参考资料:《机器人学导论》John.J.Craig
彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美_欧拉角判断动作-CSDN博客
机器人操作的定义是指通过某种机构使零件和工具在空间运动。因此,对于坐标系的定义显得尤为重要,相对于什么坐标系是描述位姿的基础。
位姿描述,描述的是位置和姿态。比如对于一个操作臂,我们除了要知道它处于什么位置之外,它的姿态也尤为重要。自然地,我们会研究如何用数学方法去表示和计算这些参量。
为了描述位置,我们需要先固定参考系,任一坐标系都能用作描述物体位姿的参考系,我们经常在不同的参考系中变换表示物体空间位姿的形式。
1.位置描述
位置矢量,左上角标注参考系

2.姿态描述
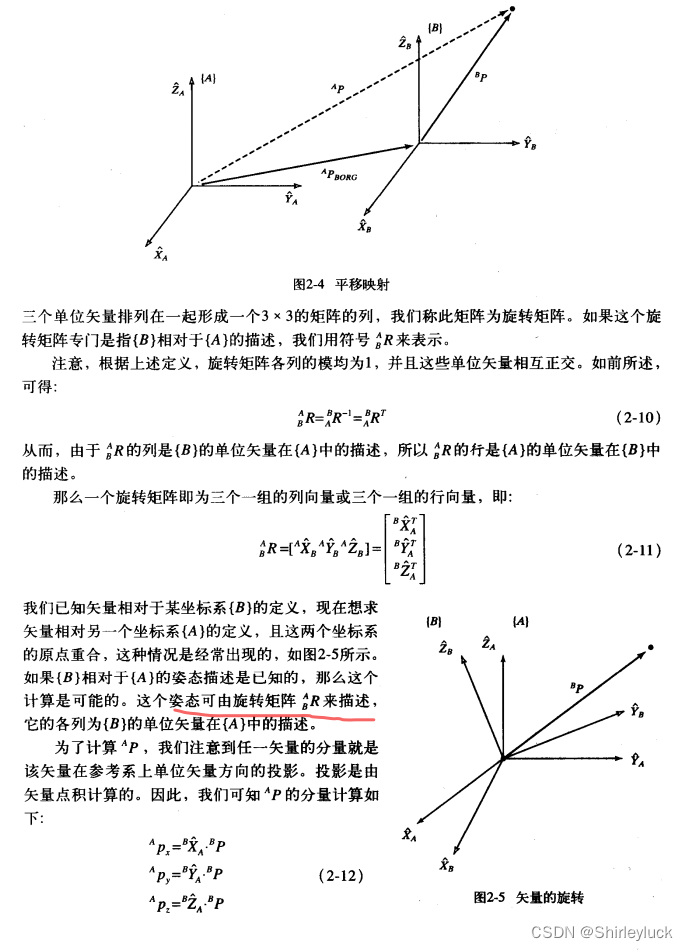
旋转矩阵表示姿态

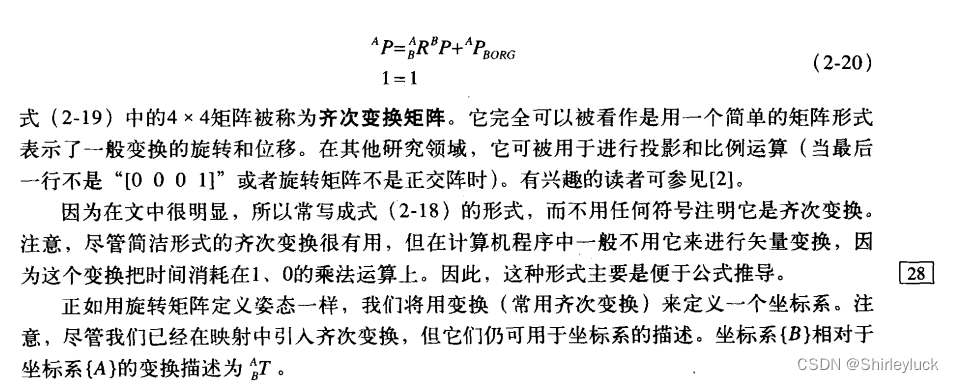
3.坐标系描述-位姿
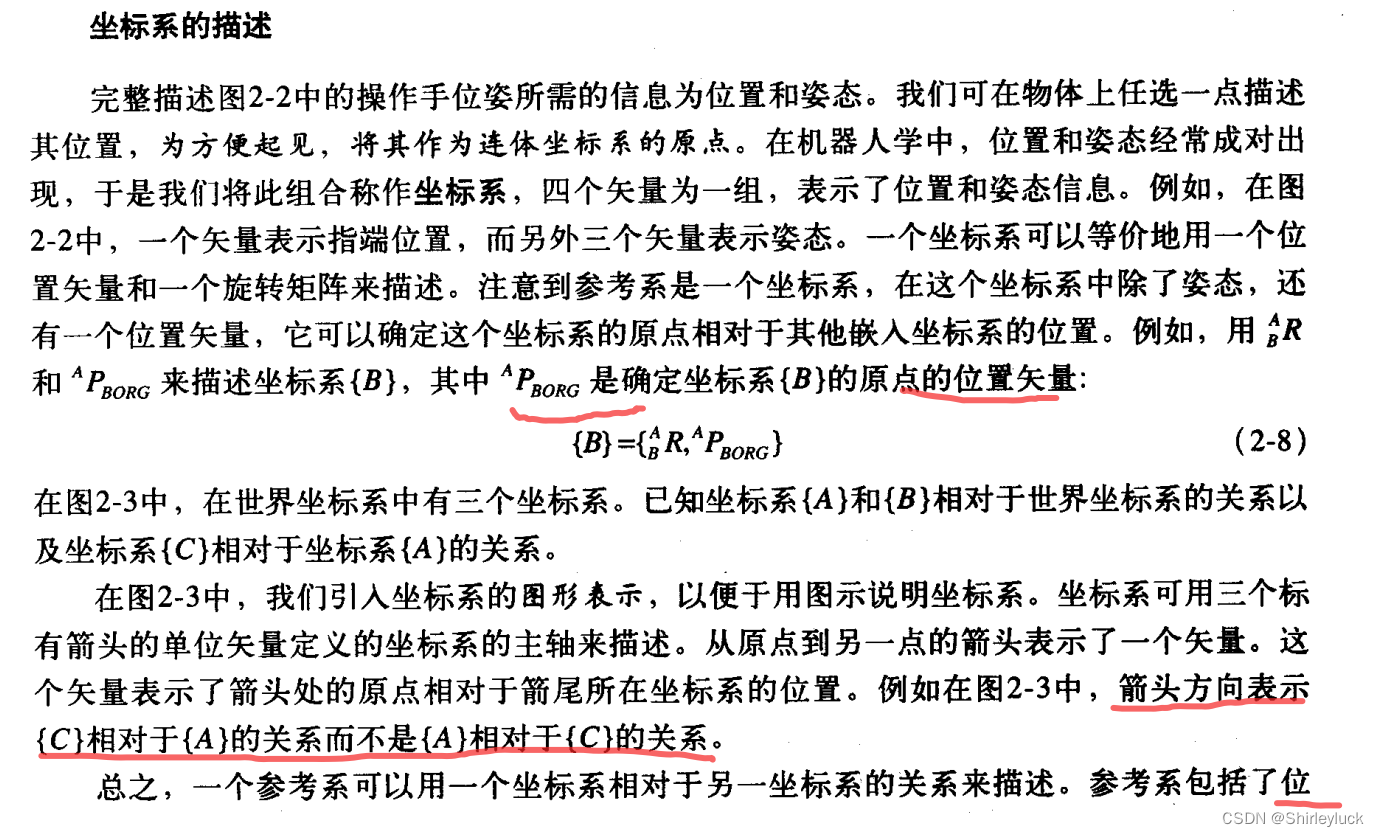

4映射-坐标变换
平移、旋转
下文中比较关键的内容
注意矩阵的行列的含义
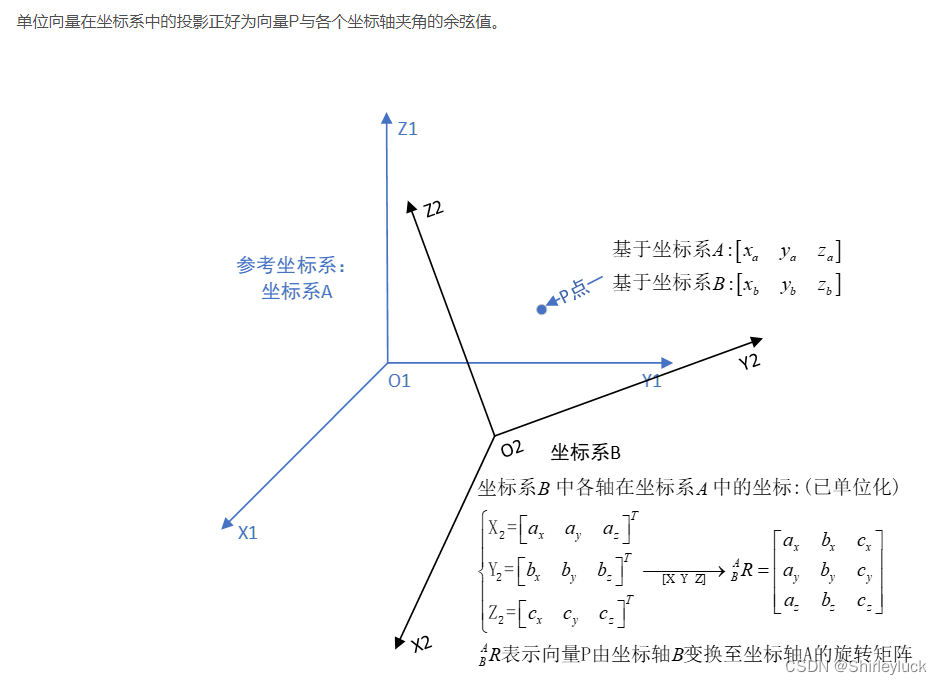
 注意是左乘旋转矩阵
注意是左乘旋转矩阵


例题:
旋转矩阵
可以看到在做坐标变换的时候旋转矩阵很重要,那旋转矩阵又是怎么得到的呢?
此部分参考:彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美_欧拉角判断动作-CSDN博客
(重要的好文章,虽然还不太理解四元数,先放着标记一下)




平移+旋转












![[7] CUDA之常量内存与纹理内存](https://img-blog.csdnimg.cn/direct/963965d3f1864028b139cb8e949f2e2d.png)