + y ) + 0 f(x,y)=\frac{1}{2}\left(3x^2+2\cdot1\cdot xy+5y^2\right)-(-x+y)+0 f(x,y)=21(3x2+2⋅1⋅xy+5y2)−(−x+y)+0
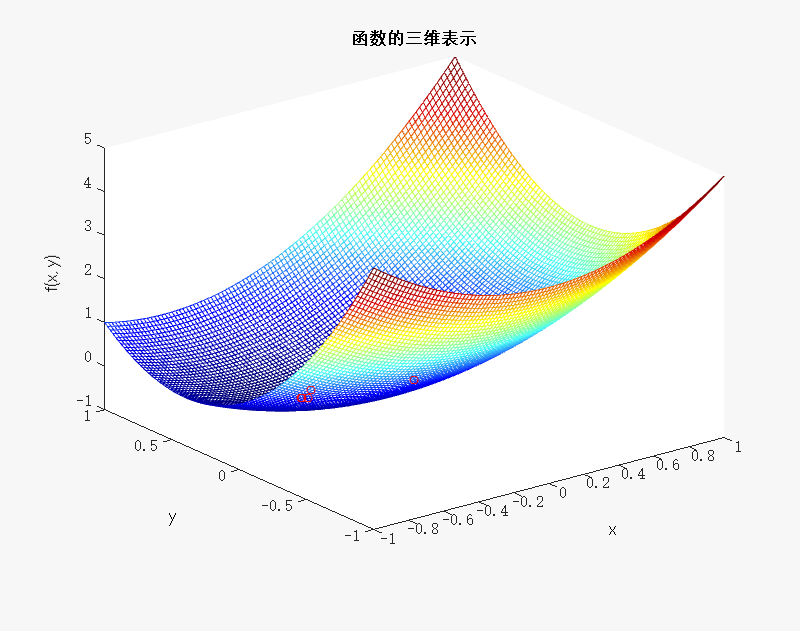
三维表示一下
clc;clear all;format long;
A = [3 1; 1 5];
b = [-1;1];
c = 0;
N = 100; e_tol = 1e-8; x0 =zeros(length(b),1);
%x0 =[-0.1;-0.1]
x = linspace(-1,1,100);
y = linspace(-1,1,100);
% 网格化、方便作图
[x, y] = meshgrid(x,y);
% 定义函数 f(x) = 0.5 * x' * A * x - x'*b + c
% 为了作图方便,如下定义
f=@(x,y) 0.5 * (A(1,1) * x.^2 + 2 * A(1,2) * x .* y + A(2,2) * y.^2) - (b(1) * x + b(2) * y) + c;
z = f(x,y);
mesh(x,y,z)
[x11,k1,r11] = Gradient_Descent(A,b,x0,e_tol,N);
figure(1)
mesh(x,y,z)
hold on
% 绘制最速下降法的每次迭代点
%scatter3(x11(1, :), x11(2, :), f(x11(1,:),x11(2,:)),'r','filled');
plot3(x11(1, :), x11(2, :), f(x11(1,:),x11(2,:)),'r-o');
xlabel('x');
ylabel('y');
zlabel('f(x, y)');
title('函数的三维表示');
hold off;
运行后得到
绘制等高线图
figure(2)
hold on
contour(x,y,z,200)
plot(x11(1, :), x11(2, :), 'r-o');
title('最速下降法特点');
colorbar;
运行后得到
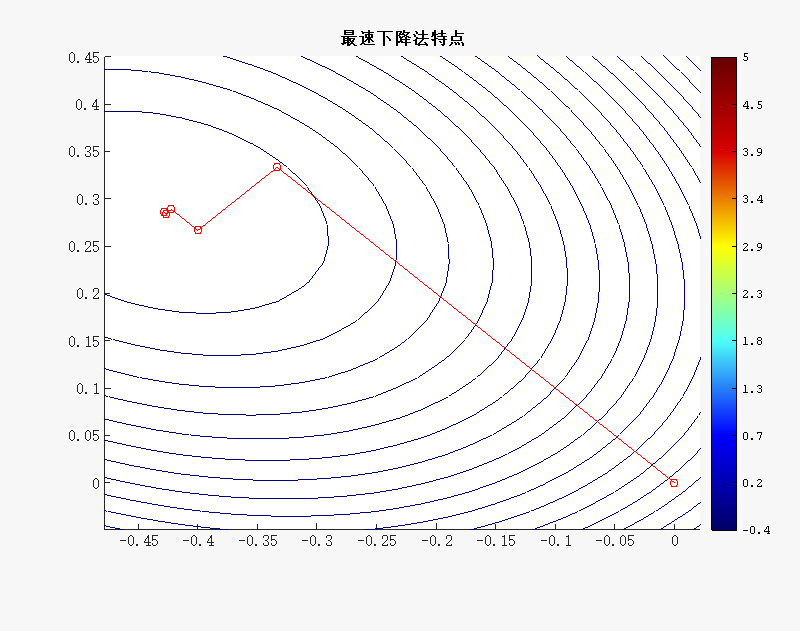
为了展示更清晰,将 $ x_0 $设为 [-0.2;0] ,可以得到这样的图像
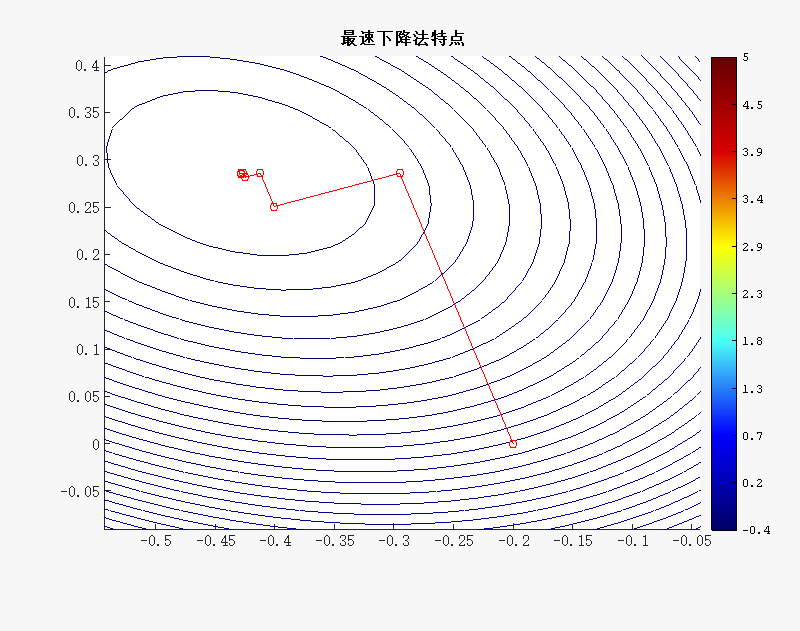
由图形可以看出,最速下降法是如何下降的.
从某一点,选定最快的下降方向,下降到不能再下降为止,再重新找新的最快的下降方向.就这样依次进行下去.
由此可以看出最速下降法的优点是容易理解和实现较为简单.
当然也可以看出它还存在很大的改进空间,在每一次选方向时,明明有着更快更好的方向(三角形任意的第三边都更快).
以上图形均在北太天元软件中绘制,matlab同样可以正常运行。