文章目录
- 【Linux】Ubuntu20.04.5安装ROS1【教程】
- 写在前面,一些特别注意的点
- 安装步骤大纲
- 1.选择软件镜像源(可以省略,如果不成功再试这一步)
- 2.添加ROS软件源和密钥
- 3.安装ROS1
- 4.设置环境变量
- 5.安装rosinstall
- 6.检查安装是否成功
- Reference
【Linux】Ubuntu20.04.5安装ROS1【教程】
博主使用的Ubuntu版本是20.04.5LST,在安装的过程中遇到了不少的坑,写在这篇博客里,帮助大家避免这些坑。Ubuntu20.04.5的安装教程可以参考这篇博客,点击跳转。
写在前面,一些特别注意的点
- 1.在安装ros的时候使用手机热点,可以有效防止国内运营商的网络挟持,加快下载速度
- 2.一定要确保自己使用的Ubuntu版本是受ros支持的,博主一开始使用的是
Ubuntu20.04.1LST,这个版本是不受支持的,所以浪费了很多时间都没有安装成功,后面使用了Ubuntu20.04.5LST才顺利安装,具体的可以查看下面的表
| Ubuntu | 版本名称 | ROS1 |
|---|---|---|
| 14.04 LST | Trusty Tahr | indigo lgloo |
| 16.04 LST | Xenial Xerus | Kinetic Kame |
| 18.04 LST | Bionic Beaver | Melodic Morenia |
| 20.04.5 LST | Focal Fossa | Noetic Ninjemys(Recommended) |
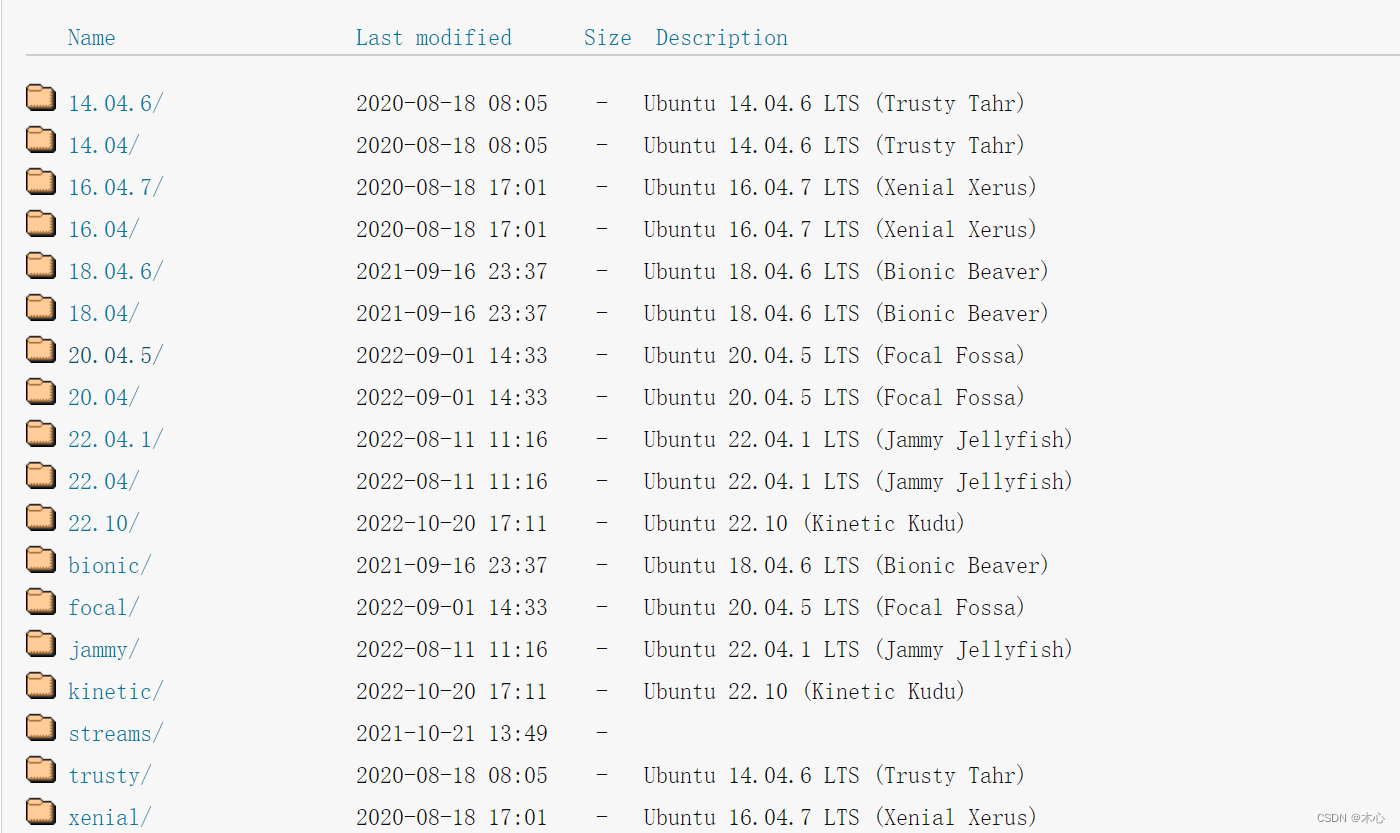
点击此处查看完整列表,从上表可以看出,Ubuntu20.04.1LST并不是主流的版本,所以ROS1不受支持。
安装步骤大纲
开始正式的安装之前,先了解一下安装的步骤,安装主要包括以下几个步骤:
- 1.选择软件镜像源
- 2.添加ROS软件源和密钥
- 3.安装ROS
- 4.设置环境变量
- 5.安装rosinstall
- 6.检查安装是否成功
可以直接参考ROSwiki官网(点击跳转)给出的步骤
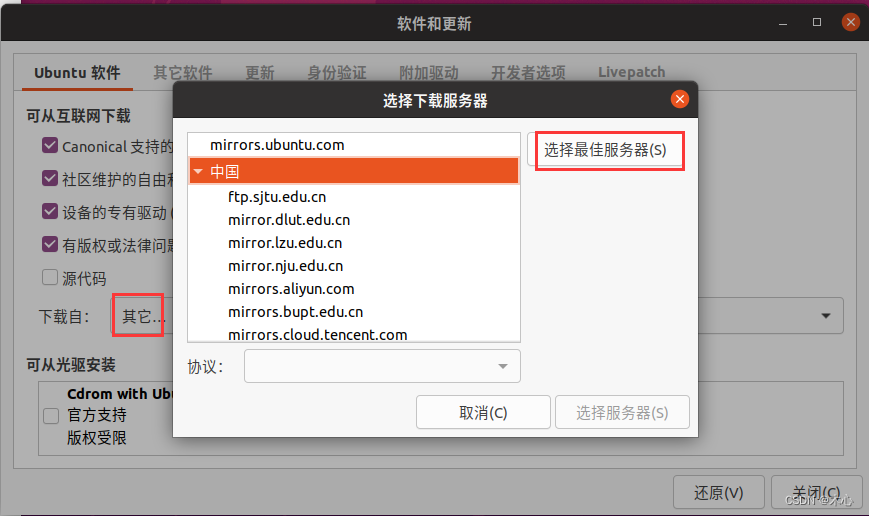
1.选择软件镜像源(可以省略,如果不成功再试这一步)
进入设置,然后进入软件更新
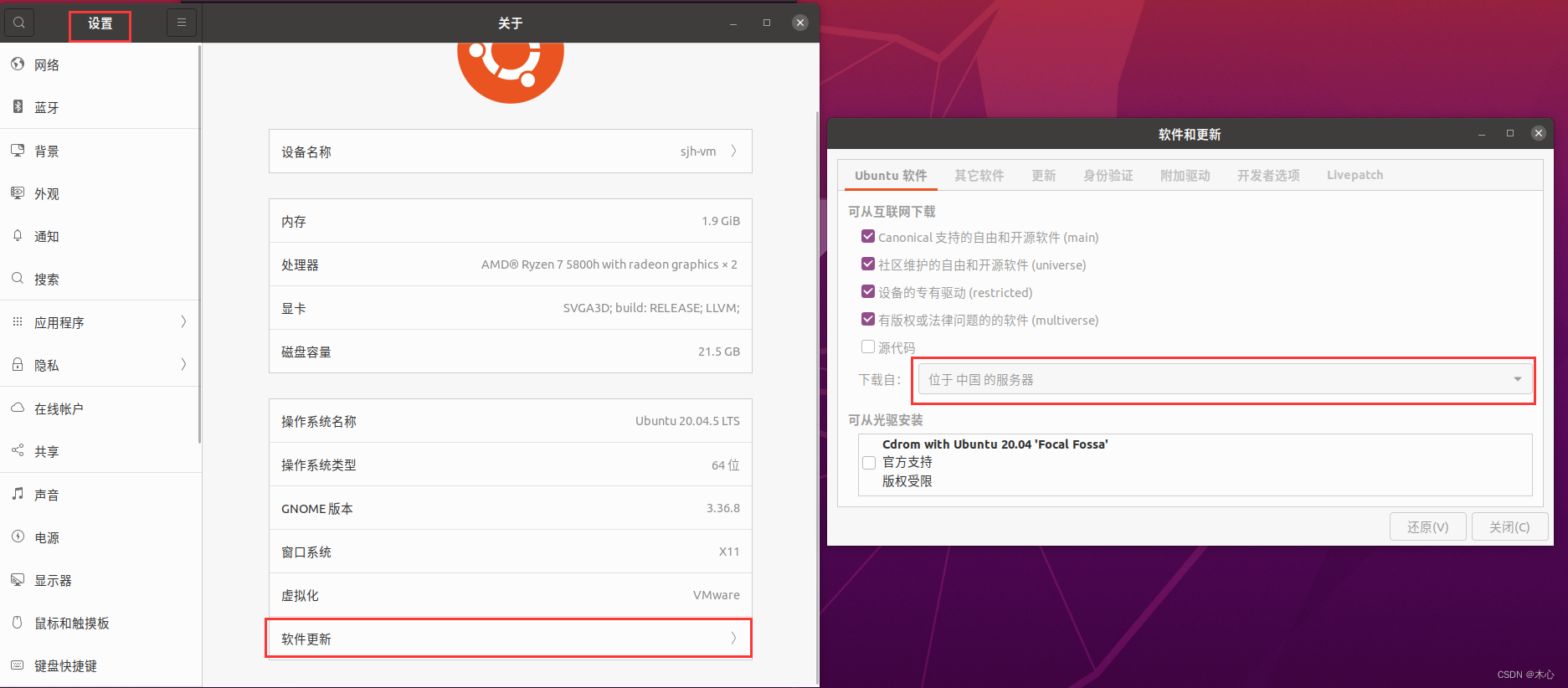
然后选择最佳服务器
2.添加ROS软件源和密钥
进入ROSwiki官网(点击跳转)后,选择ROS镜像源

这里由很多的镜像源,选择其中一个使用即可
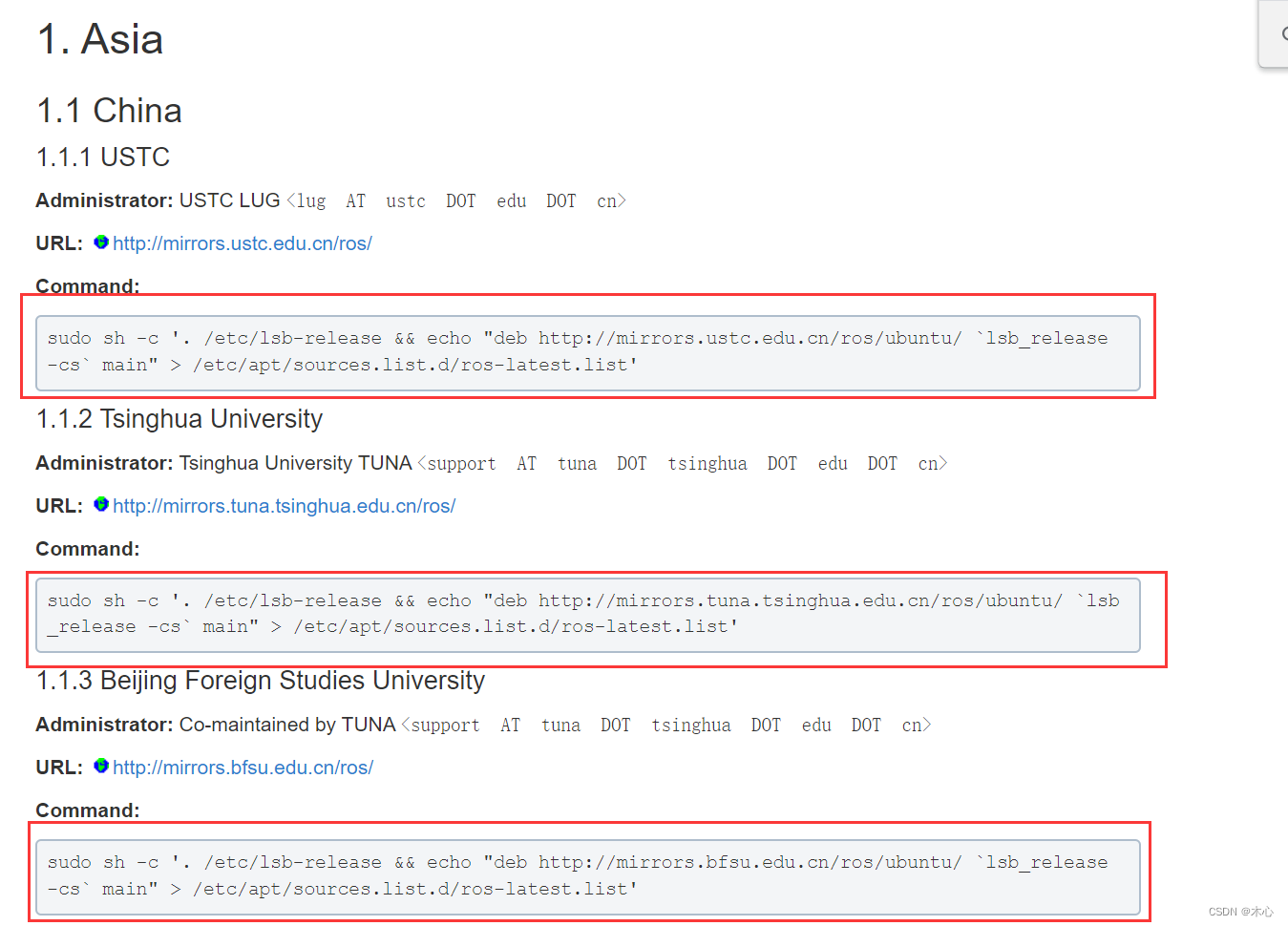
笔者使用的是USTC的镜像源,放在这里大家直接复制就好了
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
下面是TUNA的镜像源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
这两个镜像源选择其中一个就好
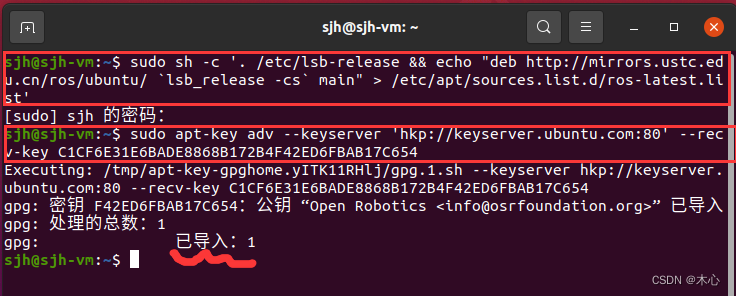
然后,给刚才设置的ROS源添加密钥
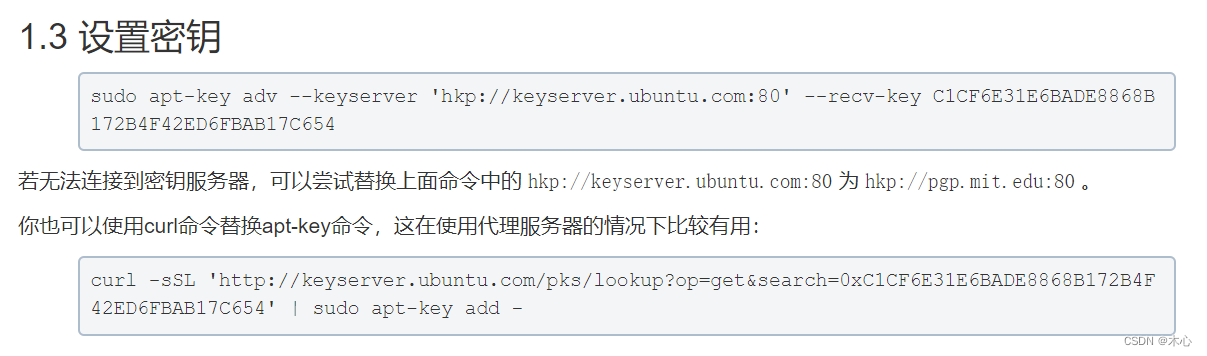
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
下面是设置完成的提示
3.安装ROS1

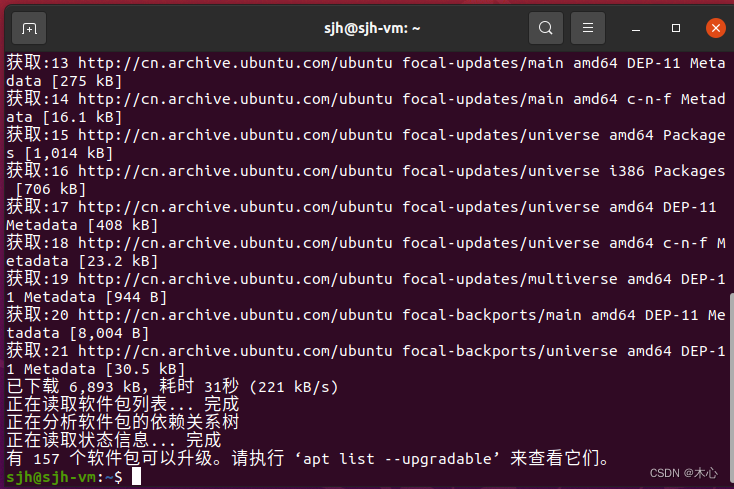
接下来,完成apt的更新,运行下一行代码
sudo apt update
耐心等待一段时间

成功完成更新
然后,正式开始安装,安装桌面完整版本
sudo apt install ros-noetic-desktop-full
耐心等待一段时间,请一定换成手机热点,不然真的很痛苦
没有报错,就是成功
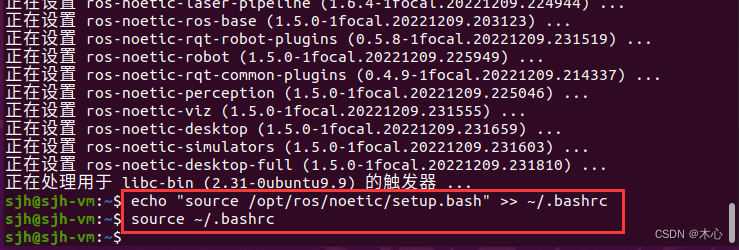
4.设置环境变量

设置环境变量如下
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
构建软件包的依赖项,上述步骤已经安装了运行核心ROS软件包所需的内容。要创建和管理您自己的ROS工作区,有各种工具和要求单独分发。
要安装此工具和其他构建ROS软件包的依赖项,请运行:
sudo apt-get install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
耐心等待一段时间,请一定换成手机热点,不然真的很痛苦
没有报错,就是成功
5.安装rosinstall
安装完成之后,初始化rosdep
这里需要安装rosdepc,这是国内大佬做的rosdep镜像,可以绕开连接不上服务器的困难过程。
sudo apt install python3-pip
耐心等待一段时间,请一定换成手机热点,不然真的很痛苦
没有报错,就是成功
在安装了pip之后,需要对其进行换源,使用国内源能够更快下载文件
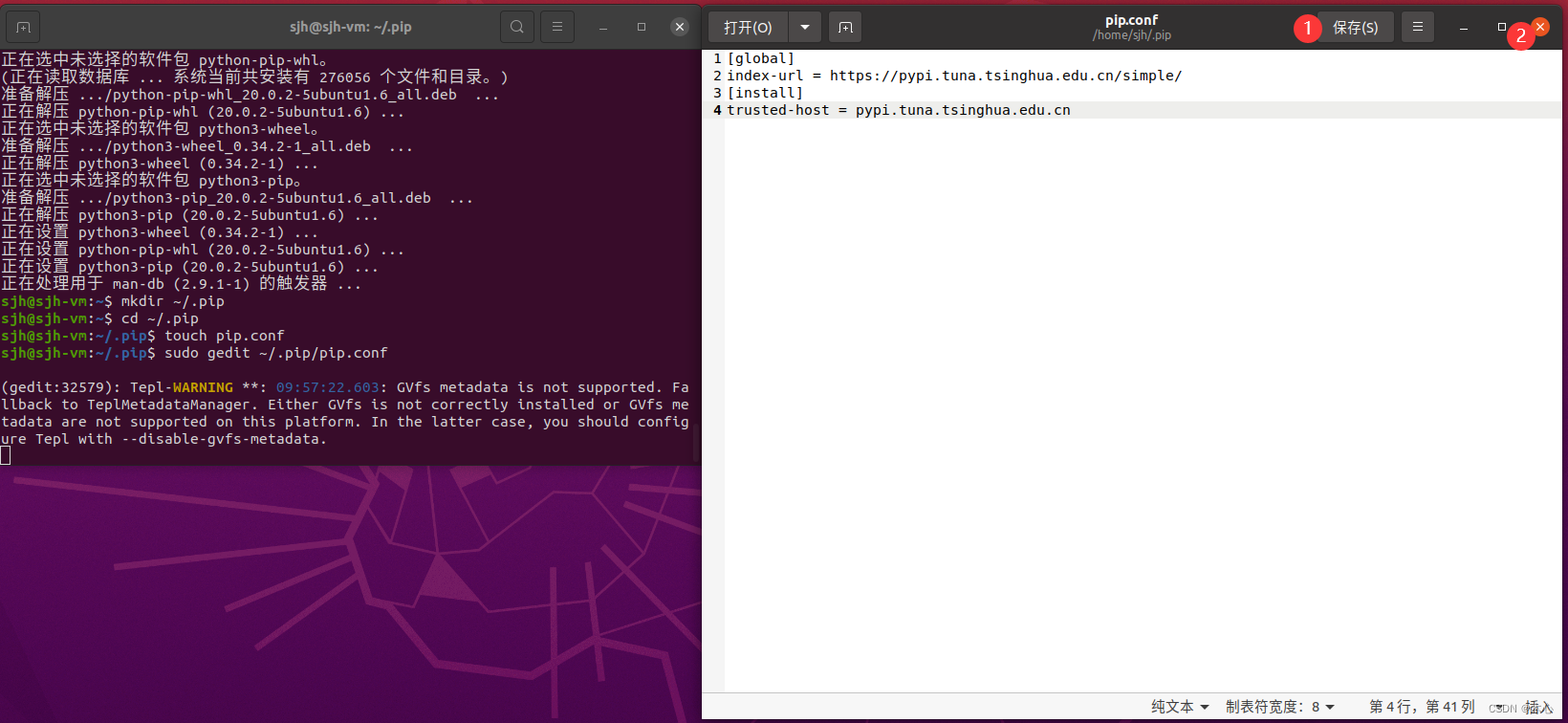
mkdir ~/.pip
cd ~/.pip
touch pip.conf
sudo gedit ~/.pip/pip.conf
在弹出的文件中写入,并保存
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple/
[install]
trusted-host = pypi.tuna.tsinghua.edu.cn
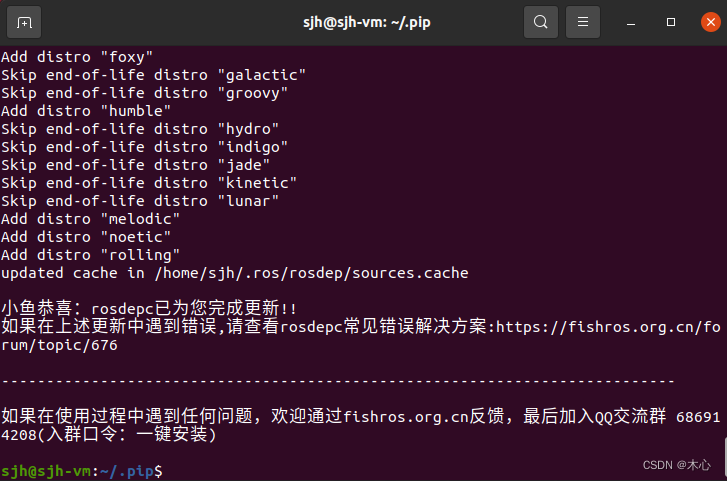
然后,安装rosdepc,执行初始化rosdepc,更新rosdepc
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
下面提示成功完成更新,
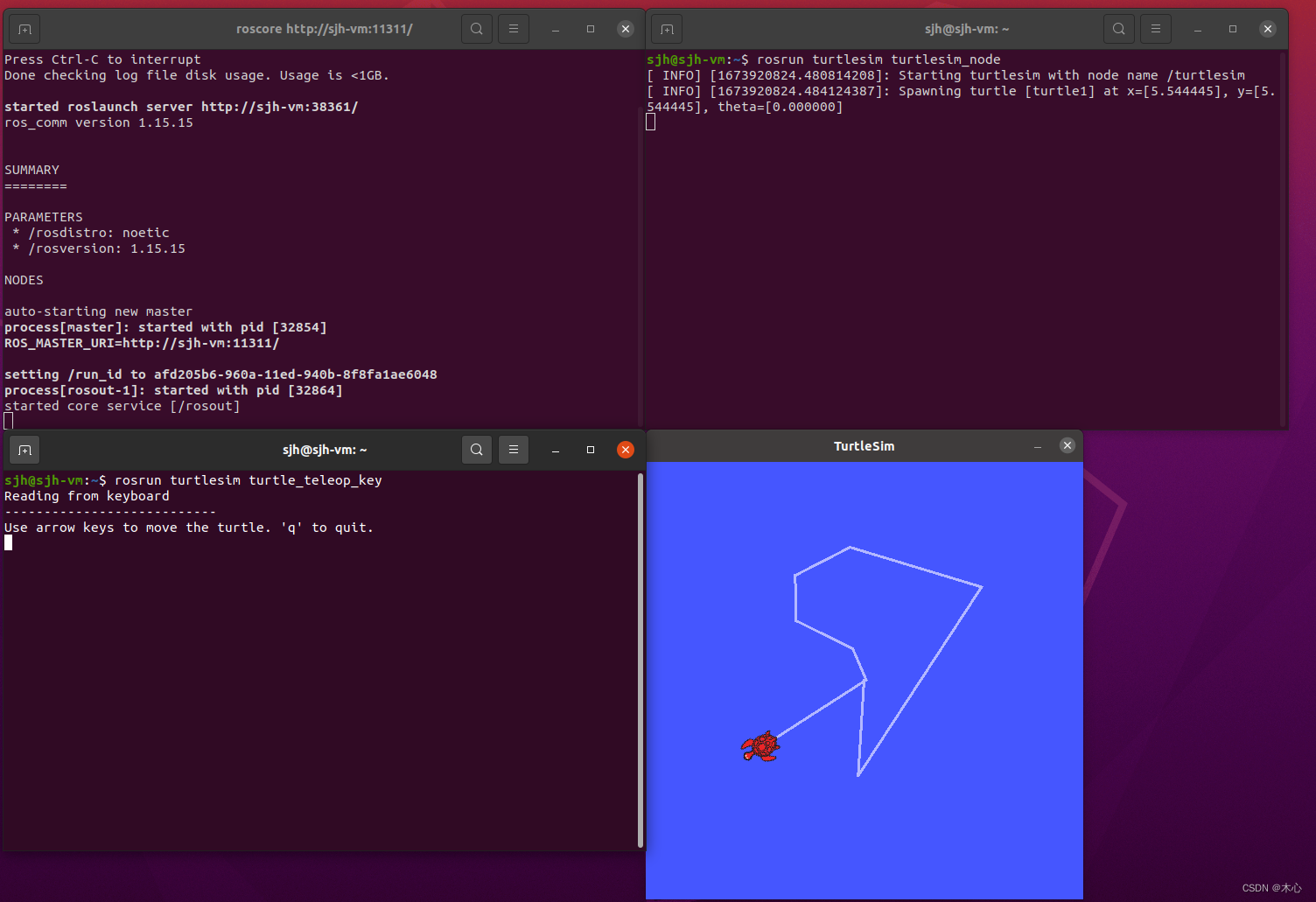
6.检查安装是否成功
打开三个终端,分别输入
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
然后将鼠标聚焦到输入最后一个命令的窗口,通过键盘的上下左右键,分别控制小王八的前进,后退,左转,右转。
Reference
1.参考其他的高赞教程
2.参考其他的高赞教程
3.参考其他的高赞教程
4.Ubuntu版本与ROS对应名称
5.大佬写的rosdepc