1. 关注一个序列
做RNN的时候,处理不了太长的序列,因为把整个序列信息全部放在隐藏状态中,所有东西都放进去,当时间步很长的话,隐藏状态就会累积太多东西,就可能对很前面的信息不那么容易抽取出来了。
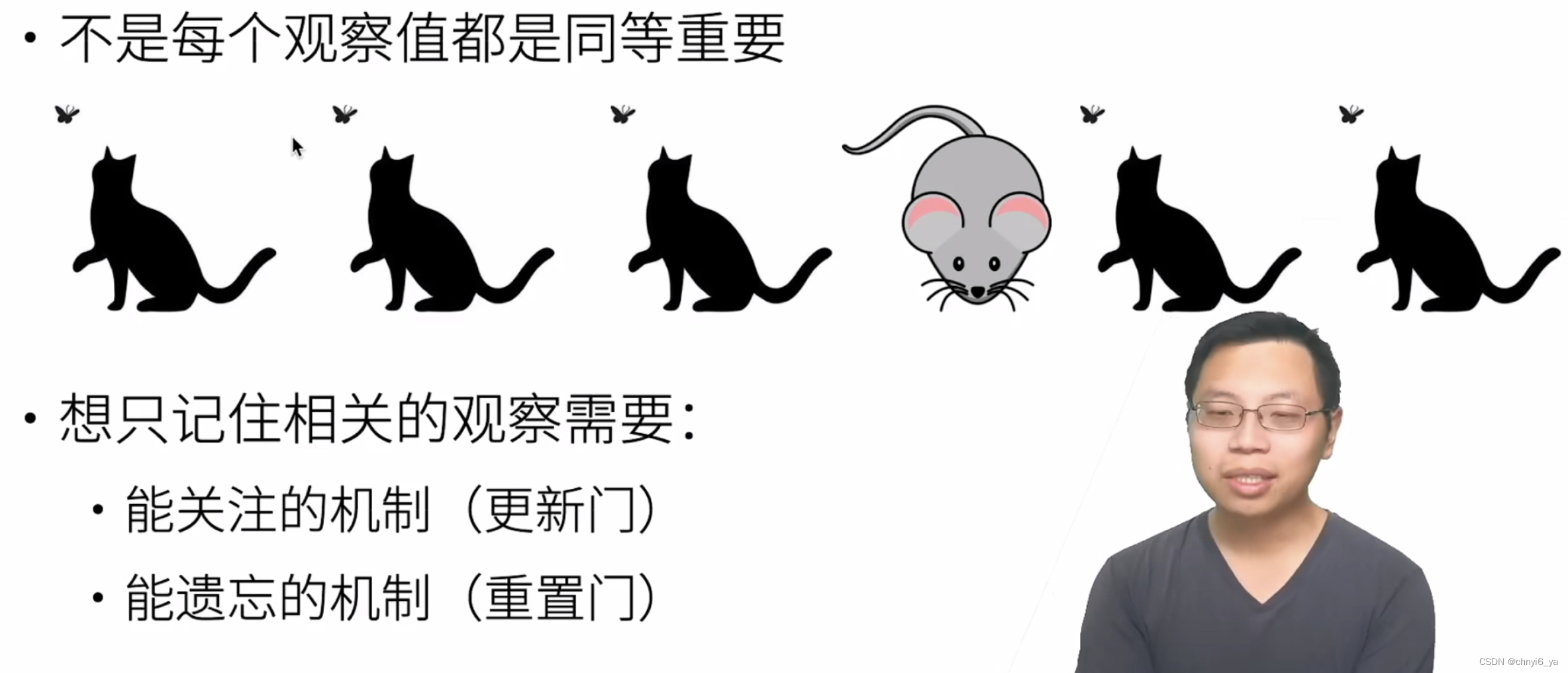
所以观察序列的话,不是每个观察值都是同等重要的。就如一篇文章中,也有一些关键句。
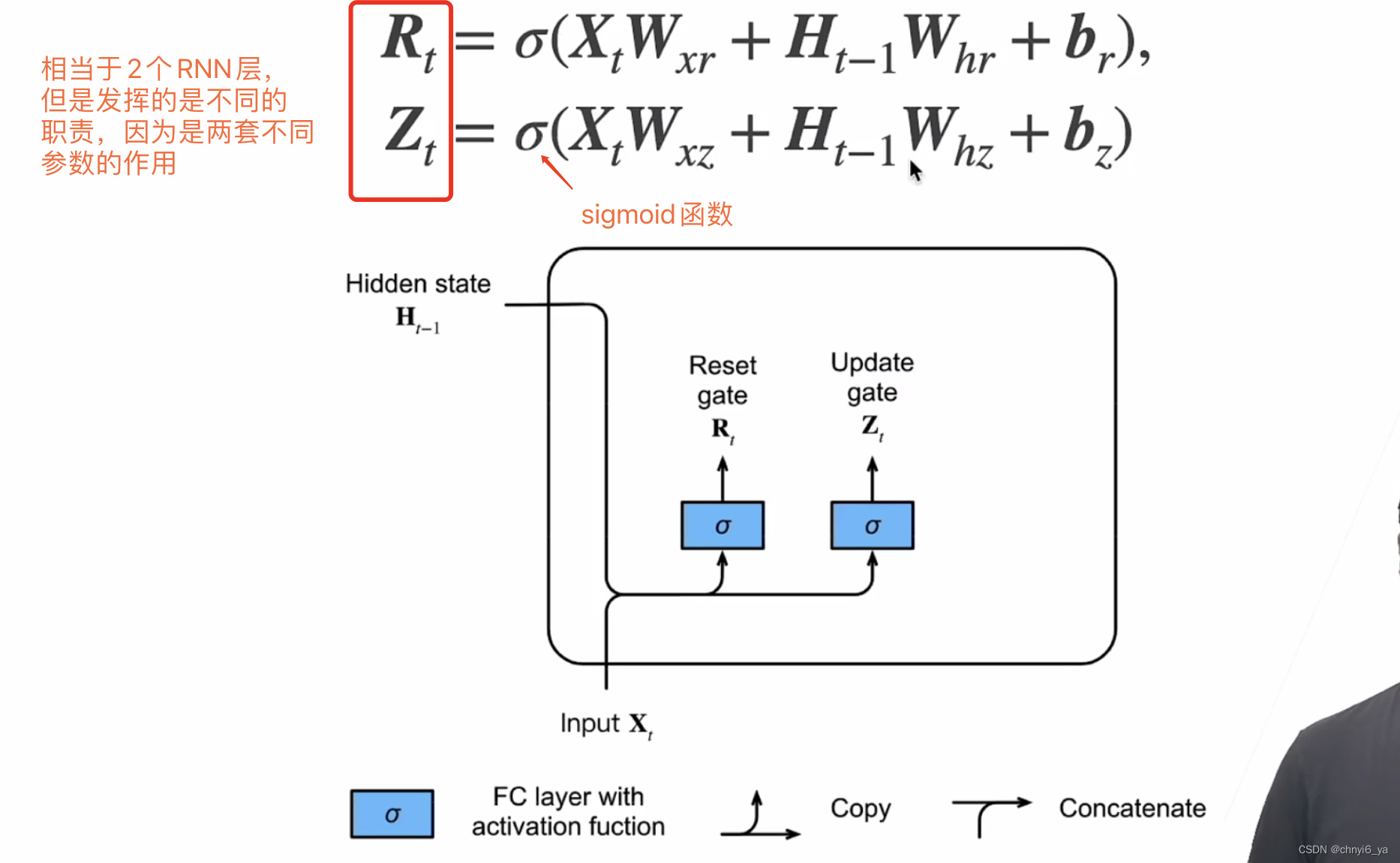
2. 门
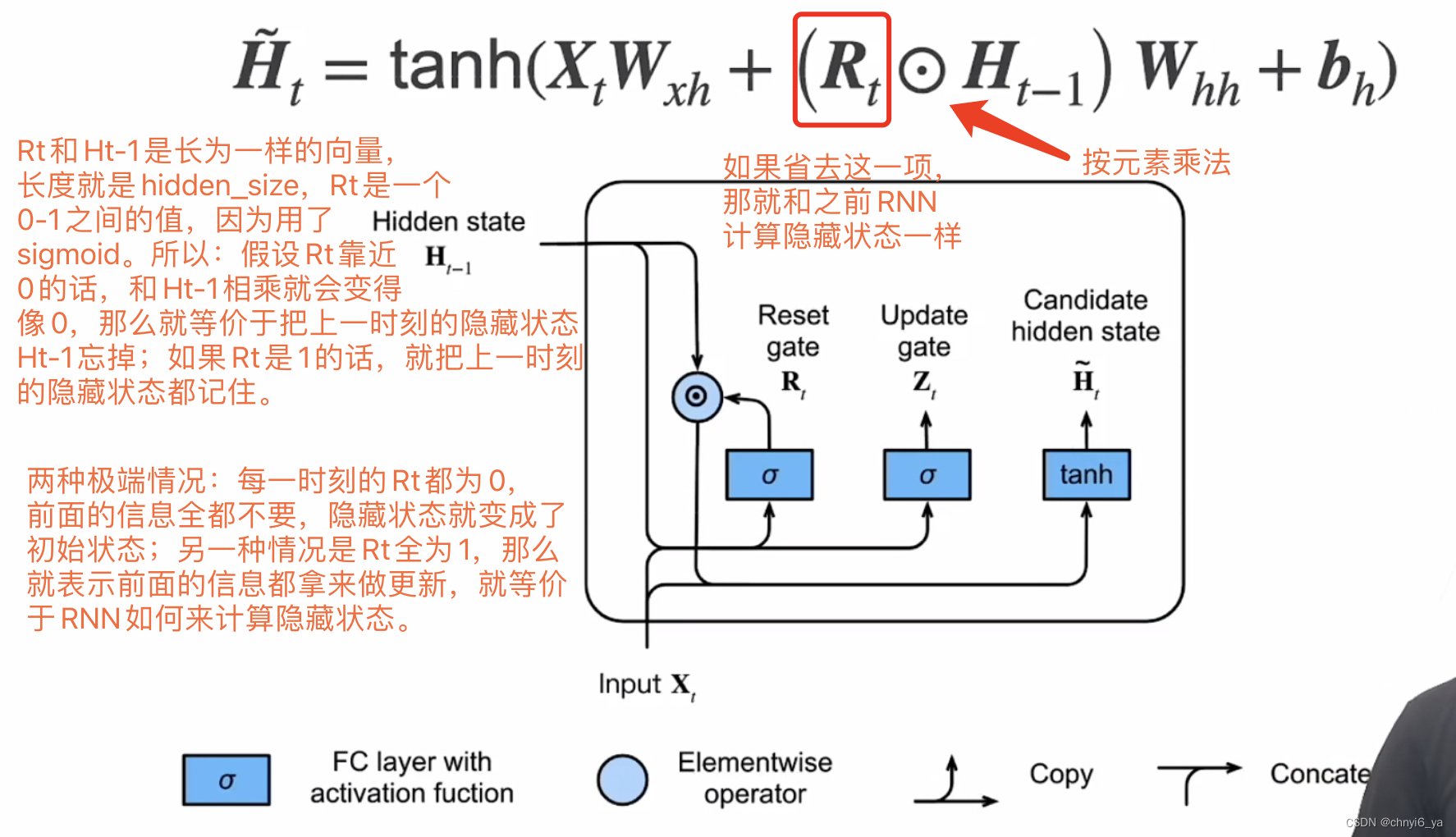
3. 候选隐状态
4. 真正的隐状态

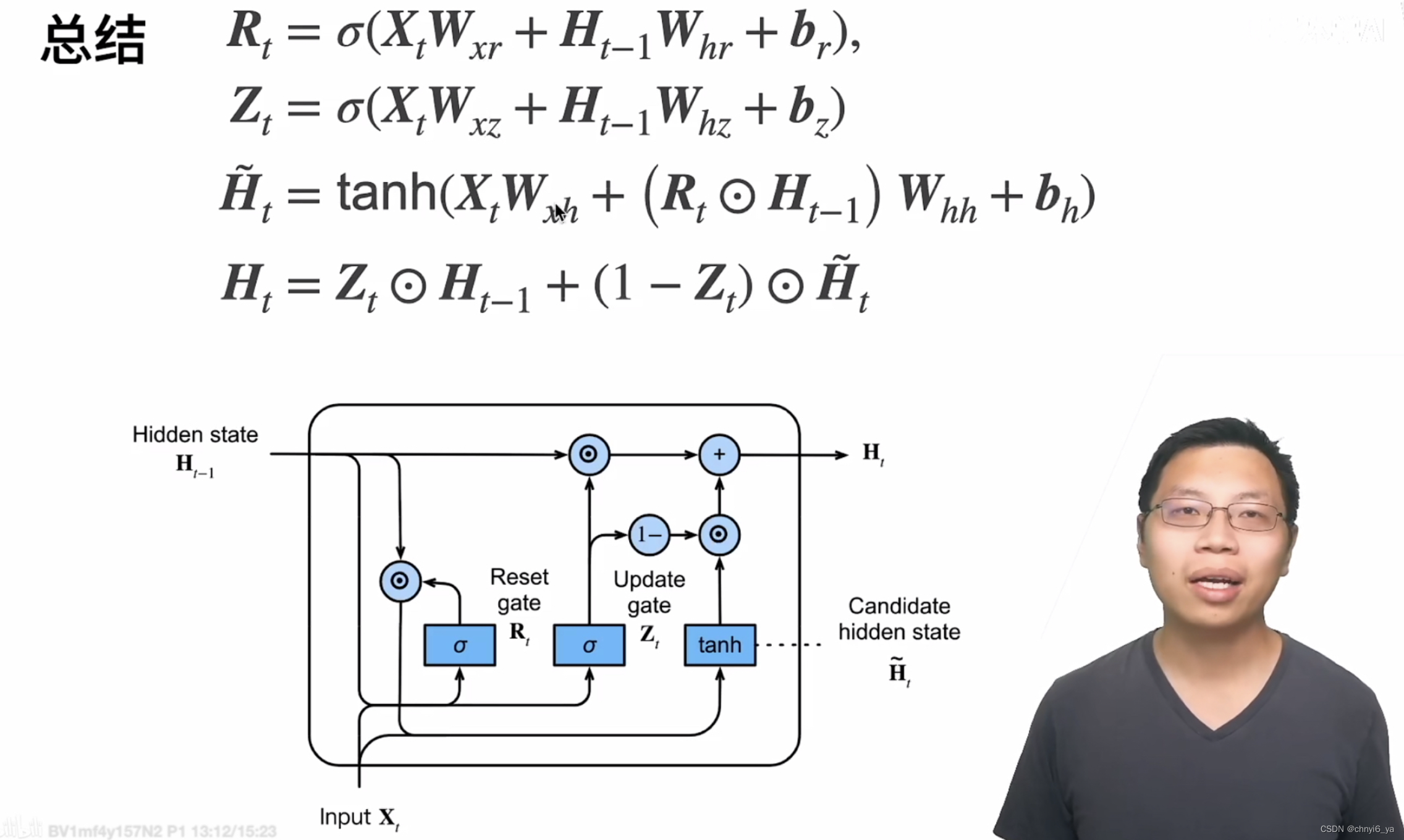
5. 总结
gru引入了两个额外的门,Wxr、Wxz、Wxh都是可学习的参数,这样就是以前RNN可学习参数的3倍,2个极端情况:Zt=1,那么这一时刻的隐藏状态就等于上一个隐藏状态,且忽略掉当前时刻的Xt;Zt=0,Rt=0时,这一时刻的隐藏状态就只需要关注当前时刻的输入Xt。
所以通过两个门Rt和Zt来控制在这两种极端情况之间做一些可学习参数的调整,使得可以控制:是多看现在的输入Xt呢,还是多看过去的信息。
其中,一种特殊情况是Zt=0,Rt=1时,就会回到RNN的情况,通过当前时刻的Xt和上一时刻的隐藏状态来更新。
6. 代码实现
6.1 从零开始实现
首先,我们读取时间机器数据集:
import torch
from torch import nn
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
1. 初始化参数模型
下一步是初始化模型参数。 我们从标准差为 0.01 的高斯分布中提取权重, 并将偏置项设为 0 ,超参数num_hiddens定义隐藏单元的数量, 实例化与更新门、重置门、候选隐状态和输出层相关的所有权重和偏置。
# 初始化模型参数
def get_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size
# 均值为0,方差为0.01的随机初始化权重
def normal(shape):
return torch.randn(size=shape, device=device)*0.01
# 辅助函数,包括:输入到hidden的W,hidden到hidden的W以及偏置
def three():
return (normal((num_inputs, num_hiddens)),
normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))
# 创建了9个可以学习的参数
W_xz, W_hz, b_z = three() # 更新门参数
W_xr, W_hr, b_r = three() # 重置门参数
# 相比RNN,GRU多出了上面这两行
W_xh, W_hh, b_h = three() # 候选隐状态参数
# 输出层参数,也是可学习的参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度,总共11个可以学习的参数
params = [W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params
2. 定义模型
现在我们将定义隐状态的初始化函数init_gru_state。 与 rnn_scratch中定义的init_rnn_state函数一样, 此函数返回一个形状为(批量大小,隐藏单元个数)的张量,张量的值全部为零。
def init_gru_state(batch_size, num_hiddens, device):
# 返回一个tuple,是全0的形状为(批量大小,隐藏单元个数)的张量
return (torch.zeros((batch_size, num_hiddens), device=device), )
现在我们准备定义门控循环单元模型, 模型的架构与基本的循环神经网络单元是相同的, 只是权重更新公式更为复杂。
def gru(inputs, state, params):
W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
# outputs是每个时刻的输出
outputs = []
for X in inputs: # inputs的形状是(num_steps,batch_size,vocab_size)
# @ 这个符号表示矩阵乘法,相当于torch.matmul()
# 等号右边的H是前一个时刻的H,左边的H是当前时刻的H
Z = torch.sigmoid((X @ W_xz) + (H @ W_hz) + b_z)
R = torch.sigmoid((X @ W_xr) + (H @ W_hr) + b_r)
H_tilda = torch.tanh((X @ W_xh) + ((R * H) @ W_hh) + b_h)
H = Z * H + (1 - Z) * H_tilda
Y = H @ W_hq + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H,)
3. 训练与预测
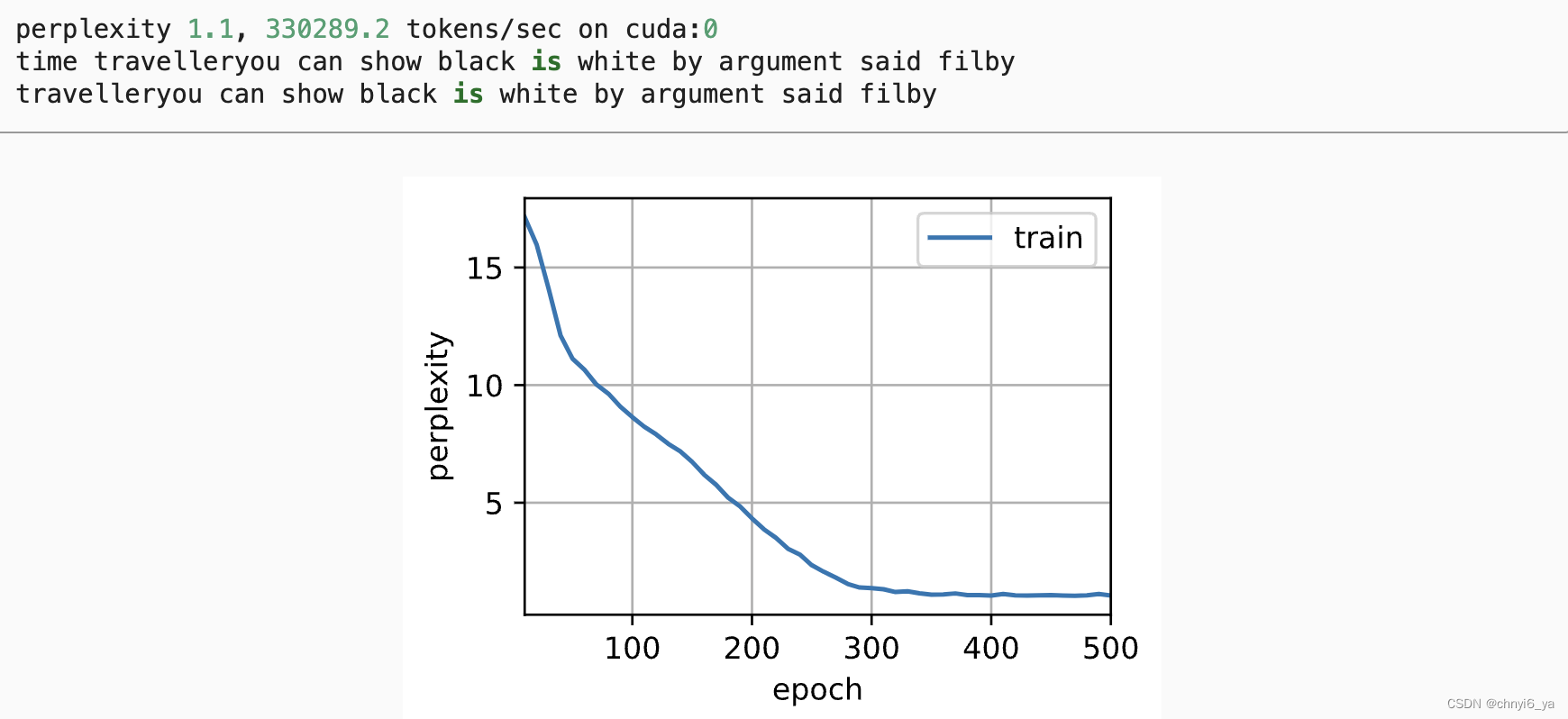
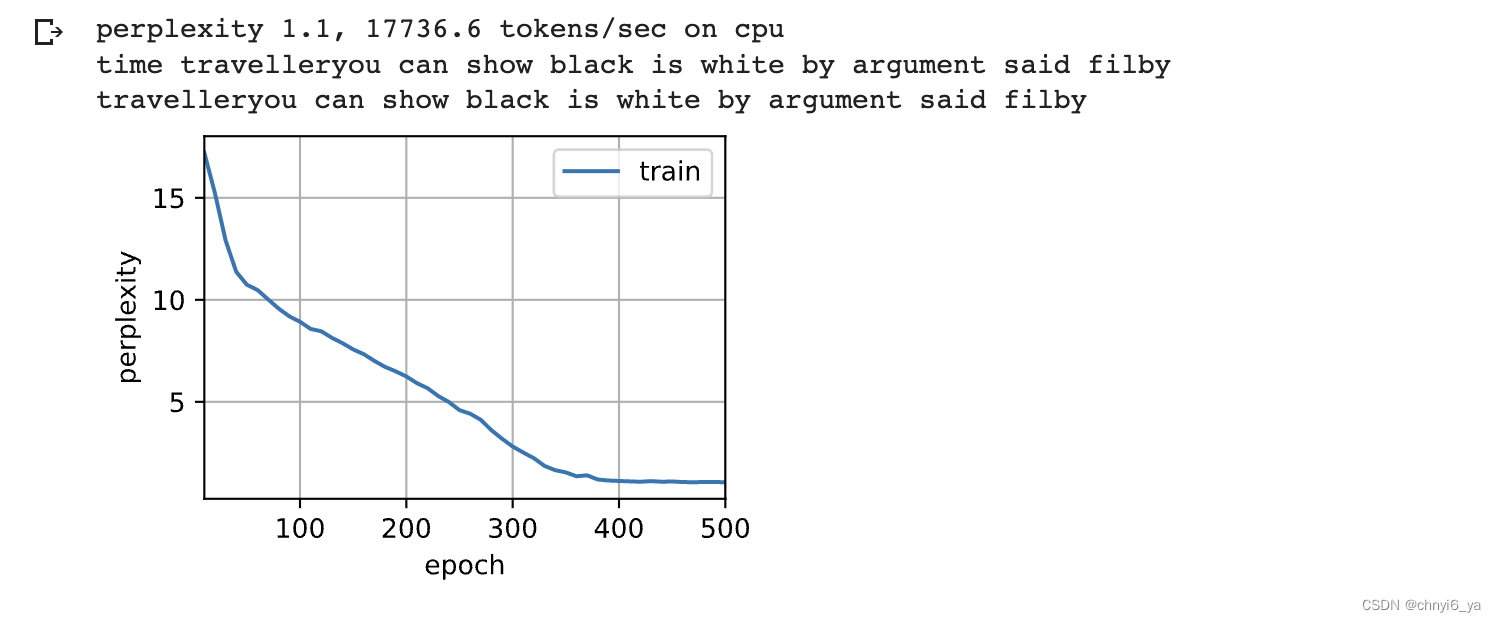
训练和预测的工作方式与rnn_scratch完全相同。 训练结束后,我们分别打印输出训练集的困惑度, 以及前缀“time traveler”和“traveler”的预测序列上的困惑度。
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
# 之前实现的RNNModelScratch足够通用
# 传入"初始化模型参数"get_params,以及"初始化状态函数"init_gru_state,
# 以及"forward"如何计算,也就是用的网络结构gru,就能得到GRU模型
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_params,
init_gru_state, gru)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
运行结果:
6. 2 简介实现
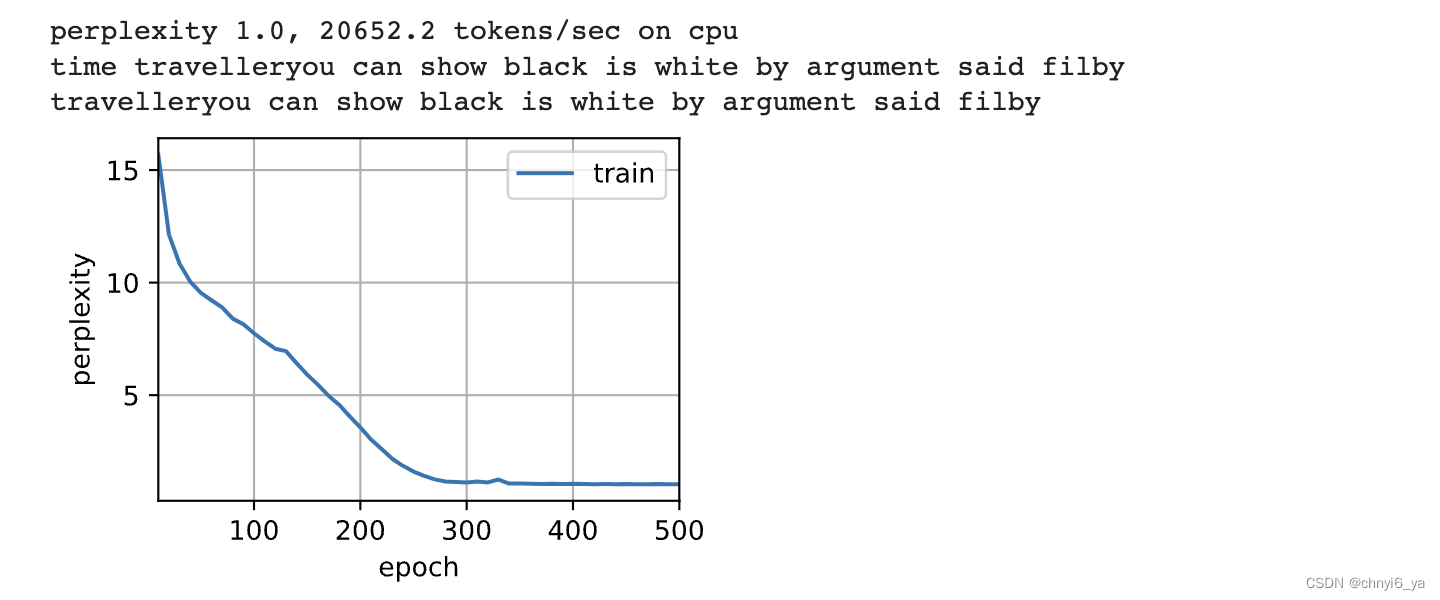
高级API包含了前文介绍的所有配置细节, 所以我们可以直接实例化门控循环单元模型。 这段代码的运行速度要快得多, 因为它使用的是编译好的运算符而不是Python来处理之前阐述的许多细节。
num_inputs = vocab_size
gru_layer = nn.GRU(num_inputs, num_hiddens)
model = d2l.RNNModel(gru_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
运行结果:
7. Q&A
Q1:GRU网络中,Rt和Zt的网络结构一样,为什么就可以自动把Rt选成Reset gate,Zt选成Update gate?
A1: 参数不同,这些参数是自己去学习的。
Q2:GRU相比RNN多了那么多参数,需不需要提高grad clipping的阈值?
A2:参数多不一定会梯度爆炸,取决于怎么做运算的。通常来说GRU、LSTM的数值稳定性比RNN更好
老师建议,在实际情况下不要用RNN,多用GRU和LSTM。GRU和LSTM没有太多坏处,除了计算量大。