快速处理和有效利用手与物体交互过程中产生的动态触觉信号(例如触摸和抓握)对于触觉探索和灵巧的物体操作至关重要。将电子皮肤(e-skins)推进到模仿自然触觉的水平,是恢复截肢者和瘫痪患者丧失的功能的可行解决方案,并实现机器人与人类的安全物理交互以及物体操作的灵巧性。
当前的电子皮肤在与物体交互时会产生触觉信号帧,随后使用人工神经网络 (ANN) 进行处理 。然而,帧编码的功耗效率低下,因此对实际应用中需要大量传感器的电子皮肤提出了巨大的挑战。此外,生成的帧间间隔通常大于 100 ms,这对于灵巧的对象操作来说是不够的。相比之下,自然的触觉周围神经系统能够以几毫秒的时间分辨率编码高度动态的信息。
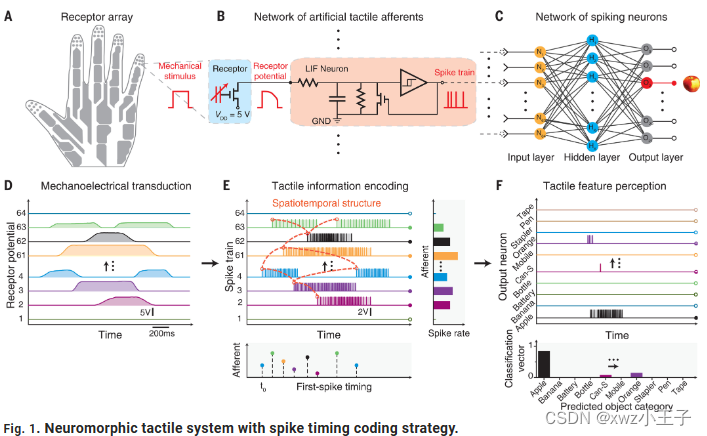
人类触觉神经系统使用基于稀疏尖峰的根本不同的原理来有效地编码(包括编码和解码)触觉信息。 人们普遍认为初级感觉神经元使用尖峰速率来传递信息,最近的研究表明,触觉传入神经集合中第一个尖峰的时间在编码高度动态的触觉信息中起着至关重要的作用。
近期Chen等人发表的Science论文研究工作,开发了一种神经形态触觉人造皮肤,能够在不同的抓取任务中实现快速、精确的物体区分。通过利用基于尖峰时序的方法来处理触觉信息,他们能够在物体分类实验中提高传统电子皮肤的性能。此外,人工传感器允许以毫秒级分辨率对触觉信息进行编码,类似于神经系统的性能。这里开发的仿生设备可用于提高假肢和其他机器人系统的性能。
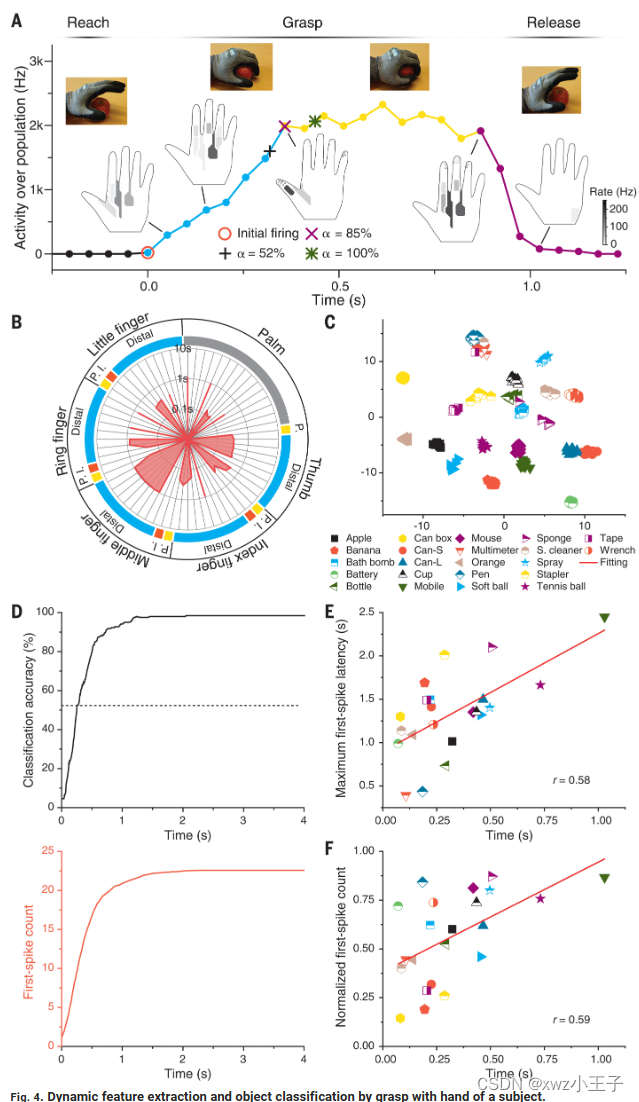
通过抓取22个形状、大小和刚度不同的日常生活物体,进一步证明了基于系统尖峰时间的动态触觉信息的有效编码和利用。抓握由参与者(受试者 1)用左手的电子皮肤进行。例如,抓握苹果代表着一系列手部姿势调整的连续运动。这种相互作用可以通过种群上的时间依赖性活动来反映,在传入元素集合中具有特征性的第一尖峰模式。由于与抓取 22 个物体相关的第一尖峰模式是不同的,因此关于抓取它们的动态信息在第一尖峰模式中得到了很好的编码。
该工作为推进神经形态触觉系统的发展奠定了坚实的基础,该系统从机理上模仿人类的触觉。在天然皮肤中复制各种机械感受器的人工受体的结合,从而增强信息编码能力和整体效率,是一条进步路线。在手部假肢的实际应用领域,最佳方法是用美容手套包裹传感阵列或将受体无缝嵌入其中。这些方法为确保精确的触觉反馈提供了可行的途径,同时保留了覆盖物的美感和功能。