子空间投影
从向量的投影入手,延伸到高维投影,并将投影使用矩阵形式给出。做投影也即向另一个向量上做垂线。上一章讨论的Ax=b无解时的最优解求解时,并没有解释这个最优解为何“最优”,本节课给出相应的解释。
相对简单的二维空间的投影
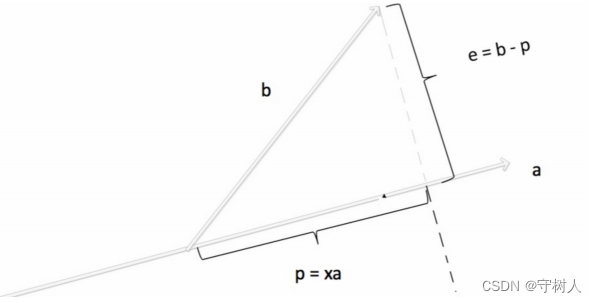
如上图,p也即向量a在向量上的投影,p在向量a上,是a的倍数,故令p=xa 。将b与p的差
设为e,带有误差的意思,同时e的模在某种程度上表示了b到a的最短距离(而这正是最优的体
现:误差最小)。 e与 a正交。
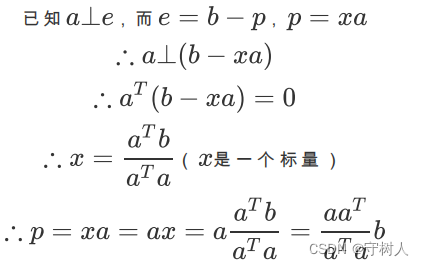 注意, 其中的 aTa 是一个标量,而 aaT是一个矩阵。假设b变为原来的 2倍,那么显然投影p 也变为原来的 2倍。但如果a变为原来的 2 倍,整个aaT/aTa并没有发生变化,所以投影 p 不变。
注意, 其中的 aTa 是一个标量,而 aaT是一个矩阵。假设b变为原来的 2倍,那么显然投影p 也变为原来的 2倍。但如果a变为原来的 2 倍,整个aaT/aTa并没有发生变化,所以投影 p 不变。
令P = aaT/aTa,则有p = Pb,将P称为投影矩阵,则当向量与P相乘后,即可得到向量对应得到a上的投影。
投影矩阵的性质:
(1)rank(p)= 1
(2)向量 是 的列空间的基,向量 所在的直线是 的列空间。
(3)P是对称的。
(4)P2 = P。因为给定向量 ,对其进行一次 投影和对其进行两次投影,结果相同。
最小二乘法初涉
如图,要求找到一条最优的直线来拟合图中的三个点
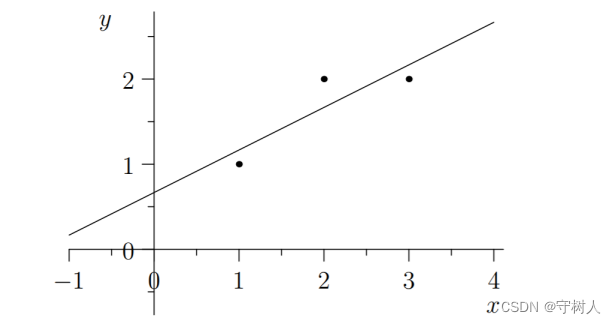
假设最优直线方程为C+Dt = b ,代入三个点(1,1),(2,2),(3,2) 可得方程组:
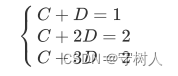
写作矩阵形式有:
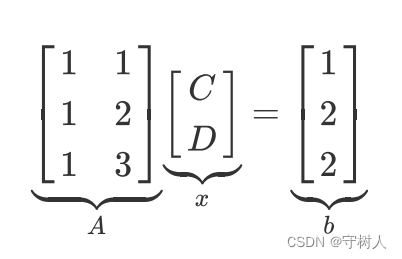
显然方程组无解,但 有解( 的各列线性无关),而
有解( 的各列线性无关),而  也是最小二乘法的核心方程
也是最小二乘法的核心方程



![P1028 [NOIP2001 普及组] 数的计算————C++](https://img-blog.csdnimg.cn/8016e048bbe1460591d3170640774549.png)