转速跟踪启动:又名顺风&&逆风启动、或者飞车启动、或者启动前转速检测。应用背景见附录。
转速跟踪 也可以理解为 对正在高速运行的电机 进行初始位置辨识。
一、转速跟踪方案
转速跟踪是电机控制中的一项关键技术,尤其在变频驱动、伺服系统等应用中,要求变频器或控制器在启动前能够准确地感知电机当前转速并实时调整输出以保持与电机转速的一致。
根据不同应用场景和电机类型,已商用方案如下所述: 零矢量角度法、零矢量频率法、零电流闭环观测法、反电势采样法、扫频法、励磁电流闭环观测法......
零矢量角度法
利用变频器输出的高频间隔的多个零矢量(即三相电压矢量合成后幅值为零的时刻)期间的电机电流直接根据旋转坐标系下的电机电压方程对电机位置进行计算,然后利用电机位置的近似微分计算出电机的运行速度。零矢量个数较少。仅用于永磁电机。
零矢量频率法
相比于零矢量角度法,该方法同样利用变频器输出的高频间隔的多个零矢量,但是是采用零矢量时间三相电流近似过零时刻来直接计算永磁电机的运行频率(与反电势频率一致)。虽然不依赖电机电压方程,但是零矢量个数可能较多(有一定制动效果),需要进行角度补偿以及延时补偿。仅用于永磁电机。
零电流闭环观测法
以矢量控制为例,将交直轴电流给定为零进行启动,利用电机电压和电机电流计算电机反电势频率和电机位置角度(可以采用磁链观测器或者反电势观测器之类的观测器即可)。仅用于永磁电机。直接转速控制时,使得转矩给定为零。
反电势采样法
若有电机输出电压采样电路,可以直接采用电机反电势电压采样信号进行电机速度和位置的计算。仅用于永磁电机。
扫频法
预设频率曲线进行扫频,以确定转差最小时的频率为电机频率,进而根据频率计算电机角度。扫描过程可能需要较长时间,对实时性要求较高的应用可能不合适。可用于感应电机。
励磁电流闭环观测法
与零电流闭环观测法类似,但是需要注意的是需要类似预励磁操作先对电机进行励磁,然后其他步骤与零电流闭环观测法一致。可用于感应电机和同步磁阻电机。
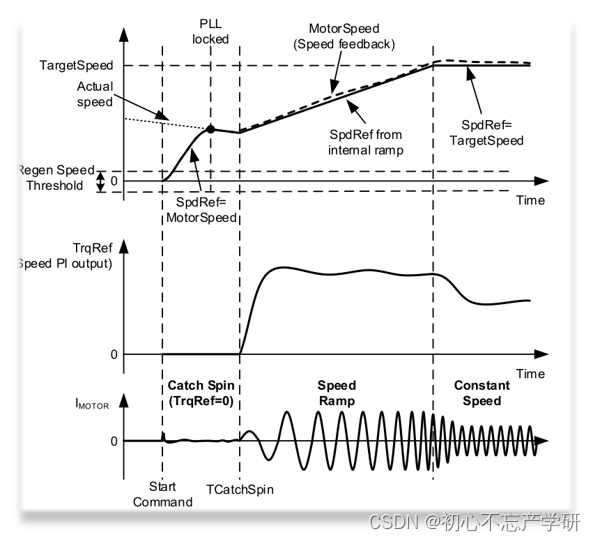
在启动之前,电机可能高速正转或者反转,下图以正转为例
二、暂留问题
转速跟踪作为电机控制领域的一项关键技术,尤其在无传感器控制(sensorless control)和高动态性能要求的应用中,面临一些技术难点。以下是一些主要的挑战:
低速与零速转速检测
在电机低速或接近零速时,反电动势(Back EMF)较小,可能被噪声、系统泄漏电流等干扰因素掩盖,导致难以准确检测到转速信号。
采用专门的低速检测技术,如锁相环(PLL)技术、高频注入法、滑模观测器等,增强对微弱反电动势信号的提取和处理能力。当前也可以在一定转速之下直接进行静态的初始位置检测(高频注入法和脉冲法等。转速较低时,可以使用静态的初始位置检测,带载要求不高的可以直接开环启动)
参数变化与非线性效应
电机参数(如电阻、电感、磁链饱和特性等)随温度、老化、负载变化而变化,且电机特性本身存在非线性,这些都影响转速观测的准确性。
采用在线参数辨识与自适应控制技术,实时更新电机模型参数;(亦然可以离线辨识和查表)
运用非线性控制理论设计控制器,以应对电机的非线性特性。
噪声干扰与信噪比问题
电机及其驱动系统的电气噪声、环境电磁干扰、测量设备本身的噪声等都可能影响转速信号的检测和处理。采用数字滤波器(如卡尔曼滤波、滑动平均滤波、小波滤波等)进行信号去噪;采用抗干扰性强的硬件设计,如改进传感器接口、增加屏蔽措施、优化布线等。
动态响应与稳定性
在快速变化的负载条件或高动态性能要求下,转速跟踪系统需要有快速的响应速度和良好的稳定性,以确保电机转速的精确跟踪。采用高性能的控制算法,如模型预测控制(MPC)、滑模控制、自抗扰控制(ADRC)等,增强系统的动态响应能力和鲁棒性;优化控制器参数,确保系统在宽广的工作范围内保持稳定。
故障诊断与容错能力
在实际运行中,可能会遇到传感器故障、系统故障、外部扰动等不确定因素,影响转速跟踪的可靠性。设计故障检测与诊断算法,实现故障的快速识别与隔离;采用冗余设计、容错控制策略,确保在部分故障条件下仍能进行有效的转速跟踪。
综上所述,转速跟踪技术的难点主要集中在低速与零速检测、参数变化与非线性效应处理、噪声干扰抑制、动态响应与稳定性提升,以及故障诊断与容错能力等方面。克服这些难点往往需要结合先进的控制理论、信号处理技术、故障诊断策略以及针对性的硬件设计。
附录:功能介绍
变频器的“飞车转速跟踪”或“飞车启动”功能是一项专为已处于旋转状态的电动机设计的特殊启动模式。在某些特定应用场景下,电机由于外力或者其他动力源的作用,其转子可能在变频器接入之前就已经处于高速旋转状态。飞车转速跟踪功能允许变频器在这种情况下安全、高效地接管电机控制,确保电机以现有转速平稳过渡到变频器控制下的运行状态,而不引起过大的冲击、振动或电气应力。以下是该功能的概述:
功能目标
-
平滑接管:避免电机在变频器接入瞬间因转速不匹配造成的剧烈冲击,保护电机、负载和传动机构免受损伤。
-
节能与效率:在某些连续生产流程中,如长皮带输送机、大型风机等,电机可能由于意外断电后再恢复供电或由其他备用驱动系统暂时带动而处于旋转状态。飞车启动功能可迅速恢复电机至变频器控制,减少因制动、停止后再重启带来的能量损失和时间延误。
-
应急处理:在故障恢复或维护后,电机可能由于风力、惯性、重力等原因保持转动。飞车启动功能使得变频器能够迅速、安全地接手电机控制,避免手动干预或使用复杂的安全措施。
实现原理
-
转速检测与估算:变频器必须能够准确地检测或估算电机的实际转速。这可能通过内置或外置的速度传感器直接测量,或者在无传感器方案中采用算法(如高频注入法、反电动势法、模型参考自适应等)间接推算。
-
转速跟踪控制:变频器根据检测到的转速,迅速调整自身的输出频率,使之与电机当前转速相匹配。这通常涉及到先进的控制算法,如矢量控制、直接转矩控制等,确保在转速跟踪过程中保持良好的动态性能和转矩控制精度。
-
转矩控制策略:在跟踪过程中,变频器需合理控制电机转矩,既要避免过大的启动转矩造成冲击,又要保证有足够的转矩维持电机稳定旋转。这可能包括软启动、转矩限制、滑差补偿等功能。
-
保护机制:为防止电机过速、失步、过电流等异常情况,飞车启动功能应配备相应的保护措施,如转速超限保护、失步检测与恢复、过流保护等,确保启动过程的安全性。
实施步骤
-
电机状态确认:确认电机在变频器接入前已处于旋转状态,了解其大致转速和旋转方向。
-
变频器设置:在变频器参数设置中启用飞车启动功能,可能需要设定初始转速值、跟踪速率、转矩限制等参数。
-
安全检查:确保电机及负载系统具备接受飞车启动的条件,如有必要,进行必要的机械锁定解除、电气隔离确认等工作。
-
启动操作:按照规定的操作程序,启动变频器,使其进入飞车转速跟踪模式。变频器将自动检测或估算电机转速,并逐步调整输出频率以匹配电机实际转速。
-
监控与调整:在启动过程中密切监视电机运行状态、变频器输出参数及系统反馈,如有异常应及时调整参数或采取相应措施。
变频器的飞车转速跟踪功能是针对电机已处于旋转状态时安全、高效启动的重要手段。它融合了转速检测、先进控制算法、转矩控制策略和保护机制,旨在确保电机在变频器接管时平滑过渡,减少冲击、保护设备,同时节省能源、提高生产效率。在特定工业应用中,这一功能对于维持连续生产流程、应对突发状况以及执行高效维护操作具有重要意义。