一、概述
时域法是一种直接在时间域中对系统进行分析和校正的方法。
- 优点:可以提供系统时间响应的全部信息,直观、准确。
- 缺点:研究系统参数改变引起系统性能指标变化的趋势,及对系统进行校正设计时,时域法不是非常方便。
系统的时域性能指标:
- 动态性能指标:延迟时间,上升时间,峰值时间,调节时间,超调量。
- 稳态性能指标:稳态误差。
二、一阶系统的时间响应及动态性能
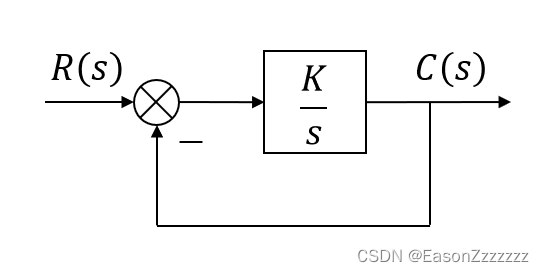
系统的传递函数为:
Φ
(
s
)
=
1
T
s
+
1
\Phi (s)=\frac{1}{Ts+1}
Φ(s)=Ts+11
系统单位阶跃响应的拉普拉斯变换为
C
(
s
)
=
Φ
(
s
)
⋅
R
(
s
)
=
1
T
s
+
1
⋅
1
s
=
1
s
−
1
s
+
1
/
T
C(s)=\Phi (s)\cdot R(s)=\frac{1}{Ts+1}\cdot \frac{1}{s}=\frac{1}{s} - \frac{1}{s+1/T}
C(s)=Φ(s)⋅R(s)=Ts+11⋅s1=s1−s+1/T1
单位阶跃响应
h
(
t
)
=
L
−
1
[
C
(
s
)
]
=
1
−
e
−
t
T
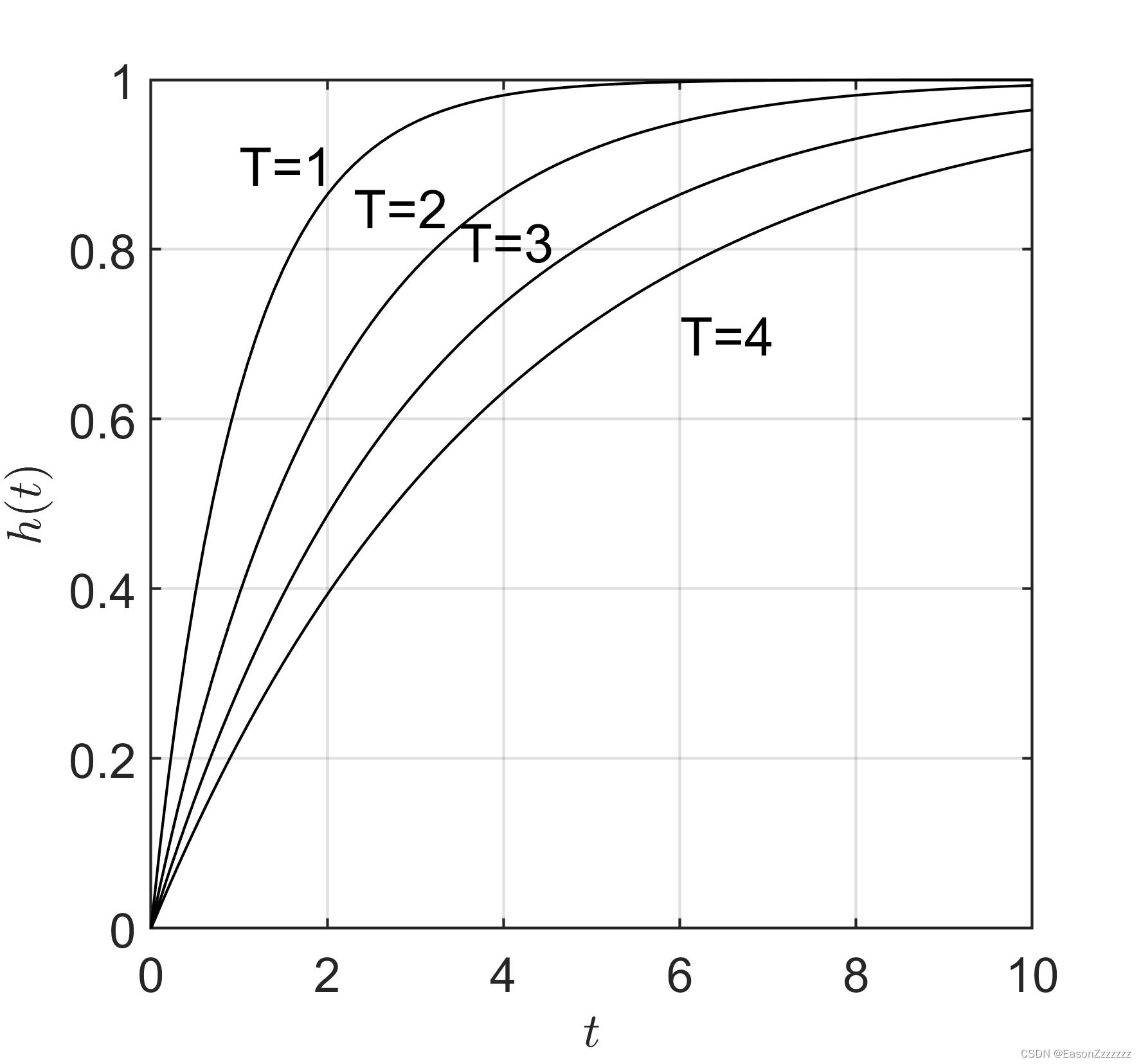
h(t)={\cal{L}}^{-1}[C(s)]=1-e^{-\frac{t}{T}}
h(t)=L−1[C(s)]=1−e−Tt
令
h
(
t
s
)
=
1
−
e
−
t
s
T
=
0.95
h(t_s)=1-e^{-\frac{t_s}{T}}=0.95
h(ts)=1−e−Tts=0.95
解得调节时间为
t
s
=
3
T
t_s=3T
ts=3T
三、二阶系统的时间响应及动态性能
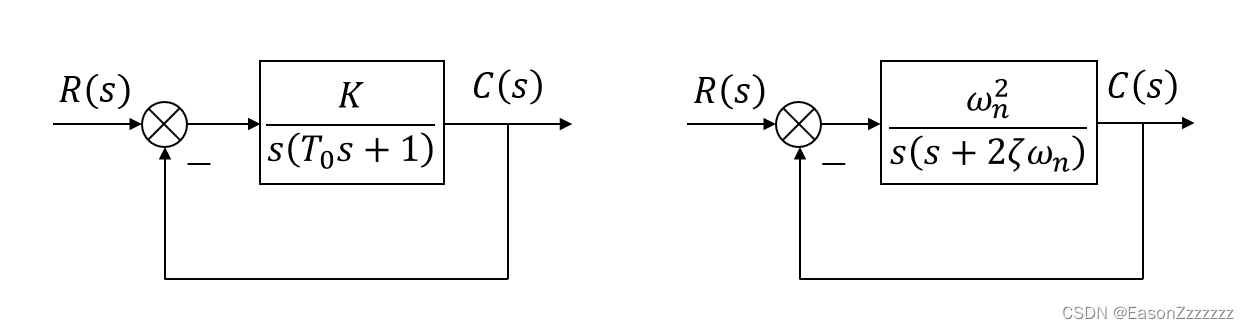
系统传递函数标准形式为:
Φ
(
s
)
=
ω
n
2
s
2
+
2
ζ
ω
n
s
+
ω
n
2
(
首
1
型
)
=
1
T
2
s
2
+
2
T
ζ
s
+
1
(
尾
1
型
)
\Phi (s)=\frac{\omega_n^2}{s^2+2\zeta\omega_n s+\omega_n^2}(首1型)=\frac{1}{T^2s^2+2T\zeta s+1}(尾1型)
Φ(s)=s2+2ζωns+ωn2ωn2(首1型)=T2s2+2Tζs+11(尾1型)
其中, T = T 0 K , ω n = 1 T = K T 0 , ζ = 1 2 1 K T 0 T=\sqrt{\dfrac{T_0}{K}},\omega_n=\dfrac{1}{T}=\sqrt{\dfrac{K}{T_0}},\zeta=\dfrac{1}{2}\sqrt{\dfrac{1}{KT_0}} T=KT0,ωn=T1=T0K,ζ=21KT01。 ζ , ω n \zeta,\omega_n ζ,ωn 分别称为系统的阻尼比和无阻尼自然频率。
二阶系统闭环特征方程为
D
(
s
)
=
s
2
+
2
ζ
ω
n
s
+
ω
n
2
=
0
D(s)=s^2+2\zeta\omega_ns+\omega_n^2=0
D(s)=s2+2ζωns+ωn2=0
其特征根为
λ
1
,
2
=
−
ζ
ω
n
±
ω
n
ζ
2
−
1
\lambda_{1,2}=-\zeta\omega_n\pm\omega_n\sqrt{\zeta^2-1}
λ1,2=−ζωn±ωnζ2−1
当 ζ > 1 \zeta>1 ζ>1 系统为过阻尼,当 ζ = 1 \zeta=1 ζ=1 系统为临界阻尼,当 0 < ζ < 1 0<\zeta<1 0<ζ<1 系统为欠阻尼,当 ζ = 0 \zeta=0 ζ=0 系统为零阻尼。
3.1 过阻尼二阶系统动态性能指标计算
设过阻尼二阶系统的极点为
λ
1
=
−
1
T
1
=
−
(
ζ
−
ζ
2
−
1
)
ω
n
λ
2
=
−
1
T
2
=
−
(
ζ
+
ζ
2
−
1
)
ω
n
(
T
1
>
T
2
)
\lambda_1=-\frac{1}{T_1}=-(\zeta-\sqrt{\zeta^2-1})\omega_n\quad\lambda_2=-\frac{1}{T_2}=-(\zeta+\sqrt{\zeta^2-1})\omega_n\quad(T_1>T_2)
λ1=−T11=−(ζ−ζ2−1)ωnλ2=−T21=−(ζ+ζ2−1)ωn(T1>T2)
系统单位阶跃响应的拉普拉斯变换
C
(
s
)
=
Φ
(
s
)
R
(
s
)
=
ω
n
2
(
s
+
1
/
T
1
)
(
s
+
1
/
T
2
)
1
s
C(s)=\Phi(s)R(s)=\frac{\omega_n^2}{(s+1/T_1)(s+1/T_2)}\frac{1}{s}
C(s)=Φ(s)R(s)=(s+1/T1)(s+1/T2)ωn2s1
进行拉普拉斯反变换,得出系统单位阶跃响应
h
(
t
)
=
1
+
e
−
t
T
1
T
2
T
1
−
1
+
e
−
t
T
2
T
1
T
2
−
1
(
t
≥
0
)
h(t)=1+\frac{e^{-\frac{t}{T_1}}}{\dfrac{T_2}{T_1}-1}+\frac{e^{-\frac{t}{T_2}}}{\dfrac{T_1}{T_2}-1}\quad(t\geq0)
h(t)=1+T1T2−1e−T1t+T2T1−1e−T2t(t≥0)
当 T 1 / T 2 T_1/T_2 T1/T2 (或 ζ \zeta ζ)很大时,特征根 λ 2 = − 1 / T 2 \lambda_2=-1/T_2 λ2=−1/T2 比 λ 1 = − 1 / T 1 \lambda_1=-1/T_1 λ1=−1/T1 远离虚轴,模态 e − t / T 2 e^{-t/T_2} e−t/T2 很快衰减为零,系统调节时间主要由 λ 1 = − 1 / T 1 \lambda_1=-1/T_1 λ1=−1/T1 对应的模态 e − t / T 1 e^{-t/T_1} e−t/T1 决定。此时可将过阻尼二阶系统近似看作由 λ 1 \lambda_1 λ1 确定的一阶系统,估算其动态性能指标。
3.2 欠阻尼二阶系统动态性能指标计算
系统单位阶跃响应为
h
(
t
)
=
1
−
e
−
ζ
ω
n
t
1
−
ζ
2
sin
(
1
−
ζ
2
ω
n
t
+
arctan
1
−
ζ
2
ζ
)
h(t)=1-\frac{e^{-\zeta\omega_nt}}{\sqrt{1-\zeta^2}}\sin\Big(\sqrt{1-\zeta^2}\omega_nt+\arctan\frac{\sqrt{1-\zeta^2}}{\zeta}\Big)
h(t)=1−1−ζ2e−ζωntsin(1−ζ2ωnt+arctanζ1−ζ2)
- 峰值时间 t p = π 1 − ζ 2 ω n t_p=\dfrac{\pi}{\sqrt{1-\zeta^2}\omega_n} tp=1−ζ2ωnπ
- 超调量 σ % = e − ζ π 1 − ζ 2 × 100 % \sigma \%=e^{-\zeta\pi\sqrt{1-\zeta^2}}\times100 \% σ%=e−ζπ1−ζ2×100%
- 调节时间 t s ≈ 3.5 ζ ω n ( 0.3 < ζ < 0.8 ) t_s\approx\dfrac{3.5}{\zeta\omega_n}\quad(0.3<\zeta<0.8 ) ts≈ζωn3.5(0.3<ζ<0.8)
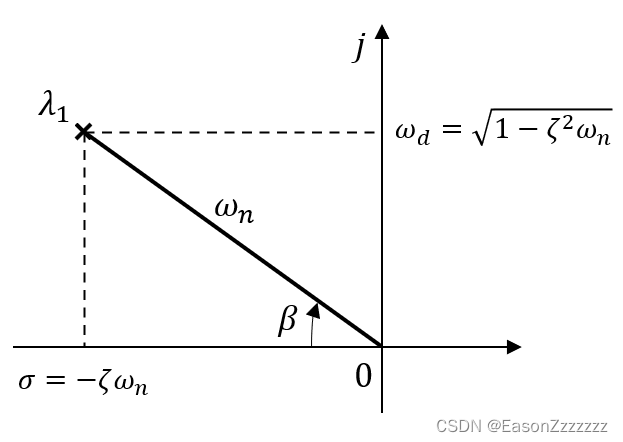
典型欠阻尼二阶系统动态性能、系统参数及极点分布之间的关系
{
σ
%
=
e
−
ζ
π
1
−
ζ
2
×
100
%
t
s
≈
3.5
ζ
ω
n
λ
1
,
2
=
σ
±
j
ω
d
=
−
ζ
ω
n
±
j
1
−
ζ
2
ω
n
\begin{cases} \sigma \%&=e^{-\zeta\pi\sqrt{1-\zeta^2}}\times100 \%\\[2ex] t_s&\approx\dfrac{3.5}{\zeta\omega_n}\\[2ex] \lambda_{1,2}&=\sigma\pm j\omega_d=-\zeta\omega_n\pm j\sqrt{1-\zeta^2}\omega_n \end{cases}
⎩
⎨
⎧σ%tsλ1,2=e−ζπ1−ζ2×100%≈ζωn3.5=σ±jωd=−ζωn±j1−ζ2ωn
- 当 ω n \omega_n ωn 固定, ζ \zeta ζ 增加( β \beta β 减小),系统超调量减小;同时由于极点远离虚轴,调节时间减小。
- 当 ζ \zeta ζ 固定, ω n \omega_n ωn 增加,系统超调量不变;由于极点远离虚轴,调节时间减小。
- 当
T
0
T_0
T0 固定,
K
K
K 增加,阻尼比变小,超调量增加。
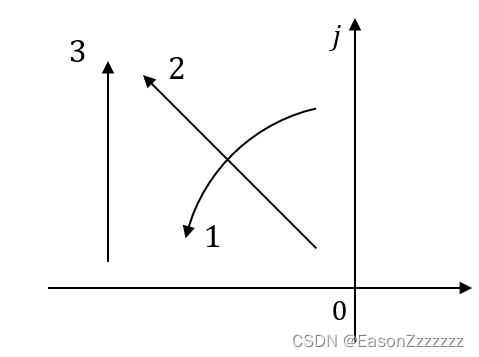
综上所述,要获得满意的系统动态性能,应该适当选择参数,使二阶系统的闭环极点位于 β = 4 5 ∘ \beta=45^\circ β=45∘ 线附近,使系统具有合适的超调量,并根据情况尽量使其远离虚轴,以提高系统的快速性。
3.3 改善二阶系统动态性能的措施
采用测速反馈和**比例加微分(PD)**控制方式,可以有效改善二阶系统的动态性能。
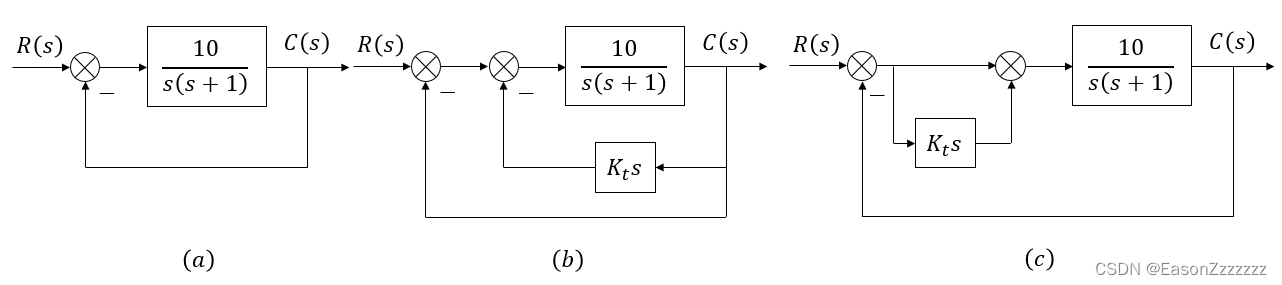
| 系统结构图 ( K t = 0.216 ) (K_t=0.216) (Kt=0.216) | 图 ( a ) (a) (a)原系统 | 图 ( b ) (b) (b)测速反馈 | 图 ( c ) (c) (c)比例+微分 |
|---|---|---|---|
| 开环传递函数 | G ( a ) ( s ) = 10 s ( s + 1 ) G_{(a)}(s)=\dfrac{10}{s(s+1)} G(a)(s)=s(s+1)10 | G ( b ) ( s ) = 10 s ( s + 1 + 10 K t ) G_{(b)}(s)=\dfrac{10}{s(s+1+10K_t)} G(b)(s)=s(s+1+10Kt)10 | G ( c ) ( s ) = 10 ( K t s + 1 ) s ( s + 1 ) G_{(c)}(s)=\dfrac{10(K_ts+1)}{s(s+1)} G(c)(s)=s(s+1)10(Kts+1) |
| 开环增益 | K ( a ) = 10 K_{(a)}=10 K(a)=10 | K ( b ) = 10 1 + 10 K t K_{(b)}=\dfrac{10}{1+10K_t} K(b)=1+10Kt10 | K ( c ) = 10 K_{(c)}=10 K(c)=10 |
| 闭环传递函数 | Φ ( a ) ( s ) = 10 s 2 + s + 10 \Phi_{(a)}(s)=\dfrac{10}{s^2+s+10} Φ(a)(s)=s2+s+1010 | Φ ( b ) ( s ) = 10 s 2 + ( 1 + 10 K t ) s + 10 \Phi_{(b)}(s)=\dfrac{10}{s^2+(1+10K_t)s+10} Φ(b)(s)=s2+(1+10Kt)s+1010 | Φ ( c ) ( s ) = 10 ( K t s + 1 ) s 2 + ( 1 + 10 K t ) s + 10 \Phi_{(c)}(s)=\dfrac{10(K_ts+1)}{s^2+(1+10K_t)s+10} Φ(c)(s)=s2+(1+10Kt)s+1010(Kts+1) |
| ζ \zeta ζ | 0.158 | 0.5 | 0.5 |
| ω n \omega_n ωn | 3.16 | 3.16 | 3.16 |
| 零点 | — | — | − 4.63 -4.63 −4.63 |
| 极点 | − 0.5 ± j 3.12 -0.5\pm j3.12 −0.5±j3.12 | − 1.58 ± j 2.74 -1.58\pm j2.74 −1.58±j2.74 | − 1.58 ± j 2.74 -1.58\pm j2.74 −1.58±j2.74 |
| t p t_p tp | 1.01 | 1.15 | 1.05 |
| σ % \sigma\% σ% | 60% | 16.3% | 23% |
| t s t_s ts | 7 | 2.2 | 2.1 |
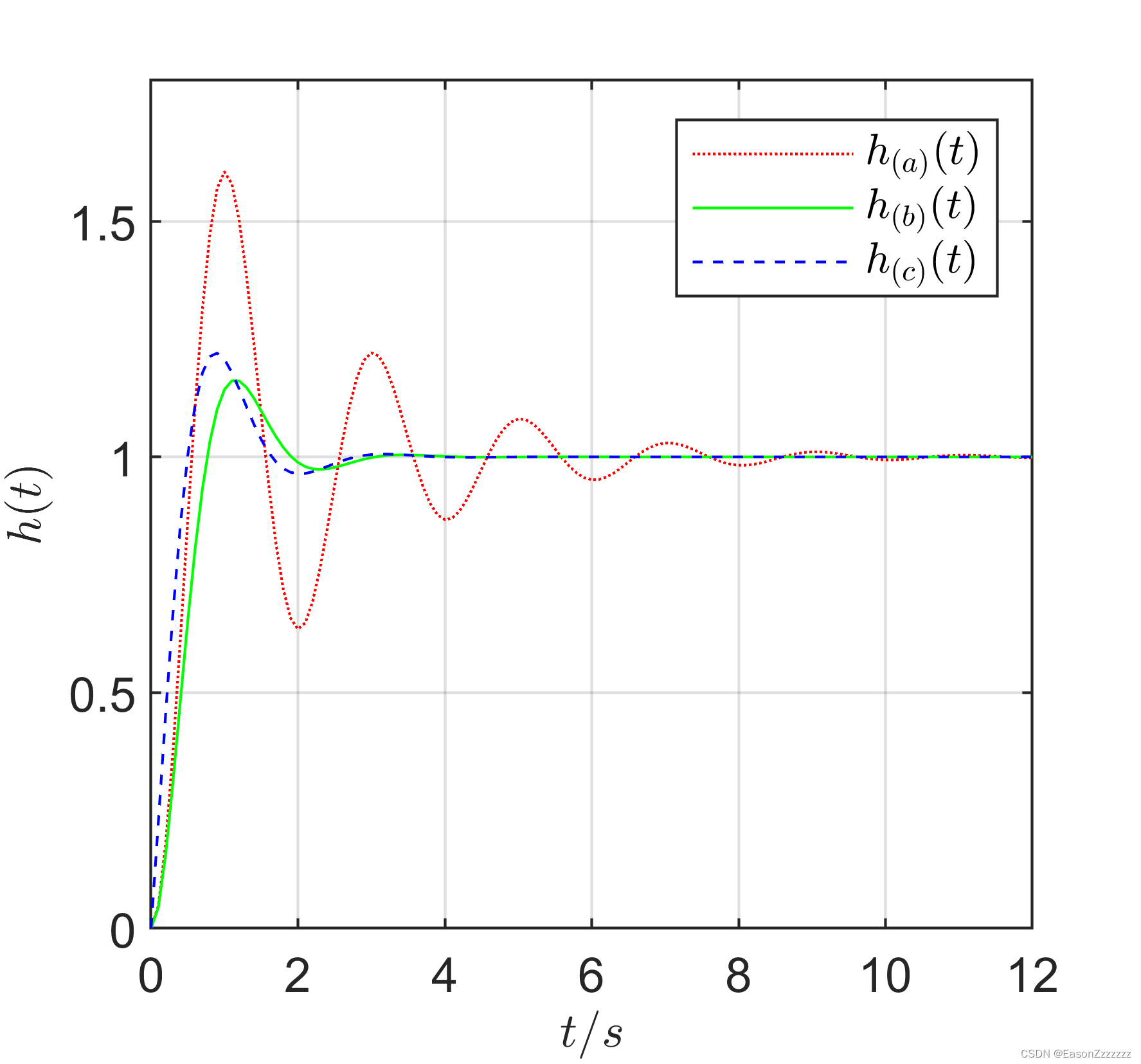
由于引入了测速反馈和PD控制,
(
b
)
(b)
(b) 和
(
c
)
(c)
(c) 所示系统的闭环极点较
(
a
)
(a)
(a) 所示系统闭环极点远离虚轴(相应调节时间小);且
β
\beta
β 减小(对应阻尼比较大,超调量较小)。因而动态性能优于图
(
a
)
(a)
(a) 所示系统。
比较 ( b ) (b) (b) 和 ( c ) (c) (c) 所示两系统,它们闭环传递函数的分母相同,只是后者较前者多一个闭环零点。附件闭环零点不会影响闭环极点,因而不会影响单位阶跃响应中的各模态。但它会改变单位阶跃响应中各模态的加权系数,由此影响系统的动态性能。
四、高阶系统的阶跃响应及动态性能
对稳定的闭环系统,远离虚轴的极点对应的模态因为收敛速度快,只影响阶跃响应的起始段,而距虚轴近的极点对应的模态衰减缓慢,系统动态性能主要取决于这些极点对应地响应分量。
距离虚轴最近而且附近又没有零点的极点对系统的动态性能起主导作用,称相应极点为主导极点。
一般规定,若某极点的实部大于主导极点实部的 5~6 倍以上时,则可以忽略相应分量的影响;若两相邻零、极点间的距离比它们本身的模值小一个数量级时,则称该零、极点为“偶极子”,其作用近似抵消,可以忽略相应分量的影响。
在绝大多数实际系统的闭环零、极点中,可以选留最靠近虚轴的一个或几个极点作为主导极点,略去比主导极点距虚轴远 5 倍以上的闭环零、极点,以及不十分接近虚轴的相互靠得很近(该零、极点距虚轴距离是其相互之间距离的10倍以上)的偶极子,忽略其对系统动态性能的影响。