目录
概述
1 输入捕获模式
1.1 原理介绍
1.2 实现步骤
1.3 发生输入捕获流程
2 使用STM32Cube配置工程
2.1 软件环境
2.2 配置参数
2.3 生成项目文件
3 功能实现
3.1 PWM调制占空比函数
3.2 应用函数库
4 测试
4.1 功能框图
4.2 运行结果
源代码下载地址:
stm32-f103-rct6-输入捕获测试代码资源-CSDN文库
概述
本文主要介绍STM32高级定时器的用法至输入捕获功能,该功能可用于捕捉外部输入信号的频率。笔者通过详细的案例介绍这个功能,包括理论知识,实现原理,以及如何使用STM32Cube配置基本的参数,编写实用代码,实现捕捉频率当的功能。
1 输入捕获模式
1.1 原理介绍
在输入捕获模式下,捕获/比较寄存器(TIMx_CCRx)用于锁存在由相应的ICx信号检测到的转变之后的计数器的值。当发生捕获,相应的CCXIF标志(TIMx_SR寄存器)被设置,并且中断或
如果它们被启用,则可以发送DMA请求。如果在CCxIF标志为则过捕获标志CCxOF(TIMx_SR寄存器)被设置。CCxIF可以是软件通过将其写入“0”或读取存储在中的捕获数据来清除TIMx_CCRx寄存器。CCxOF在写入“0”时被清除。
1.2 实现步骤
以下示例显示如何在TI1时捕获TIMx_CCR1中的计数器值投入增加。要执行此操作,请使用以下步骤:
1) 选择激活输入:TIMx_CCR1必须连接到TI1输入,因此写入CC1S位到TIMx_ CCMR1寄存器中的01。一旦CC1S变得与00不同,通道被配置在输入端并且TIMx_ CCR1寄存器变为只读。
2) 针对连接到的信号编程所需的输入滤波器持续时间定时器(如果输入是TIx输入,则通过在TIMx_CCMRx寄存器中编程ICxF位)。让我们想象一下,当切换时,输入信号在at must five期间不稳定内部时钟周期。我们必须编程一个比这五个时钟更长的滤波器持续时间循环。当8个连续样本具有新的已经检测到电平(以fDTS频率采样)。然后将IC1F位写入中的0011
CCMR1寄存器。3) 通过将CC1P位写入0,选择TI1通道上活动转换的边缘CCER寄存器(在这种情况下为上升沿)。
4) 对输入预分频器进行编程。在我们的示例中,我们希望捕获在每个有效转换,因此预分频器被禁用(将IC1PS位写入TIMx_CCMR1寄存器)
5 ) 通过在中设置CC1E位,启用从计数器到捕获寄存器的捕获TIMx_CCER寄存器。
6 ) 如果需要,通过在中设置CC1IE位来启用相关的中断请求TIMx_DIER寄存器和/或DMA请求,通过在TIMx_DIER寄存器。
1.3 发生输入捕获流程
为了处理过度捕获,建议在过度捕获标志。这是为了避免错过阅读后可能发生的过度捕获
标志和读取数据之前。
1) TIMx_CCR1寄存器在激活转换时获取计数器的值。
2)CC1IF标志被设置(中断标志)。如果至少有两次连续捕获,也会设置CC1OF发生,而标志未被清除。
3)根据CC1IE位生成中断
4)根据CC1DE位生成DMA请求
注意问题:
IC中断和/或DMA请求可以由软件通过设置EGR寄存器中相应的CCxG位。
2 使用STM32Cube配置工程
2.1 软件环境
| 软件名称 | 版本信息 |
|---|---|
| STM32Cube | STM32CubeMX 6.11 |
| STM32 HAL | STM32Cube_FW_F1_V1.8.5 |
2.2 配置参数
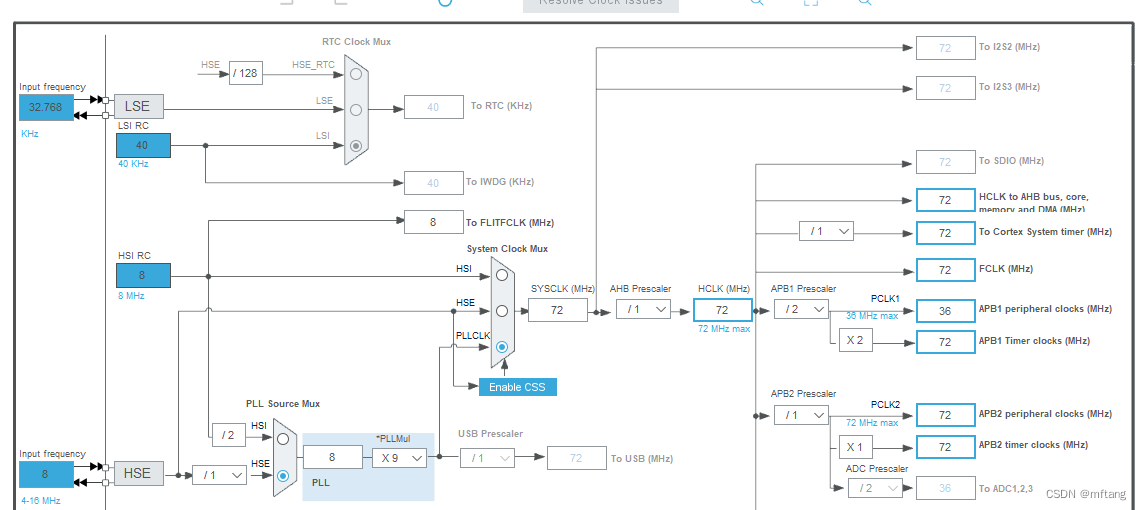
1)配置系统时钟:72M Hz,Timer的工作时钟为72M Hz
2) 使用定时器1配置输入捕获功能
 其对应的IO口配置
其对应的IO口配置
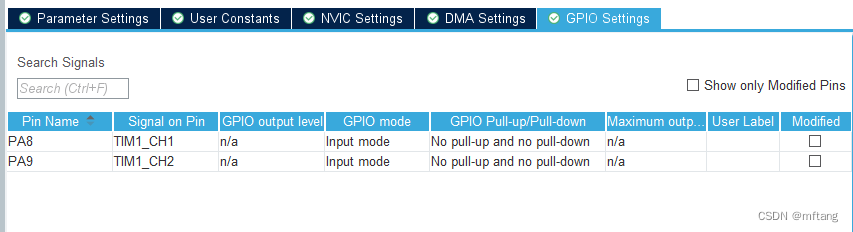
计数器时钟参数和捕获通道参数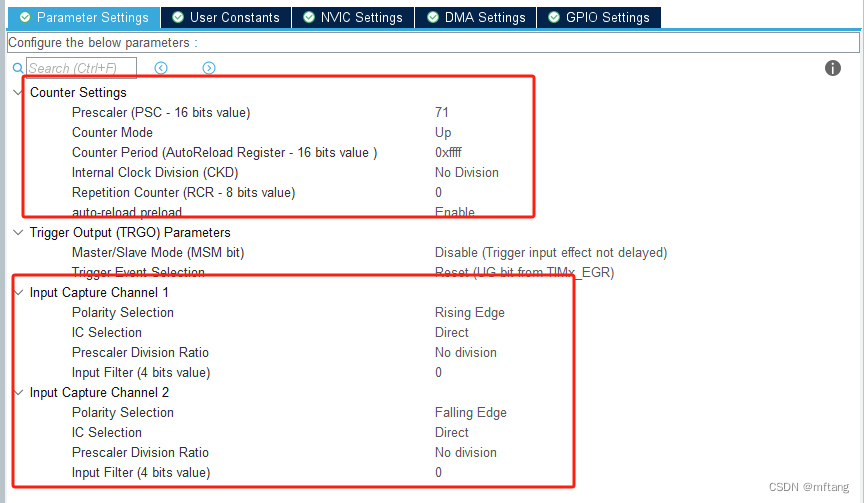
3)配置PWM相关参数
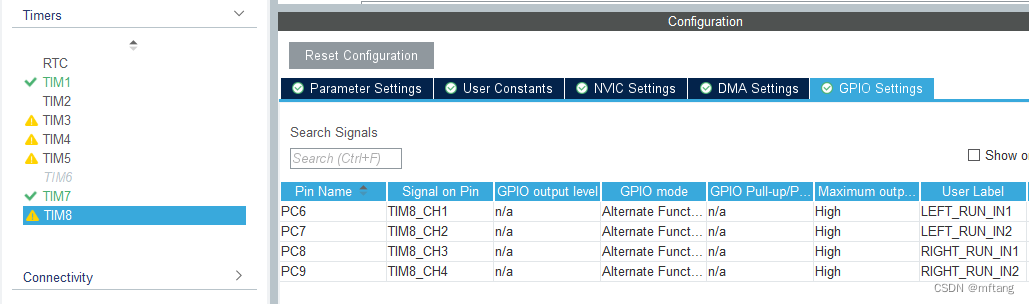
选择定时器8作为控制PWM的输出

PWM波对应的IO接口
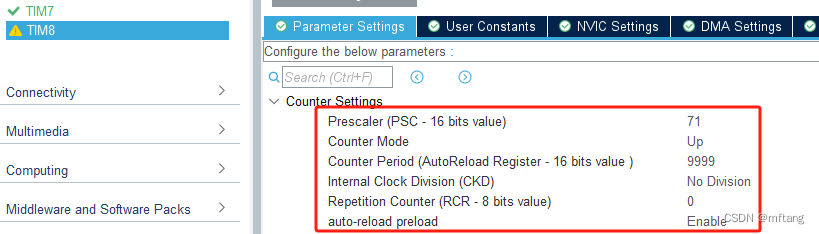
 Timer-8定时器相关参数
Timer-8定时器相关参数
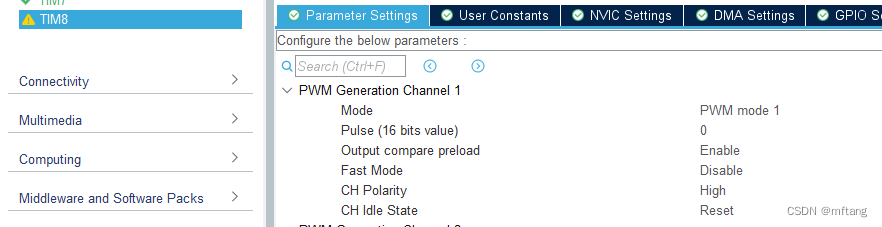
和PWM相关的参数配置
2.3 生成项目文件
使用STM32FCube完成项目配置后,就可以生成工程文件。生成代码如下:

3 功能实现
3.1 PWM调制占空比函数
在tim.c中实现一个函数,其用于实现调制PWM的占空比。函数原型如下:
void HAL_TIM_SetPWM_Pulse( uint32_t Pulse, uint32_t Channel)
{
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = Pulse;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim8, &sConfigOC, Channel) != HAL_OK)
{
Error_Handler();
}
}3.2 应用函数库
创建App/product目录,实现应用函数。
1)pwm_ctrl.c 实现pwm的功能控制
2)input_capture.c 实现捕捉功能
1) 在 pwm_ctrl.c文件中配置PWM的占空比
void pwm_ctrl_Init( void )
{
HAL_TIM_Base_Start( &htim8 );
HAL_TIM_PWM_Start( &htim8, TIM_CHANNEL_1); // PC6
HAL_TIM_PWM_Start( &htim8, TIM_CHANNEL_2); // PC7
HAL_TIM_SetPWM_Pulse( 500, TIM_CHANNEL_1);
HAL_TIM_SetPWM_Pulse( 500, TIM_CHANNEL_2);
}
2)input_capture.c 实现捕捉功能
初始化捕捉功能参数:
static void set_captureMode( uint32_t Channel, uint32_t ICPolarity )
{
TIM_IC_InitTypeDef sConfigIC = {0};
if(HAL_TIM_IC_Stop_IT(&htim1, Channel) != HAL_OK)
{
/* Starting Error */
Error_Handler();
}
sConfigIC.ICPolarity = ICPolarity;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim1, &sConfigIC, Channel) != HAL_OK)
{
Error_Handler();
}
if(HAL_TIM_IC_Start_IT(&htim1, Channel) != HAL_OK)
{
/* Starting Error */
Error_Handler();
}
}3)捕捉功能回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
uint32_t uwIC2Value0;
static uint32_t uwIC2Value2_list[2];
static uint8_t count = 0;
if(htim->Instance == TIM1)
{
if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
/* Get the 1st Input Capture value */
uwIC2Value0 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
uwIC2Value2_list[count] = uwIC2Value0;
count++;
if( count == 2 ){
count = 0;
if( uwIC2Value2_list[1] > uwIC2Value2_list[0])
printf(" cycle = %d us\r\n", uwIC2Value2_list[1]- uwIC2Value2_list[0]);
}
}
}
}4 测试
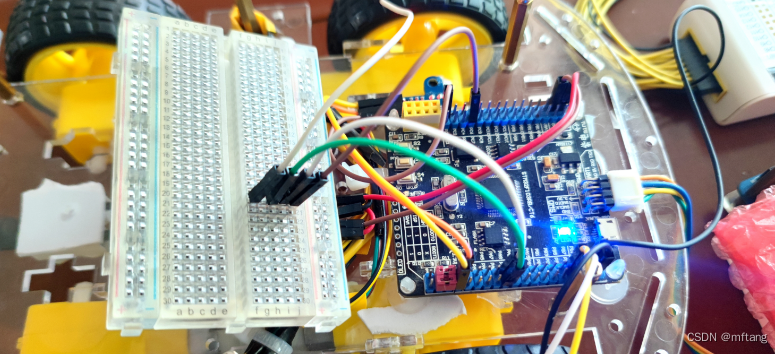
4.1 功能框图

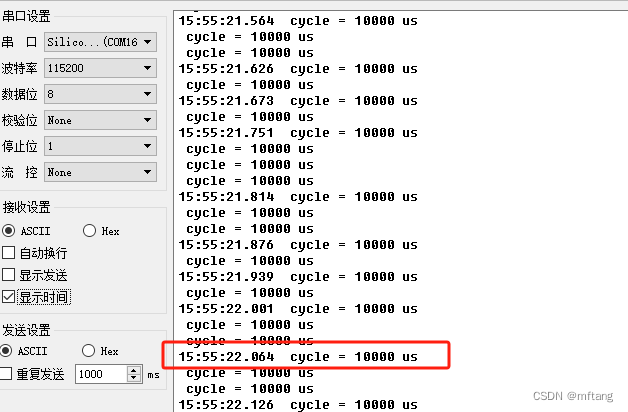
4.2 运行结果
1)使用逻辑分析仪测试,PWM的周期为10ms
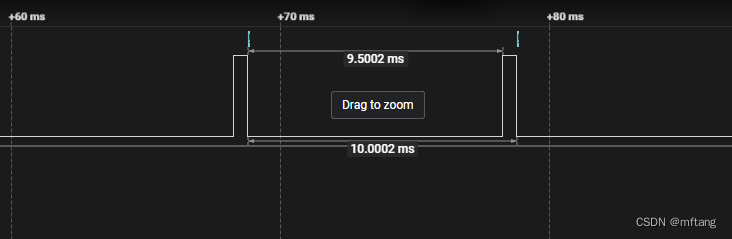
2)使用捕捉功能测试的数据为: 10000us = 10ms