【浅水模型MATLAB】尝试完成一个数值模拟竞赛题
- 前言
- 题目描述
- 问题分析
- 理论基础
- 控制方程
- 数值方法
- 边界条件
- 代码框架与关键代码
- 结果展示
- 写在最后
更新于2024年5月25日
前言
最近看到第四届水科学数值模拟创新大赛的通知,就好奇翻看了前几年的比赛试题。发现去年的一个试题十分有趣,而且实现难度不是很大。因此,想着自己动手,从零开始学一下原理、做一下模型、编一下代码。
由于本人平时用Matlab较多,且Matlab代码可读性较强,容易与数学公式联系。所以,以下代码部分均用的Matlab。
如果你习惯别的代码,也想做类似的建模尝试,十分欢迎一起交流!(最近有点想转python代码了,希望感兴趣的同志来一起交流)
如果各位朋友发现了文章或代码中的错误,亦或是改进之处,请不吝赐教,欢迎大家留言,一起改进模型!本博客文章将持续更新,上面也会标注提出改进建议的同志们。(不过,本人最近在忙活毕业论文,可能更新不及时)
同时,想要完整代码的朋友请联系我,我可无偿提供脚本文件。
希望同大家一起进步!
通知链接:关于公布第三届水科学数值模拟创新大赛复赛试题的通知
题目链接:河道水动力模拟(青年组).pdf
题目描述
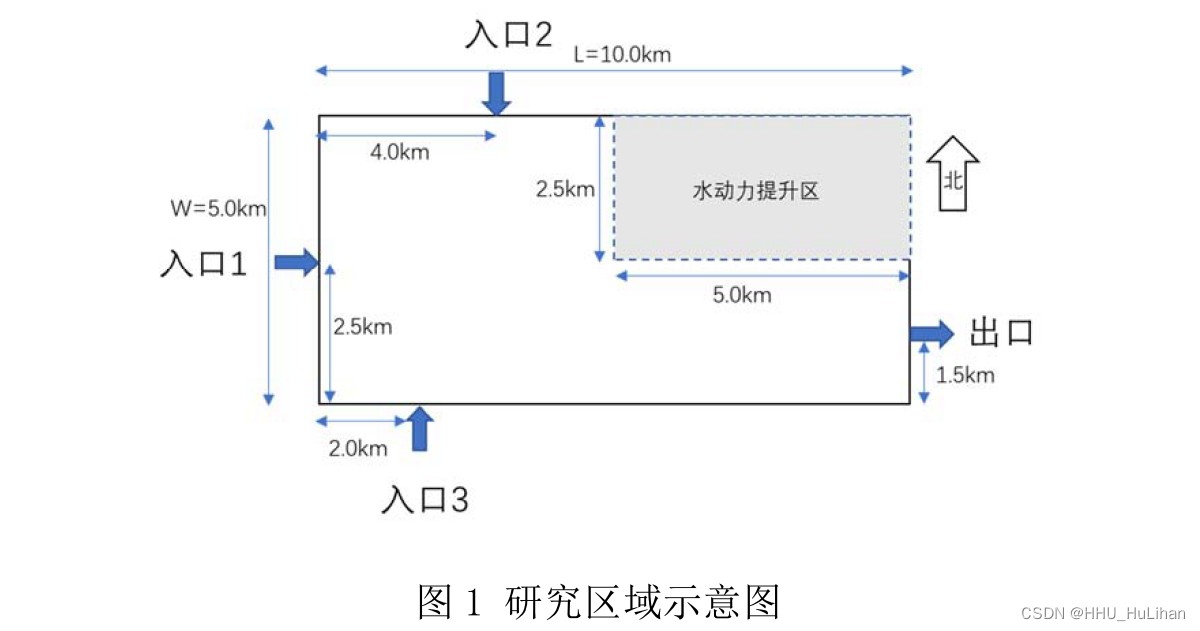
某浅水湖泊承担着涵养水源、净化环境、调节径流、维护区域生物多样性等多种重要的水安全保障功能。由于该湖泊地处平原地带,湖体局部水动力条件微弱,需通过有限的外调水量增强湖泊整体水动力,实现活水提质。
研究湖泊为矩形平底浅水湖泊,长L = 10km,宽 W = 5km,糙率为n = 0.02(Manning系数);该湖泊通过3个入口与1个出口与外部河道连通,入口及出口口门宽均为100m;3个入口总入湖流量为 100m3/s,出口水位为2.0m;多年监测数据表明,该湖泊东北区约占整个湖体 1/4 面积大小的区域(下图阴影区域)水动力偏弱,需通过调控入口流量增强该区水动力。
问题分析
根据题目描述,我们可以设计一个二维浅水方程模型(垂向平均水动力方程)。涉及到的边界条件包括入流边界条件、水位边界条件。
其次,模型的计算域是一个简单的矩形。因此,我们可以采用结构化矩形网格和笛卡尔坐标系。同时,这样的处理方式简化了建模过程。
此外,计算区域中没有浅滩,所有的区域水深都大于0,即没有干-湿边界的问题。这也简化了问题本身,简化了建模过程。
设计模型的思路如下:
- 设计一个二维浅水方程的求解器,通过一个简单的溃坝算例测试其性能(也可以从一维浅水方程求解器开始,这样更为简单);
- 尝试加入两种边界条件,使其正常运行;
- 根据上图要求,完成整个模型。
本博文内容就省略前面两个步骤了,直接描述如何构建整个模型。但是,我也确实进行了前两个步骤,我认为对于模型开发而言,前两个步骤是十分必要的。
理论基础
在原理上,我参考了Liang等1的数值模拟研究。他们的模型采用了有限体积法,以Godunov型方法为框架,求解了适应复杂地形并保持良好平衡特性的二维浅水方程。
控制方程
矩阵形式的浅水方程如下:
∂
U
∂
t
+
∂
E
(
U
)
∂
x
+
∂
G
(
U
)
∂
y
=
S
(
U
)
U
=
(
h
h
u
h
v
)
,
E
(
U
)
=
(
h
u
h
u
2
+
g
h
2
2
h
u
v
)
,
G
(
U
)
=
(
h
v
h
u
v
h
v
2
+
g
h
2
2
)
,
S
(
U
)
=
(
0
−
τ
b
x
ρ
−
g
h
∂
z
b
∂
x
−
τ
b
y
ρ
−
g
h
∂
z
b
∂
y
)
\dfrac{\partial \bold{U}}{\partial t} + \dfrac{\partial \bold{E(U)}}{\partial x} + \dfrac{\partial \bold{G(U)}}{\partial y} = \bold{S(U)} \\[6pt] \bold{U} = \left( \begin{matrix} h \\ hu \\ hv \end{matrix} \right), \bold{E(U)} = \left( \begin{matrix} hu \\ hu^2+\dfrac{gh^2}{2} \\ huv \end{matrix} \right), \bold{G(U)} = \left( \begin{matrix} hv \\ huv \\ hv^2+\dfrac{gh^2}{2} \end{matrix} \right), \\[6pt] \bold{S(U)} = \left( \begin{matrix} 0 \\ -\dfrac{\tau_{bx}}{\rho}-gh\dfrac{\partial z_b}{\partial x} \\ -\dfrac{\tau_{by}}{\rho}-gh\dfrac{\partial z_b}{\partial y} \end{matrix} \right)
∂t∂U+∂x∂E(U)+∂y∂G(U)=S(U)U=
hhuhv
,E(U)=
huhu2+2gh2huv
,G(U)=
hvhuvhv2+2gh2
,S(U)=
0−ρτbx−gh∂x∂zb−ρτby−gh∂y∂zb
式中,
h
h
h表示水深,
η
η
η表示水位,
u
u
u、
v
v
v分别表示两个方向的水平流速,
z
b
z_b
zb表示底高程,
ρ
\rho
ρ表示水体密度;切应力
τ
\tau
τ的表达式:
τ
b
x
=
ρ
C
f
u
u
2
+
v
2
τ
b
y
=
ρ
C
f
v
u
2
+
v
2
C
f
=
g
n
2
h
1
/
3
\tau_{bx}=\rho C_f u \sqrt{u^2 + v^2} \\[6pt] \tau_{by}=\rho C_f v \sqrt{u^2 + v^2} \\[6pt] C_f = gn^2 h^{1/3}
τbx=ρCfuu2+v2τby=ρCfvu2+v2Cf=gn2h1/3
式中,n表示Manning系数。水位η、水深h及水底高程zb的相对关系是:
η
=
h
+
z
b
\eta = h + z_b
η=h+zb
由于传统的Godunov型有限体积法不能保证水体在静止状态时压力与底坡源项的平衡,即会在静水条件下产生虚假流动。因此,Liang等改进了上述方程,得到了如下的平衡形式:
U
=
(
η
h
u
h
v
)
,
E
(
U
)
=
(
h
u
h
u
2
+
1
2
g
(
η
2
−
2
η
z
b
)
h
u
v
)
,
G
(
U
)
=
(
h
v
h
u
v
h
v
2
+
1
2
g
(
η
2
−
2
η
z
b
)
)
,
S
(
U
)
=
(
0
−
τ
b
x
ρ
−
g
η
∂
z
b
∂
x
−
τ
b
y
ρ
−
g
η
∂
z
b
∂
y
)
\bold{U} = \left( \begin{matrix} η \\ hu \\ hv \end{matrix} \right), \bold{E(U)} = \left( \begin{matrix} hu \\ hu^2+\dfrac{1}{2}g(\eta^2-2\eta z_b) \\ huv \end{matrix} \right), \\[6pt] \bold{G(U)} = \left( \begin{matrix} hv \\ huv \\ hv^2+\dfrac{1}{2}g(\eta^2-2\eta z_b) \end{matrix} \right), \bold{S(U)} = \left( \begin{matrix} 0 \\ -\dfrac{\tau_{bx}}{\rho}-g\eta\dfrac{\partial z_b}{\partial x} \\ -\dfrac{\tau_{by}}{\rho}-g\eta\dfrac{\partial z_b}{\partial y} \end{matrix} \right)
U=
ηhuhv
,E(U)=
huhu2+21g(η2−2ηzb)huv
,G(U)=
hvhuvhv2+21g(η2−2ηzb)
,S(U)=
0−ρτbx−gη∂x∂zb−ρτby−gη∂y∂zb
上述这个方程组就是我们的模型的基础!
数值方法
首先,我们将u、v、h等物理量定义在网格的中心。从左至右,网格的编号依次为i = 1,2,3, …, M;从下至上,网格的编号依次为j = 1,2,3, …, N。因此,网格中心的坐标写作
x
i
,
j
x_{i,j}
xi,j和
y
i
,
j
y_{i,j}
yi,j,网格大小可写作
Δ
x
i
=
x
i
+
1
/
2
−
x
i
−
1
/
2
\Delta x_{i} = x_{i+1/2} - x_{i-1/2}
Δxi=xi+1/2−xi−1/2和
y
j
=
y
j
+
1
/
2
−
y
j
−
1
/
2
y_{j}=y_{j+1/2} - y_{j-1/2}
yj=yj+1/2−yj−1/2。
在时间域上,模型采用二阶龙格库塔格式。已知n时间步的水力变量
U
n
\bold{U}^n
Un,则下一时间步的
U
n
+
1
\bold{U}^{n+1}
Un+1为:
U
(
1
)
−
U
n
Δ
t
=
−
(
∂
F
∂
x
+
∂
G
∂
y
)
n
+
S
n
U
(
2
)
−
U
(
1
)
Δ
t
=
−
(
∂
F
∂
x
+
∂
G
∂
y
)
(
1
)
+
S
(
1
)
U
n
+
1
=
1
2
(
U
n
+
U
(
2
)
)
\dfrac{\bold{U}^{(1)}-\bold{U}^{n}}{\Delta t} = -(\dfrac{\partial \bold{F}}{\partial x}+ \dfrac{\partial \bold{G}}{\partial y})^n+\bold{S}^n \\[6pt] \dfrac{\bold{U}^{(2)}-\bold{U}^{(1)}}{\Delta t}= -(\dfrac{\partial \bold{F}}{\partial x}+ \dfrac{\partial \bold{G}}{\partial y})^{(1)}+\bold{S}^{(1)} \\[6pt] \bold{U}^{n+1} = \dfrac{1}{2}(\bold{U}^{n}+\bold{U}^{(2)})
ΔtU(1)−Un=−(∂x∂F+∂y∂G)n+SnΔtU(2)−U(1)=−(∂x∂F+∂y∂G)(1)+S(1)Un+1=21(Un+U(2))
式中的
Δ
t
\Delta t
Δt表示时间步长,它是通过CFL条件来确定的;每一次时间步进时,
Δ
t
\Delta t
Δt的计算过程如下:
Δ
t
=
C
m
i
n
(
Δ
t
x
,
Δ
t
y
)
Δ
t
x
=
m
i
n
[
Δ
x
i
∣
u
i
∣
+
g
h
i
]
Δ
t
y
=
m
i
n
[
Δ
y
j
∣
v
j
∣
+
g
h
j
]
\Delta t=C min(\Delta t_x, \Delta t_y) \\[6pt] \Delta t_x = min[\dfrac{\Delta x_i}{|u_i|+\sqrt{gh_i}}] \\[6pt] \Delta t_y = min[\dfrac{\Delta y_j}{|v_j|+\sqrt{gh_j}}]
Δt=Cmin(Δtx,Δty)Δtx=min[∣ui∣+ghiΔxi]Δty=min[∣vj∣+ghjΔyj]
式中,C表示Courant数字;数值计算稳定的必要条件是C<1.0。一般的,C取0.5~0.75。对于时间步进式中的通量导数项,它的离散形式如下:
∂
F
∂
x
=
F
i
+
1
/
2
,
j
−
F
i
−
1
/
2
,
j
Δ
x
∂
G
∂
y
=
G
i
,
j
+
1
/
2
−
G
i
,
j
−
1
/
2
Δ
y
\dfrac{\partial \bold{F}}{\partial x} = \dfrac{\bold{F}_{i+1/2,j} - \bold{F}_{i-1/2,j}}{\Delta x} \\[6pt] \dfrac{\partial \bold{G}}{\partial y} = \dfrac{\bold{G}_{i,j+1/2} - \bold{G}_{i,j-1/2}}{\Delta y}
∂x∂F=ΔxFi+1/2,j−Fi−1/2,j∂y∂G=ΔyGi,j+1/2−Gi,j−1/2
在求解网格边界(i+1/2, j)和(i, j+1/2)处的通量时,需要通过一个局部黎曼问题的求解器,以确定网格边界处的通量F和G。在此,我们选择HLL求解这个局部黎曼问题。对于网格边界处的水位、水深、流速等物理量的值,我们则通过分段线性重构的方式得到。
分段线性重构可以得到一个边界左右(或上下)两侧的物理量值。分段线性重构的数学表达式如下:
U
i
+
1
/
2
,
j
L
=
U
i
,
j
+
Δ
x
i
2
L
i
m
(
U
i
,
j
−
U
i
−
1
,
j
x
i
−
x
i
−
1
,
U
i
+
1
,
j
−
U
i
,
j
x
i
+
1
−
x
i
)
U
i
+
1
/
2
,
j
R
=
U
i
+
1
,
j
−
Δ
x
i
+
1
2
L
i
m
(
U
i
+
1
,
j
−
U
i
,
j
x
i
+
1
−
x
i
,
U
i
+
2
,
j
−
U
i
+
1
,
j
x
i
+
2
−
x
i
+
1
)
U
i
,
j
+
1
/
2
L
=
U
i
,
j
+
Δ
y
j
2
L
i
m
(
U
i
,
j
−
U
i
,
j
−
1
y
j
−
y
j
−
1
,
U
i
,
j
+
1
−
U
i
,
j
y
j
+
1
−
y
j
)
U
i
,
j
+
1
/
2
R
=
U
i
,
j
+
1
−
Δ
y
j
+
1
2
L
i
m
(
U
i
,
j
+
1
−
U
i
,
j
y
j
+
1
−
y
j
+
1
,
U
i
,
j
+
2
−
U
i
,
j
+
1
y
j
+
2
−
y
j
+
1
)
U_{i+1/2,j}^L = U_{i,j} + \dfrac{\Delta x_{i}}{2}Lim(\dfrac{U_{i,j}-U_{i-1,j}}{x_{i}-x_{i-1}},\dfrac{U_{i+1,j}-U_{i,j}}{x_{i+1}-x_{i}})\\[6pt] U_{i+1/2,j}^R = U_{i+1,j} - \dfrac{\Delta x_{i+1}}{2}Lim(\dfrac{U_{i+1,j}-U_{i,j}}{x_{i+1}-x_{i}},\dfrac{U_{i+2,j}-U_{i+1,j}}{x_{i+2}-x_{i+1}})\\[6pt] U_{i,j+1/2}^L = U_{i,j} + \dfrac{\Delta y_{j}}{2}Lim(\dfrac{U_{i,j}-U_{i,j-1}}{y_{j}-y_{j-1}},\dfrac{U_{i,j+1}-U_{i,j}}{y_{j+1}-y_{j}})\\[6pt] U_{i,j+1/2}^R = U_{i,j+1} - \dfrac{\Delta y_{j+1}}{2}Lim(\dfrac{U_{i,j+1}-U_{i,j}}{y_{j+1}-y_{j+1}},\dfrac{U_{i,j+2}-U_{i,j+1}}{y_{j+2}-y_{j+1}})
Ui+1/2,jL=Ui,j+2ΔxiLim(xi−xi−1Ui,j−Ui−1,j,xi+1−xiUi+1,j−Ui,j)Ui+1/2,jR=Ui+1,j−2Δxi+1Lim(xi+1−xiUi+1,j−Ui,j,xi+2−xi+1Ui+2,j−Ui+1,j)Ui,j+1/2L=Ui,j+2ΔyjLim(yj−yj−1Ui,j−Ui,j−1,yj+1−yjUi,j+1−Ui,j)Ui,j+1/2R=Ui,j+1−2Δyj+1Lim(yj+1−yj+1Ui,j+1−Ui,j,yj+2−yj+1Ui,j+2−Ui,j+1)
式中的U可以表示水位、水深、流速等任一物理量,Lim则表示斜率限制器。为了保持数值稳定,本模型采用了minmod限制器:
m
i
n
m
o
d
(
a
,
b
)
=
{
0
,
a
b
≤
0
m
i
n
(
∣
a
∣
,
∣
b
∣
)
,
a
b
>
0
minmod(a,b)= \begin{cases} 0,\quad& ab \leq0 \\ min(|a|,|b|),\quad& ab>0 \end{cases}
minmod(a,b)={0,min(∣a∣,∣b∣),ab≤0ab>0
在通过斜率限制器进行分段线性重构后,得到了网格边界的水位、水深、流速,也计算出了网格边界处的通量FL、FR、GL和GR。之后通过HLL求解器得到网格边界处的F和G。下面以x方向为例,列出HLL求解器的表达式:
F
=
{
F
L
,
s
L
≥
0
F
∗
,
s
L
<
0
<
s
R
F
R
,
s
R
≤
0
F
∗
=
s
R
F
L
−
s
L
F
R
+
s
L
s
R
(
U
R
−
U
L
)
s
R
−
s
L
s
L
=
m
i
n
(
u
L
−
g
h
L
,
u
s
−
g
h
s
)
s
R
=
m
i
n
(
u
R
+
g
h
R
,
u
s
+
g
h
s
)
u
s
=
1
2
(
u
L
+
u
R
)
+
g
h
L
−
g
h
R
g
h
s
=
g
h
L
+
g
h
R
2
+
u
L
+
u
R
4
\bold{F} = \begin{cases} \bold{F}_L,\quad& s_L \geq 0 \\ \bold{F}^*,\quad& s_L <0<s_R\\ \bold{F}_R,\quad& s_R \leq 0 \end{cases} \\[6pt] \bold{F}^* = \dfrac{s_R\bold{F}_L-s_L\bold{F}_R + s_L s_R(\bold{U}_R-\bold{U}_L)}{s_R-s_L}\\[6pt] s_L = min(u_L-\sqrt{gh_L},u_s-\sqrt{gh_s})\\[6pt] s_R = min(u_R+\sqrt{gh_R},u_s+\sqrt{gh_s})\\[6pt] u_s = \dfrac{1}{2} (u_L + u_R)+\sqrt{gh_L}-\sqrt{gh_R}\\[6pt] \sqrt{gh_s} = \dfrac{\sqrt{gh_L}+\sqrt{gh_R}}{2} + \dfrac{u_L+u_R}{4}
F=⎩
⎨
⎧FL,F∗,FR,sL≥0sL<0<sRsR≤0F∗=sR−sLsRFL−sLFR+sLsR(UR−UL)sL=min(uL−ghL,us−ghs)sR=min(uR+ghR,us+ghs)us=21(uL+uR)+ghL−ghRghs=2ghL+ghR+4uL+uR
边界条件
本模型涉及了三边界条件,一是入流边界,二是水位边界,三是固壁边界(采用free-slip边界)。这两个边界的在《【CFD小工坊】浅水模型的边界条件》中有介绍。
我们以右侧边界M+1/2为例,此网格左侧水深hL、法向流速uL,以及右侧水深h* 、法向流速u*满足:
u
L
+
2
c
L
=
u
∗
+
2
c
∗
c
L
=
g
h
L
,
c
∗
=
g
h
∗
u_L+2c_L = u^* + 2c^*\\[6pt] c_L = \sqrt{gh_L},c^* = \sqrt{gh^*}
uL+2cL=u∗+2c∗cL=ghL,c∗=gh∗
当采用流量边界时,右侧网格的单宽流量q被指定,即
q
=
h
∗
u
∗
q=h^*u^*
q=h∗u∗已知,则有:
u
L
+
2
c
L
=
u
∗
+
2
c
∗
=
q
h
∗
+
2
g
h
∗
=
q
c
∗
2
/
g
+
2
g
h
∗
u_L+2c_L = u^* + 2c^* = \dfrac{q}{h^*} + 2\sqrt{gh^*} = \dfrac{q}{{c^*}^2/g} + 2\sqrt{gh^*}
uL+2cL=u∗+2c∗=h∗q+2gh∗=c∗2/gq+2gh∗
化简后,上述方程为
c
∗
c^*
c∗的一元三次方程:
2
c
∗
3
−
(
u
L
+
2
g
h
L
)
c
∗
2
+
g
q
=
0
2{c^*}^3 - (u_L + 2\sqrt{gh_L}){c^*}^2 + gq = 0
2c∗3−(uL+2ghL)c∗2+gq=0
求出方程c^*后,所有的物理量都能被指定。
对于水位边界,边界处的h*被指定,则有
u
∗
=
u
L
∗
+
2
c
L
−
2
c
∗
=
u
L
∗
+
2
g
h
L
−
2
g
h
∗
u^* = u_L^*+2c_L - 2c^*=u_L^*+ 2\sqrt{gh_L} -2\sqrt{gh^*}
u∗=uL∗+2cL−2c∗=uL∗+2ghL−2gh∗
对于固壁边界,法向速度和通量被定义为0。在求解过程中,可设置h* = hL。
代码框架与关键代码
我的模型代码主要分为五个部分:
- 参数设置:设置物理参数、网格参数、时间参数等。代码如下所示:
grav = 9.81; % Gravitational acceleration
rho = 1000; % Density
CFL = 0.5; % Courant Number
Lx = 10000; % Length of the domain
Ly = 5000; % Width of the domain
n = 0.02; % Manning coefficient
zb0 = 0.0; % Bottom elevation
eta0 = 2.0; % Initial water elevation
h0 = 2.0; % Initial water depth
dx = 25; % Grid spacing
dy = 25; % Grid spacing
dt = 0.2; % Time spacing at the first step
dtmax = 4.0; % allowed max time step (s)
tend = 3600; % End of the simulation time
plot_int = 60; % Time interval to next plot
Q_in = 100; % Total discharge of the inlets
eta_out = 2.0; % Specified water level of the outlet
我设置网格为边长25m的正方形,底高程为zb0=0.0,初始水位与出口水位一致,即eta0 = 2.0。Courant数设置为0.5,初始时间步为0.2s,之后的每一个时间步通过CFL条件计算得到。
- 网格构建:网格有两个要素需要定义,一是网格的四个节点(Xp和Yp),二是网格的中心点(Xc和Yc);网格中心点也即水力物理量定义的位置。
%% Construct the grid
Nx = Lx/dx; Ny = Ly/dy;
xp = [0:dx:Lx]; % Points
yp = [0:dy:Ly];
xc = [0.5:dx:Lx]; % Cell centers
yc = [0.5:dy:Ly];
[Xp Yp] = meshgrid(xp, yp);
[Xc Yc] = meshgrid(xc, yc);
- 初始化:设置底高程zb,计算zb的梯度zbx和zby;之后再设置初始流速u、v为零。
%% Initialization
zbc = zb0 * ones(Ny,Nx);
zbp = zb0 * ones(Ny+1,Nx+1);
zbx = (0.5*(zbp(1:end-1,2:end)+zbp(2:end,2:end)) - ...
0.5*(zbp(1:end-1,1:end-1)+zbp(2:end,1:end-1)) ) /dx;
zby = (0.5*(zbp(2:end,1:end-1)+zbp(2:end,2:end)) - ...
0.5*(zbp(1:end-1,1:end-1)+zbp(1:end-1,2:end)) ) /dy;
eta = eta0 * ones(Ny,Nx);
h = eta - zbc;
u = zeros(Ny,Nx); v = zeros(Ny,Nx);
- 主循环:(1)计算网格边界处的水位、水深、流速值;(2)设置边界条件;(3)计算通量项FL、FR、GL和GR;(4)利用HLL求解通量F和G;(5)计算源项S;(6)计算新一个时间步的eta、h、u和v。
%% Main Loop
t = 0;
tplot = 0;
while(t<tend)
% estimate the dt
dtx = dx./(abs(u)+sqrt(grav*h) + 1E-8);
dty = dy./(abs(v)+sqrt(grav*h) + 1E-8);
dt1 = min(min(dtx,[],"all"), min(dty,[],"all"));
dt = min(dtmax, CFL*dt1);
clear dt1 dtx dty
etan = eta; hn = h;
un = u; vn = v;
% 2rd-order Runge-Kutta Method
for k = 1:2
% 1. reconstruct the flow data
% 1.1 x-direction reconstruction (Natural closed boundary)
e_ = [eta(:,1), eta, eta(:,end)];
u_ = [u(:,1), u, u(:,end)];
v_ = [v(:,1), v, v(:,end)];
de = minmod((e_(:,3:end)-e_(:,2:end-1))/dx, ...
(e_(:,2:end-1)-e_(:,1:end-2))/dx);
du = minmod((u_(:,3:end)-u_(:,2:end-1))/dx, ...
(u_(:,2:end-1)-u_(:,1:end-2))/dx);
dv = minmod((v_(:,3:end)-v_(:,2:end-1))/dx, ...
(v_(:,2:end-1)-v_(:,1:end-2))/dx);
exL = [eta(:,1), eta+0.5*dx*de];
exR = [eta-0.5*dx*de, eta(:,end)];
hxL = exL - 0.5*(zbp(1:end-1,:) + zbp(2:end,:));
hxR = exR - 0.5*(zbp(1:end-1,:) + zbp(2:end,:));
uxL = [u(:,1), u+0.5*dx*du];
uxR = [u-0.5*dx*du, u(:,end)];
vxL = [v(:,1), v+0.5*dx*dv];
vxR = [v-0.5*dx*dv, v(:,end)];
clear e_ u_ v_ de du dv
% 1.2 y-direction reconstruction (Natural closed boundary)
e_ = [eta(1,:); eta; eta(end,:)];
u_ = [u(1,:); u; u(end,:)];
v_ = [v(1,:); v; v(end,:)];
de = minmod((e_(3:end,:)-e_(2:end-1,:))/dy, ...
(e_(2:end-1,:)-e_(1:end-2,:))/dy);
du = minmod((u_(3:end,:)-u_(2:end-1,:))/dy, ...
(u_(2:end-1,:)-u_(1:end-2,:))/dy);
dv = minmod((v_(3:end,:)-v_(2:end-1,:))/dy, ...
(v_(2:end-1,:)-v_(1:end-2,:))/dy);
eyL = [eta(1,:); eta+0.5*dy*de];
eyR = [eta-0.5*dy*de; eta(end,:)];
hyL = eyL - 0.5*(zbp(:,1:end-1) + zbp(:,2:end));
hyR = eyR - 0.5*(zbp(:,1:end-1) + zbp(:,2:end));
uyL = [u(1,:); u+0.5*dy*du];
uyR = [u-0.5*dy*de; u(end,:)];
vyL = [v(1,:); v+0.5*dy*dv];
vyR = [v-0.5*dy*dv; v(end,:)];
clear e_ u_ v_ de du dv
% 2. boundary conditions
q = Q_in/100;
% 2.1. west boundary (inflow)
ff = find((yc>2450).*(yc<2550));
for j = ff
c_s = Equ3Iter(2.0, -uxR(j,1)-2*sqrt(grav*hxR(j,1)), 0, grav*q, ...
sqrt(grav*hxR(j,1)));
h_s = c_s.^2/grav; u_s = q/h_s;
hxL(j,1) = h_s; uxL(j,1) = u_s;
exL(j,1) = h_s + 0.5*(zbp(j,1)+zbp(j+1,1));
vxL(j,1) = 0.0;
end
% 2.2. east boundary (outflow)
ff = find((yc>1450).*(yc<1550));
for j = ff
h_s = eta_out - 0.5*(zbp(j,end)+zbp(j+1,end));
u_s = uxL(j,end) + 2*sqrt(grav*hxL(j,end)) - 2*sqrt(grav*h_s);
hxR(j,end) = h_s; uxR(j,end) = u_s;
exR(j,end) = h_s + 0.5*(zbp(j,end)+zbp(j+1,end));
vxR(j,end) = 0.0;
end
% 2.3. south boundary (inflow)
ff = find((xc>1950).*(xc<2050));
for i = ff
c_s = Equ3Iter(2.0, -vyR(1,i)-2*sqrt(grav*hyR(1,i)), 0, grav*q, ...
sqrt(grav*hyR(1,i)));
h_s = c_s.^2/grav; u_s = q/h_s;
hyL(1,i) = h_s; vyL(1,i) = u_s;
eyL(1,i) = h_s + 0.5*(zbp(1,i)+zbp(1,i+1));
uyL(1,i) = 0.0;
end
% 2.4. north boundary (inflow)
ff = find((xc>3950).*(xc<4050));
for i = ff
c_s = Equ3Iter(2.0, -vyL(end,i)-2*sqrt(grav*hyL(end,i)), 0, -grav*q, ...
sqrt(grav*hyL(end,i)));
h_s = c_s.^2/grav; u_s = q/h_s;
hyR(end,i) = h_s; vyR(end,i) = -u_s;
eyR(end,i) = h_s + 0.5*(zbp(end,i)+zbp(end,i+1));
uyR(end,i) = 0.0;
end
clear u_s h_s ff j i
% 3. flux terms (F and G)
F1L = hxL.*uxL;
F2L = hxL.*uxL.*uxL + 0.5*grav*(exL.*exL - ...
exL.*(zbp(1:end-1,:)+zbp(2:end,:)));
F3L = hxL.*uxL.*vxL;
F1R = hxR.*uxR;
F2R = hxR.*uxR.*uxR + 0.5*grav*(exR.*exR - ...
exR.*(zbp(1:end-1,:)+zbp(2:end,:)));
F3R = hxR.*uxR.*vxR;
G1L = hyL.*vyL;
G2L = hyL.*uyL.*vyL;
G3L = hyL.*vyL.*vyL + 0.5*grav*(eyL.*eyL - ...
eyL.*(zbp(:,1:end-1)+zbp(:,2:end)));
G1R = hyR.*vyR;
G2R = hyR.*uyR.*vyR;
G3R = hyR.*vyR.*vyR + 0.5*grav*(eyR.*eyR - ...
eyR.*(zbp(:,1:end-1)+zbp(:,2:end)));
% 4. calculate the flux by HLL
[sxL sxR] = WaveSpeed(hxL, hxR, uxL, uxR);
F1 = HLLSolver(F1L, F1R, sxL,sxR, exL,exR);
F2 = HLLSolver(F2L, F2R, sxL,sxR, hxL.*uxL,hxR.*uxR);
F3 = HLLSolver(F3L, F3R, sxL,sxR, hxL.*vxL,hxR.*vxR);
[syL syR] = WaveSpeed(hyL, hyR, vyL, vyR);
G1 = HLLSolver(G1L, G1R, syL,syR, eyL,eyR);
G2 = HLLSolver(G2L, G2R, syL,syR, hyL.*uyL,hyR.*uyR);
G3 = HLLSolver(G3L, G3R, syL,syR, hyL.*vyL,hyR.*vyR);
clear sxL sxR syL syR F1L F1R F2L F2R F3L F3R G1L G1R G2L G2R G3L G3R
% 4.1. west boundary
F1(:,1) = 0; F3(:,1) = 0;
F2(:,1) = 0.5*grav*(exR(:,1).^2 - exR(:,1).*(zbp(1:end-1,1)+zbp(2:end,1)));
% inflow
ff = find((yc>2450).*(yc<2550));
F1(ff,1) = hxL(ff,1).*uxL(ff,1);
F2(ff,1) = F2(ff,1) + hxL(ff,1).*uxL(ff,1).*uxL(ff,1);
F3(ff,1) = hxL(ff,1).*uxL(ff,1).*vxL(ff,1);
% 4.2. east boundary
F1(:,end) = 0; F3(:,end) = 0;
F2(:,end) = 0.5*grav*(exL(:,end).^2 - exL(:,end).*(zbp(1:end-1,end)+zbp(2:end,end)));
% outflow
ff = find((yc>1450).*(yc<1550));
F1(ff,end) = hxR(ff,end).*uxR(ff,end);
F2(ff,end) = F2(ff,end) + hxR(ff,end).*uxR(ff,end).*uxR(ff,end);
F3(ff,end) = hxR(ff,end).*uxR(ff,end).*vxR(ff,end);
% 4.3. south boundary
G1(1,:) = 0; G2(1,:) = 0;
G3(1,:) = 0.5*grav*(eyR(1,:).^2 - eyR(1,:).*(zbp(1,1:end-1)+zbp(1,2:end)));
% inflow
ff = find((xc>1950).*(xc<2050));
G1(1,ff) = hyL(1,ff).*vyL(1,ff);
G2(1,ff) = hyL(1,ff).*uyL(1,ff).*vyL(1,ff);
G3(1,ff) = G3(1,ff) + hyL(1,ff).*vyL(1,ff).*vyL(1,ff);
% 4.4. north boundary
G1(end,:) = 0; G2(end,:) = 0;
G3(end,:) = 0.5*grav*(eyL(end,:).^2 - eyL(end,:).*(zbp(end,1:end-1)+zbp(end,2:end)));
% inflow
ff = find((xc>3950).*(xc<4050));
G1(end,ff) = hyR(end,ff).*vyR(end,ff);
G2(end,ff) = hyR(end,ff).*uyR(end,ff).*vyR(end,ff);
G3(end,ff) = G3(end,ff) + hyR(end,ff).*vyR(end,ff).*vyR(end,ff);
clear ff exL exR eyL eyR hxL hxR hyL hyR uxL uxR uyL uyR vxL vxR vyL vyR
% 5. source terms
Cf = grav * n.^2 .* h.^(-1/3);
tau_x = rho*Cf.* u .*sqrt(u.*u + v.*v);
tau_y = rho*Cf.* v .*sqrt(u.*u + v.*v);
S1 = zeros(Ny,Nx);
S2 = -tau_x/rho - grav*eta.*zbx;
S3 = -tau_y/rho - grav*eta.*zby;
% 6. time step
% 6.1 solve eta
eta = eta - dt/dx*(F1(:,2:end)-F1(:,1:end-1)) ...
- dt/dy*(G1(2:end,:)-G1(1:end-1,:)) + dt*S1;
% 6.2 solve h*u
hu = h.*u - dt/dx*(F2(:,2:end)-F2(:,1:end-1)) ...
- dt/dy*(G2(2:end,:)-G2(1:end-1,:)) + dt*S2;
% 6.3 solve h*v
hv = h.*v - dt/dx*(F3(:,2:end)-F3(:,1:end-1)) ...
- dt/dy*(G3(2:end,:)-G3(1:end-1,:)) + dt*S3;
h = eta - zbc;
u = hu./h;
v = hv./h;
clear hu hv k
end
t = t+dt;
eta = 0.5*(eta + etan);
h = eta - zbc;
u = 0.5*(u + un);
v = 0.5*(v + vn);
clear etan hn un vn
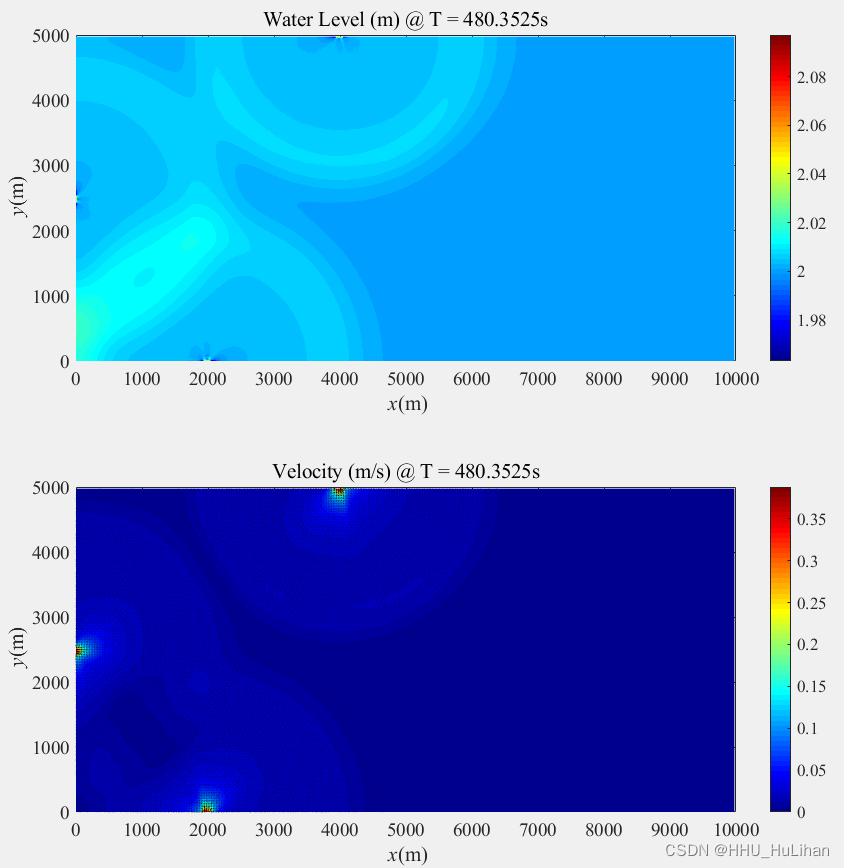
% 7. plot
disp(['T = ' num2str(t) 's now.']);
if (t >= plot_int*tplot)
figure(1)
set(gcf,'position',[962,42,958,953]);
subplot(2,1,1)
axis([0 Lx 0 Ly])
pcolor(Xc, Yc, eta), shading interp, colormap jet, colorbar, hold on
% quiver(Xc, Yc, u, v, 'w')
title(['Water Level (m) @ T = ' num2str(t) 's'])
set(gca,'FontName','Times New Roman','FontSize',14)
subplot(2,1,2)
axis([0 Lx 0 Ly])
pcolor(Xc, Yc, sqrt(u.*u+v.*v)), shading interp, colormap jet, colorbar, hold on
quiver(Xc, Yc, u, v, 'w')
title(['Velocity (m/s) @ T = ' num2str(t) 's'])
set(gca,'FontName','Times New Roman','FontSize',14)
tplot = tplot + 1;
end
end
- 其余子函数:包括minmod限制器、HLL求解器、一元三次方程求解器Equ3Iter等。
结果展示
写在最后
- 这个代码可以运行,但是总体上计算的并不快。我不知道是不是matlab编译器本身的原因。如果有用别的代码进行尝试的朋友,可以留言说说你们的计算速度如何。
- 实际的入流边界条件远比我考虑的复杂,首先要考虑是临界流还是亚临界流,而本模型默认用亚临界流的入流条件;其次,我将入流边界处的流速设定为均匀分布的,这不一定符合实际,可能用下列公式更好。
流量边界条件:
对于这m条边界上的总流量
Q
Q
Q,某一网格
i
i
i边上的单宽流量
q
i
q_i
qi是:
q
i
=
L
i
′
h
i
1.5
C
i
∑
k
=
1
m
L
k
′
h
k
1.5
C
k
Q
q_i = \dfrac{L'_i h_i^{1.5}C_i}{\sum^{m}_{k=1} L'_k h_k^{1.5}C_k} Q
qi=∑k=1mLk′hk1.5CkLi′hi1.5CiQ
式中,
L
′
L'
L′表示流量边界对应网格边的边长,
h
h
h表示对应网格的水深,
C
C
C表示对应网格的摩阻力项,有
C
=
h
1
/
6
n
C = \dfrac{h^{1/6}}{n}
C=nh1/6,n为曼宁系数。之后根据求出的单宽流量,依次处理每个边界网格的通量值。
Liang Q , Marche F .Numerical resolution of well-balanced shallow water equations with complex source terms[J].Advances in Water Resources, 2009, 32(6):873-884.DOI:10.1016/j.advwatres.2009.02.010. ↩︎