虽然从零开始实现循环神经网络对了解循环神经网络的实现方式具有指导意义,但并不方便。 本节将展示如何使用深度学习框架的高级API提供的函数更有效地实现相同的语言模型。 我们仍然从读取时光机器数据集开始。
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
1. 定义模型
高级API提供了循环神经网络的实现。 我们构造一个具有256个隐藏单元的单隐藏层的循环神经网络层rnn_layer。 事实上,我们还没有讨论多层循环神经网络的意义。 现在仅需要将多层理解为一层循环神经网络的输出被用作下一层循环神经网络的输入就足够了。
num_hiddens = 256
# pytorch定义的RNN中,输入输出是len(vocab),隐藏层有num_hiddens个隐藏单元
rnn_layer = nn.RNN(len(vocab), num_hiddens)
我们使用张量来初始化隐状态,它的形状是(隐藏层数,批量大小,隐藏单元数)
state = torch.zeros((1, batch_size, num_hiddens))
state.shape
运行结果:

通过一个隐状态和一个输入,我们就可以用更新后的隐状态计算输出。需要强调的是,rnn_layer的“输出”(Y)不涉及输出层的计算: 它是指每个时间步的隐状态,这些隐状态可以用作后续输出层的输入。
X = torch.rand(size=(num_steps, batch_size, len(vocab)))
# ps:这里Y并不是输出,而是最后一个隐藏层,所以这里的维度是256,而不是len(vocab)
# Y的形状是(num_steps,batch_size,num_hiddens)
# 是指每个时间步的隐状态,这些隐状态可以用作后续输出层的输入。
Y, state_new = rnn_layer(X, state)
# state的形状是(隐藏层数,批量大小,隐藏单元数)
Y.shape, state_new.shape
与从零实现类似, 我们为一个完整的循环神经网络模型定义了一个RNNModel类。 注意,rnn_layer只包含隐藏的循环层,我们还需要创建一个单独的输出层。
class RNNModel(nn.Module):
"""循环神经网络模型"""
def __init__(self, rnn_layer, vocab_size, **kwargs):
super(RNNModel, self).__init__(**kwargs)
self.rnn = rnn_layer
self.vocab_size = vocab_size
self.num_hiddens = self.rnn.hidden_size
# 如果RNN是双向的(之后将介绍),num_directions应该是2,否则应该是1
if not self.rnn.bidirectional:
self.num_directions = 1
# 创造单独的输出层
self.linear = nn.Linear(self.num_hiddens, self.vocab_size)
else:
self.num_directions = 2
self.linear = nn.Linear(self.num_hiddens * 2, self.vocab_size)
def forward(self, inputs, state):
X = F.one_hot(inputs.T.long(), self.vocab_size) # one-hot编码
X = X.to(torch.float32)
# 得到的Y是中间的隐藏状态,形状是(时间步数,批量大小,隐藏单元数)
Y, state = self.rnn(X, state)
# 全连接层首先将Y的形状改为(时间步数*批量大小,隐藏单元数)
# output的输出形状是(时间步数*批量大小,词表大小)。
output = self.linear(Y.reshape((-1, Y.shape[-1])))
return output, state
def begin_state(self, device, batch_size=1):
if not isinstance(self.rnn, nn.LSTM):
# nn.GRU以张量作为隐状态
return torch.zeros((self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens),
device=device)
else:
# nn.LSTM以元组作为隐状态
return (torch.zeros((
self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens), device=device),
torch.zeros((
self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens), device=device))
2. 训练与预测
在训练模型之前,让我们基于一个具有随机权重的模型进行预测。
device = d2l.try_gpu()
net = RNNModel(rnn_layer, vocab_size=len(vocab))
net = net.to(device)
d2l.predict_ch8('time traveller', 10, net, vocab, device)
运行结果:

很明显,这种模型根本不能输出好的结果。 接下来,我们使用从零实现的代码中定义的超参数调用train_ch8,并且使用高级API训练模型。
num_epochs, lr = 500, 1
d2l.train_ch8(net, train_iter, vocab, lr, num_epochs, device)
运行结果:
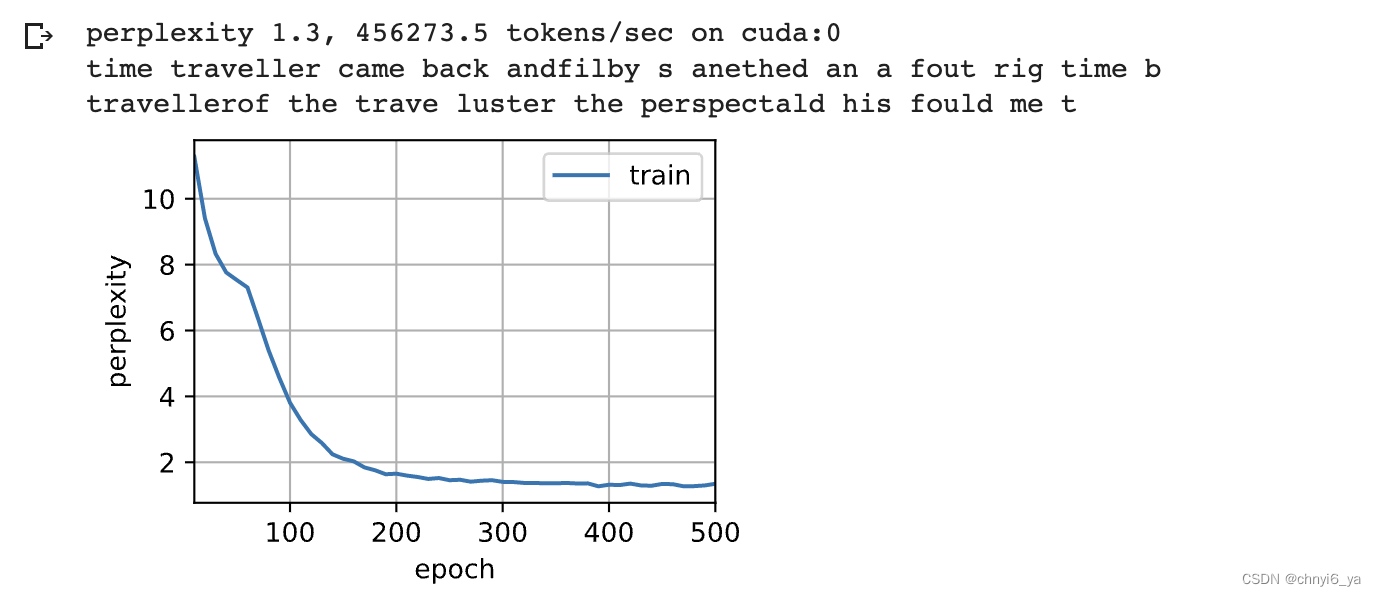
可以看出,速度更快,原因是:从零开始实现的时候是一堆小矩阵的乘法做的。而用框架实现可以把小矩阵乘法变成大矩阵乘法,就把小矩阵concat成大矩阵,然后做一次矩阵乘法就出去了。因为在同样的计算量下,多次小矩阵乘法的开销要大于一次大矩阵乘法。
与上一节相比,由于深度学习框架的高级API对代码进行了更多的优化, 该模型在较短的时间内达到了较低的困惑度。
3. Q&A
Q1: num_steps是什么?
A1:给定一个长为num_steps的序列,要去一次预测之后每一个长为num_steps的序列。一个序列长度为num_steps,所以要做num_steps次分类。
Q2:为什么是批量大小 x 时间长度?
A2: 因为每一个批量的每一个样本的长度是T(也就是时间长度),然后实际上是要做T次分类。如果从多分类的角度来讲,给一个小批量,其实要做的分类次数是批量大小 x 时间长度,就是对任何一个样本在任何一个时间点都要做一次分类,所以等价于一个小批量中有 批量大小 x 时间长度个样本需要进行分类。
Q3:H是每个step都在变化吗?
A3:是的,H是在每个时间维度变化的。如果一个batch里面,有batch_size个样本,一个样本长度是T的话,那么在batch里面H会被更新T x batch_size次。但是根据采样方式的不一样,当前batch的H要不要丢给下一个batch,还是直接砍断了,需要根据下一个batch和前一个batch的序列是否接在一起来判断。

![[BJDCTF2020]Easy MD5(浅谈PHP弱类型hash比较缺陷)](https://img-blog.csdnimg.cn/44a98362352b4eaa8996fc10d4c26504.png)