基于FPGA的SOQPSK调制解调技术的设计与实现
- SOQPSK
- 一、QPSK、OQPSK、SOQPSK之间的关系
- 二、SOQPSK调制原理
- matlab 仿真
- FPGA 实现
- 顶层设计
- 发射模块
- 接收模块
- 顶层调制解调FPGA代码
SOQPSK
一、QPSK、OQPSK、SOQPSK之间的关系
SOQPSK(Shaped Offset Quadrature Phase Shift Keying),整形偏移四相相移键控。其中,S(shaped)指的是信号的波形经过特殊设计,以优化传输性能,O(offset)表示信号的相位被偏移以改善调制方案的性能。
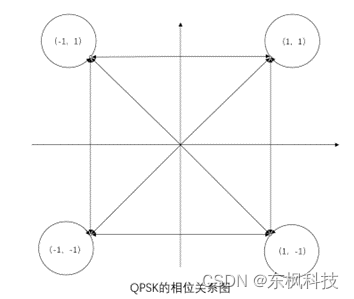
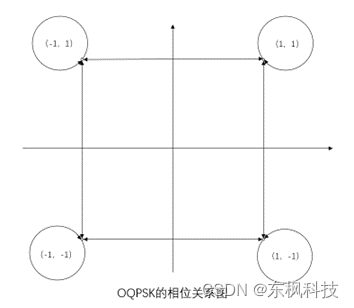
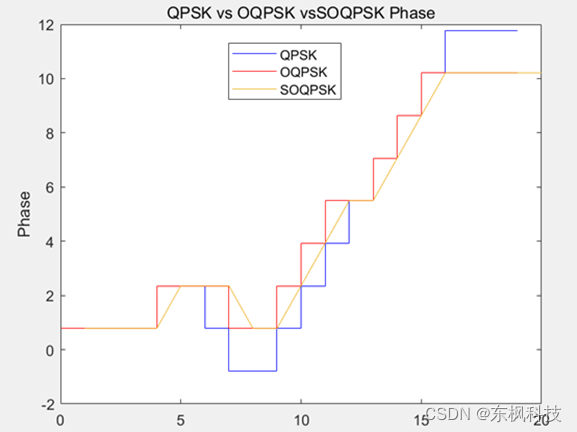
SOQPSK是一种基于QPSK调制方式的改进版本,通过特殊的波形设计和相位调整来改善性能。在QPSK中,将基带码元分成I、Q两路,相邻码元的最大相位差为180°,这样的相位突变在频带受限的系统中会引起信号包络的很大起伏,为了减小此相位突变,在OQPSK中,将I、Q两路在时间上错开半个码元,使之不可能同时改变,此时相邻码元的相位差的最大值为90°,从而减小了信号振幅的起伏,包络恒定,相对于传统的QPSK,它具有更好的抗多径衰落和功率放大器非线性的性能,其频谱旁瓣要低于QPSK信号的旁瓣,且有较高的功率利用率。
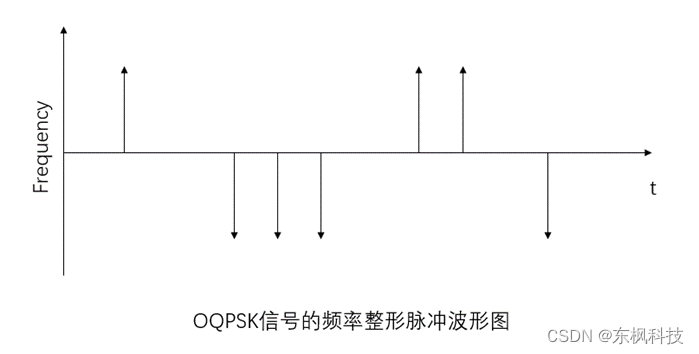
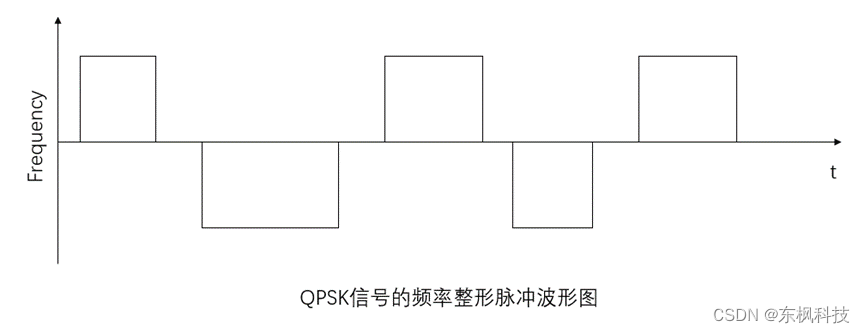
然而,OQPSK依旧具有90°的相位跳变,并且变化并不连续,使得OQPSK的高频滚降变慢,频带变宽。从OQPSK到SOQPSK的实现方式是通过改变附加相位中的频率成形函数,以保证相位的连续变化。在OQPSK中频率成形函数是冲激函数,对应的相位成形函数是矩形函数,因此相位不连续。若要相位成形函数连续,可采用矩形函数或升余弦函数作为频率成形函数,由此得到的相位成形函数是连续的,因而频谱较窄,频谱利用率较高。是连续相位调制(CPM)中的一种特殊调制方式,适用于功率受限且频带受限的通信信道中。
QPSK、OQPSK、SOQPSK的相位曲线
二、SOQPSK调制原理
SOQPSK作为一种特殊的CPM调制方式,区别于传统CPM的一个明显特征是,实际传输的三元符号集{ }为{-1,0,1}。
SOQPSK调制的时域表达式为:
代表一个码元的持续时间, 代表 时间内码元的能量, 代表SOQPSK时域信号的载波频率, 为相位函数, 为初始相位 。其中,

频率脉冲函数为
 相位函数q(t)为频率脉冲函数的积分,即
相位函数q(t)为频率脉冲函数的积分,即
因此,可得到相位信息

为原始输入的二进制数据 ,取值为{0,1},经过预编码

得到,取值为{0,+1,-1}。经过与编码的 ,1和-1不相邻,保证了SOQPSK相邻码元的相位变化最大为 。
matlab 仿真
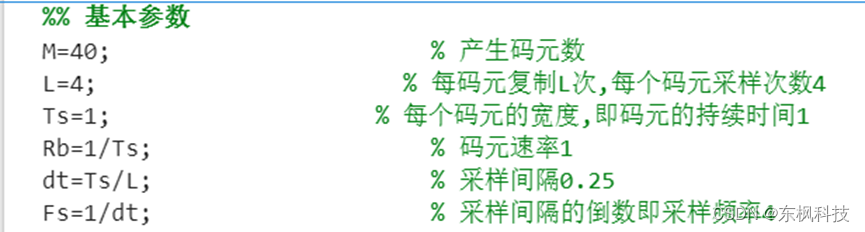
根据以上SOQPSK的基本原理,对SOQPSK在基带上调制解调过程进行matlab仿真。基本参数设置如下
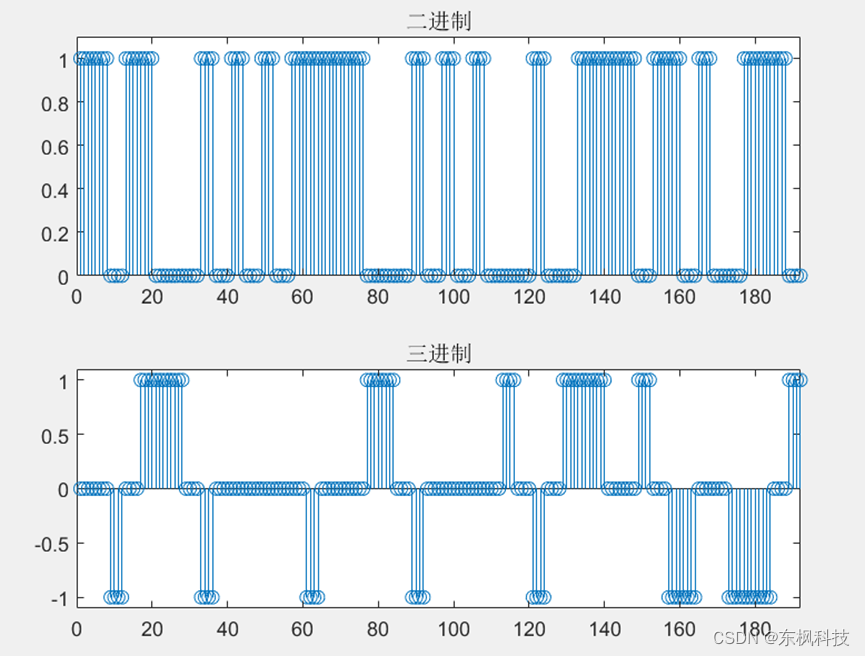
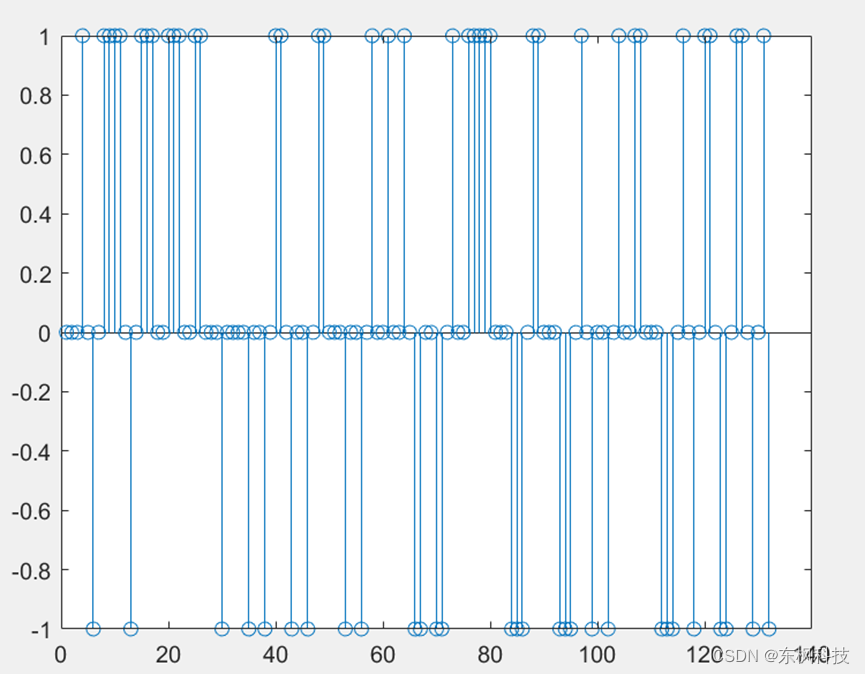
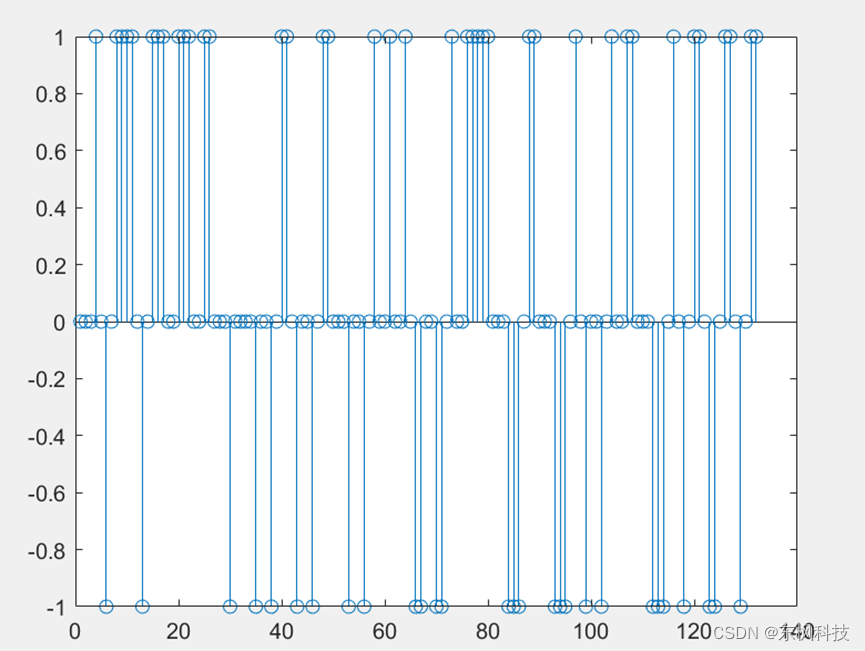
对随机产生的二进制码元进行turbo编码后,对其进行预编码,转化为三进制码元,并进行四倍采样,得到的采样序列如图所示
I路和Q路以及SOQPSK调制后的的基带调制波形如下
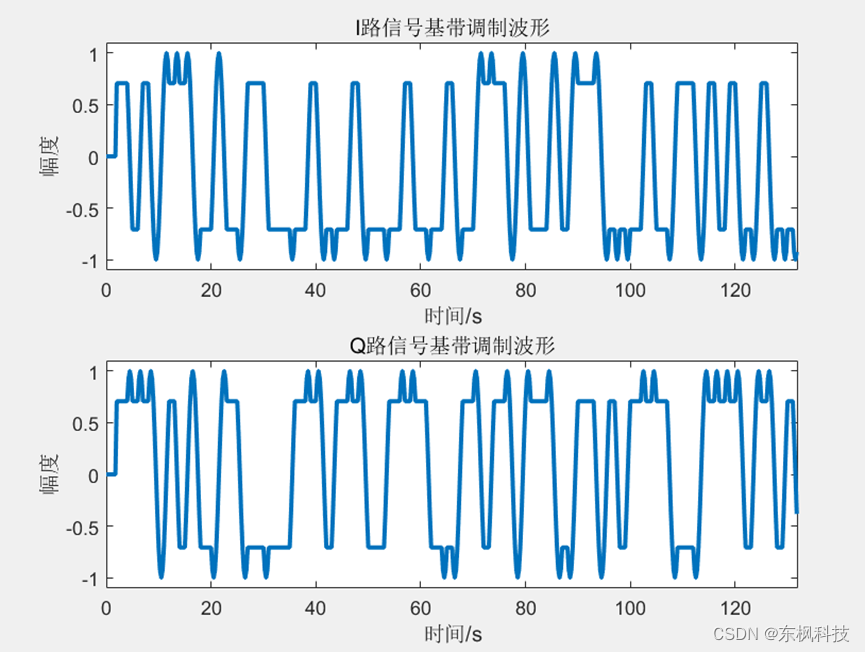
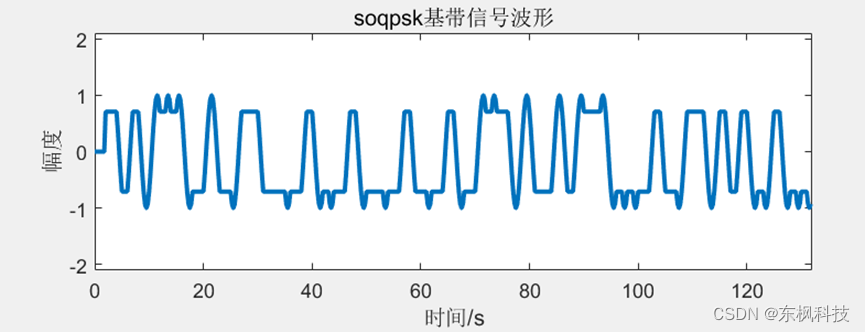
可以看出SOQPSK为恒包络信号
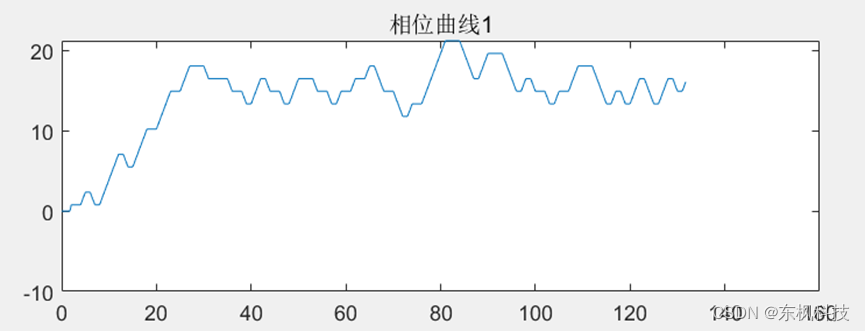
其相位曲线为
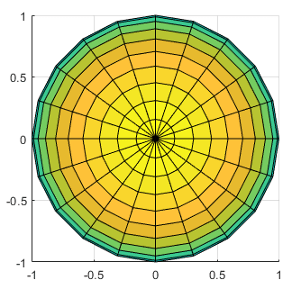
 星座图
星座图
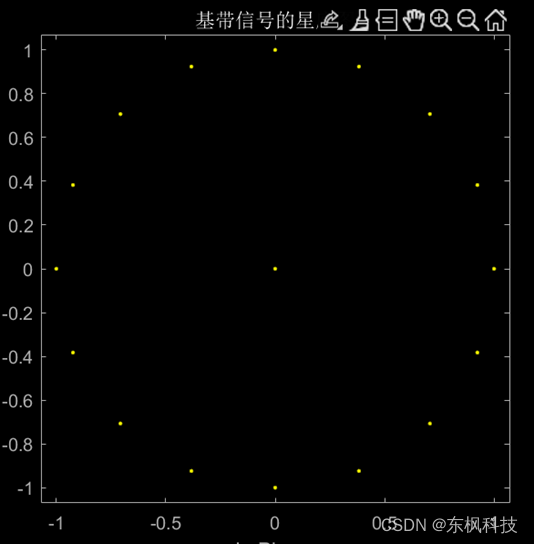
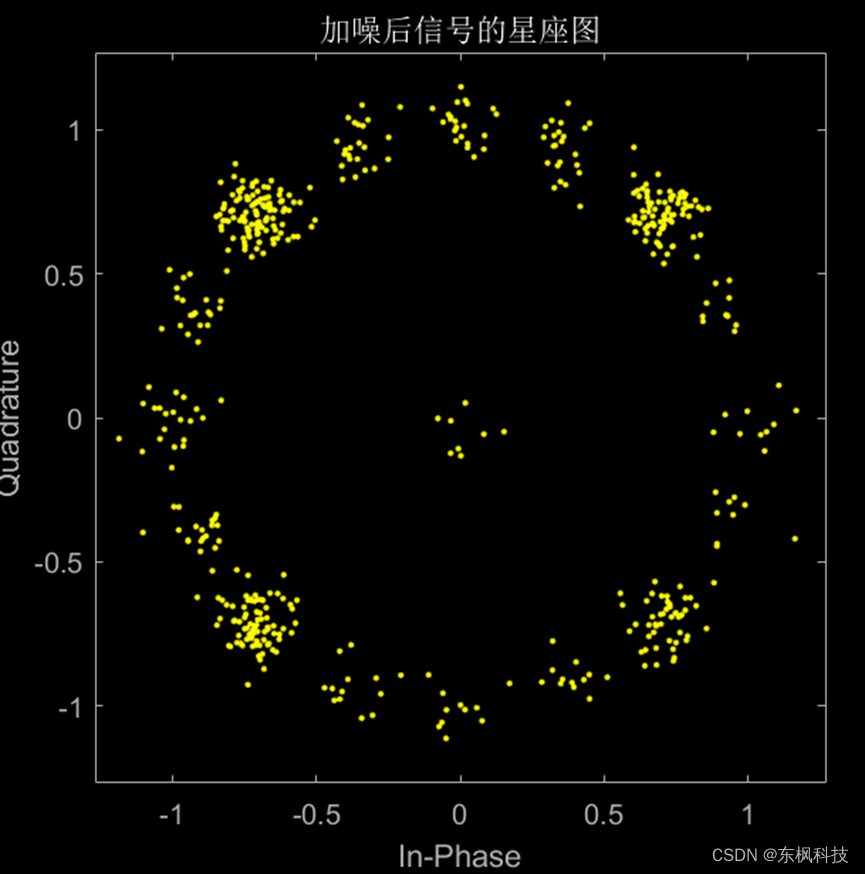
当采样率足够大时,该星座图为一个连续的圆,即SOQPSK相位连续;采样率为1时,SOQPSK星座图与QPSK的星座图相同。
信号频谱如下
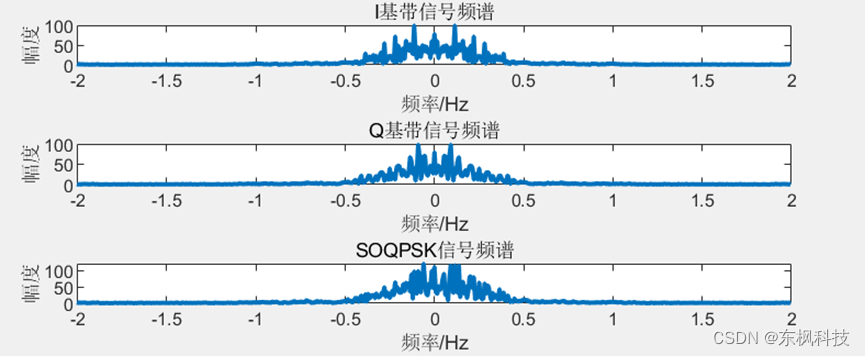
可以看出,经过SOQPSK调制后的信号频谱较窄,频谱利用率高。
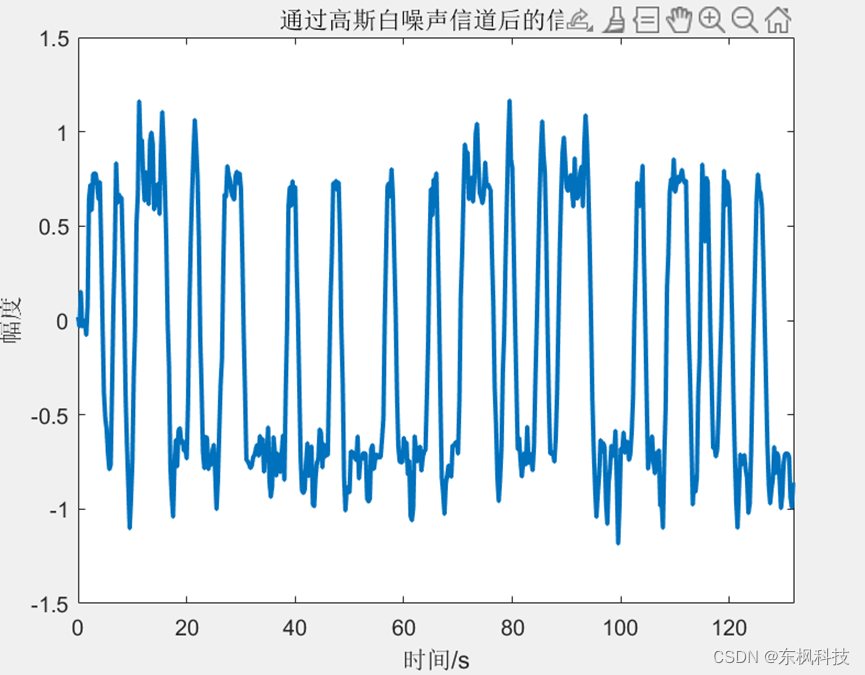
在信道内加入高斯白噪声,信噪比为20db
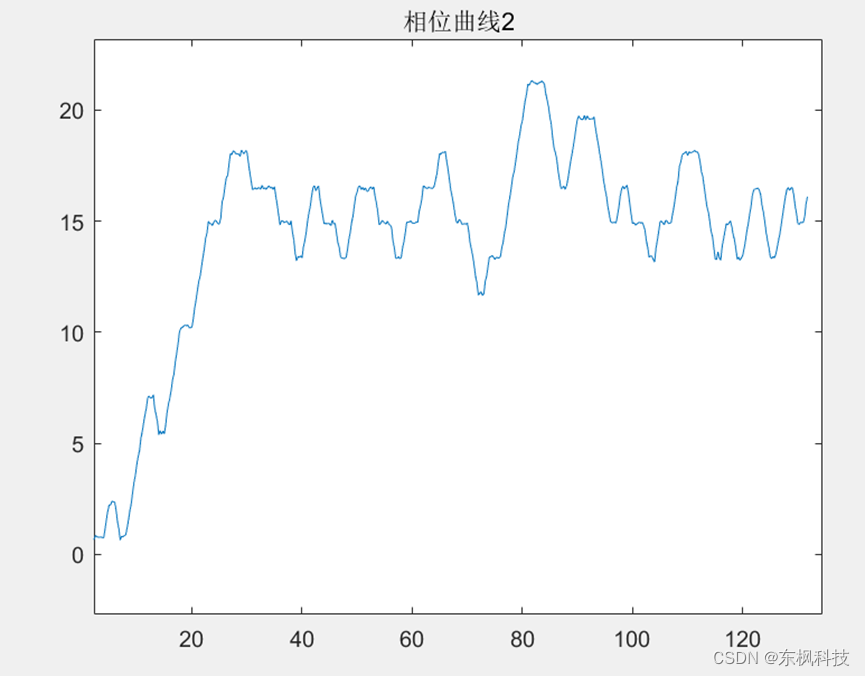
加入噪声后的相位曲线:
星座图
频谱

硬判决:
对加噪后的相位曲线每隔一个码元周期对其进行最小二乘拟合,得到的斜率为
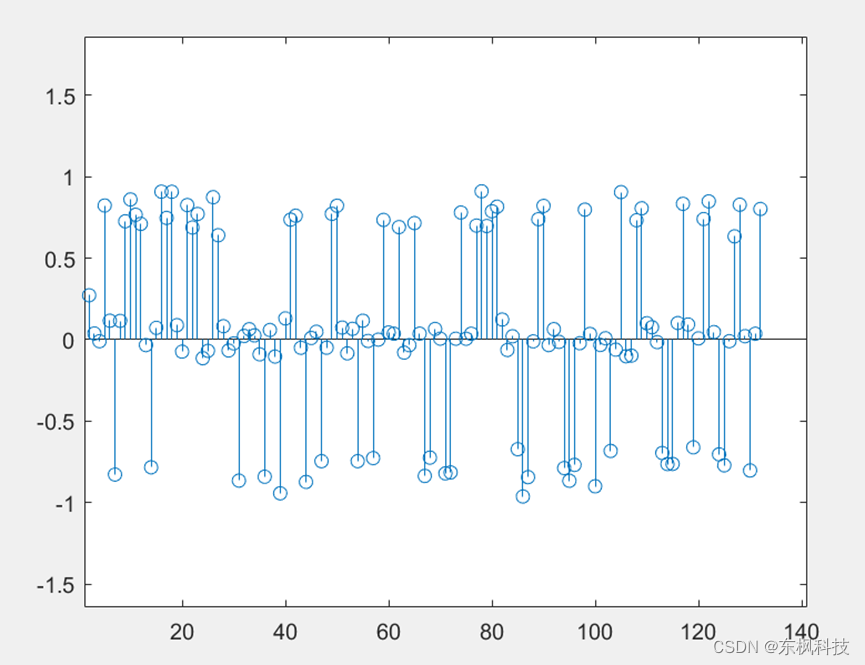
以+0.5和-0.5作为判决门限,得到的判决结果为
与原二进制编码后的输入数据几乎相同
matlab 代码如下(仅仅显示核心代码)
clear ; % 清除所有变量
close all; % 关闭所有窗口
clc; % 清屏
%% 基本参数
M=224*8; % 产生码元数
Ns=4; % 每码元复制L次,每个码元采样次数4
Tb=1; % 每个比特的持续时间1
Rb=1/Tb; % 码元速率1
dt=Tb/Ns; % 采样间隔0.25
Fs=1/dt; % 采样间隔的倒数即采样频率4
%% 产生二进制数据 %%
M_data = 0x1:0xE0;
binStr = dec2bin(M_data);
binData = binStr - '0';
data = reshape(binData',M,1)';
%% turbo编码
encoded_data=TurboEncode(data);
%% SOQPSK 调制
s = soqpsk_mod(encoded_data);
%% 信道
s_n=awgn(s,-20,'measured');%加入高斯白噪声20db
% 度量
L=length(DI);
%分支度量
gammaI_0 = zeros(1,length(DI));
gammaI_1 = zeros(1,length(DI));
gammaI_2 = zeros(1,length(DI));
gammaI_3 = zeros(1,length(DI));
gammaQ_0 = zeros(1,length(DI));
gammaQ_1 = zeros(1,length(DI));
gammaQ_2 = zeros(1,length(DI));
gammaQ_3 = zeros(1,length(DI));
%前向度量
%初始化前向度量
alphaI_0 = zeros(1, L+1);
alphaI_1 = zeros(1, L+1);
alphaQ_0 = zeros(1, L+1);
alphaQ_1 = zeros(1, L+1);
%前向度量的递推
%后向度量
%初始化后向度量
betaI_0 = zeros(1, L+1);
betaI_1 = zeros(1, L+1);
betaQ_0 = zeros(1, L+1);
betaQ_1 = zeros(1, L+1);
%后向度量的递推
% 计算软信息
decoded_data = [llrQ,llrI];
%Turbo译码
turbodecoded_data=lteTurboDecode(decoded_data');
% 计算误码比特数
num_errors = sum(turbodecoded_data' ~= data);
% 计算总比特数
total_bits = length(data);
% 计算误码率
BER = num_errors / total_bits
得出的误码率为零。代码是示意代码。
FPGA 实现
上文已经描述了详细的原理和matlab仿真,下一步就是用FPGA进行实现;
顶层设计
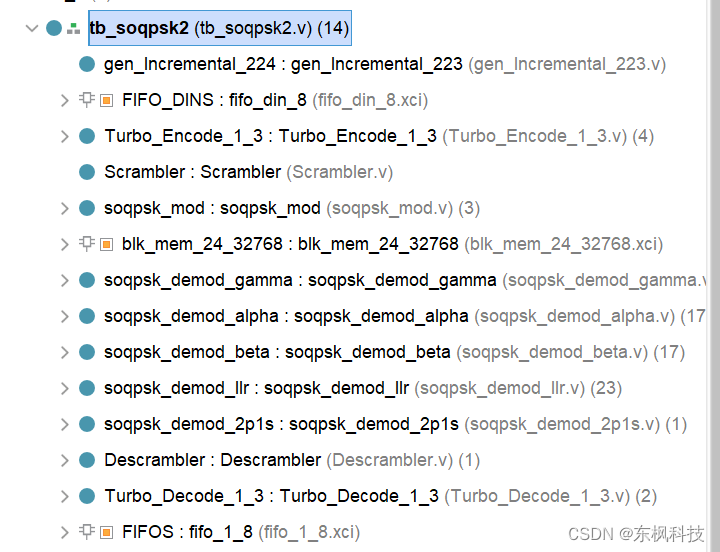
包含了完整的信源和信宿、误码率比较;
包含有加扰和解扰;
包含有soqpsk调制和解调;
包含有turbo编译码;
发射模块
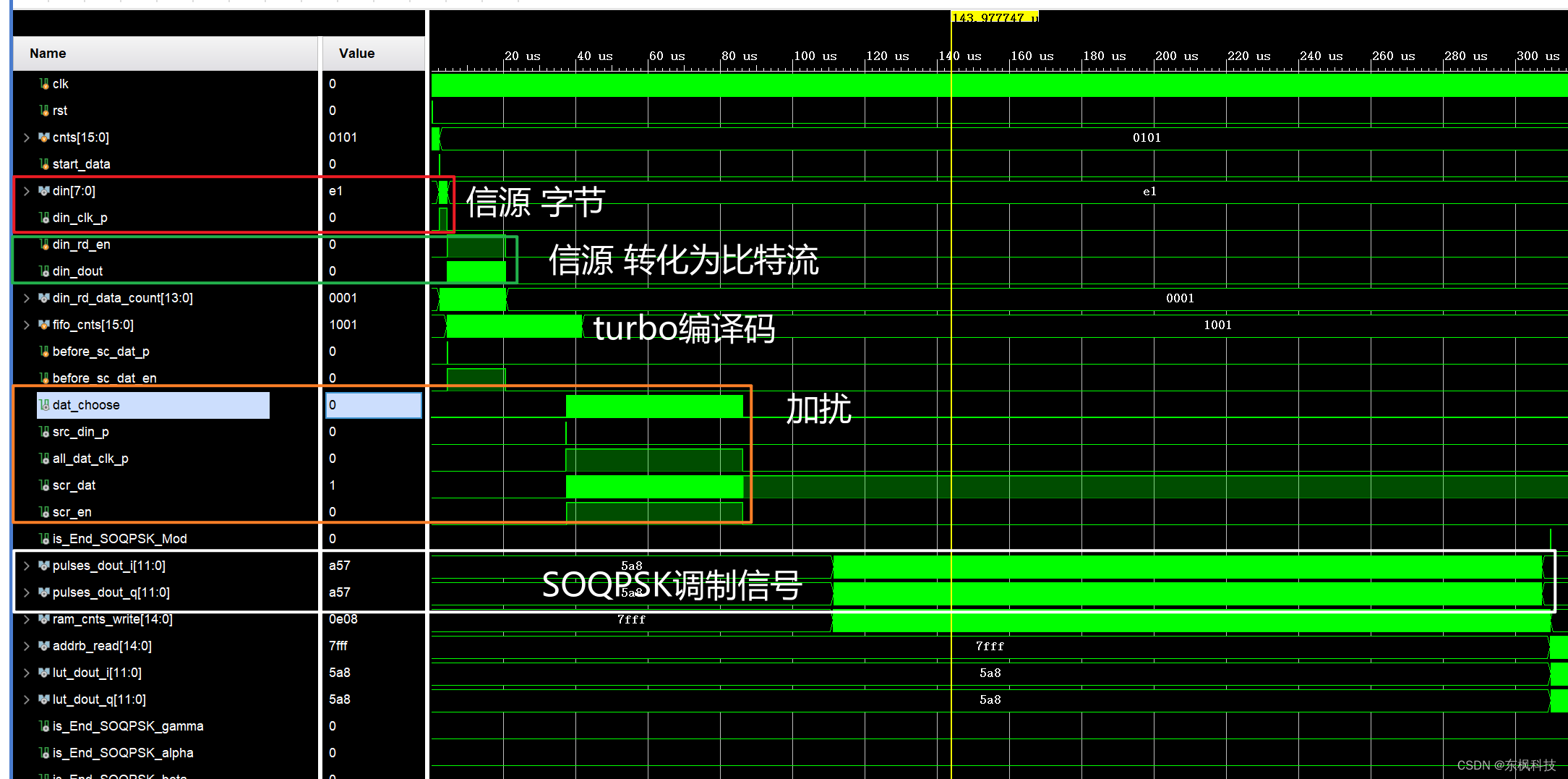

接收模块
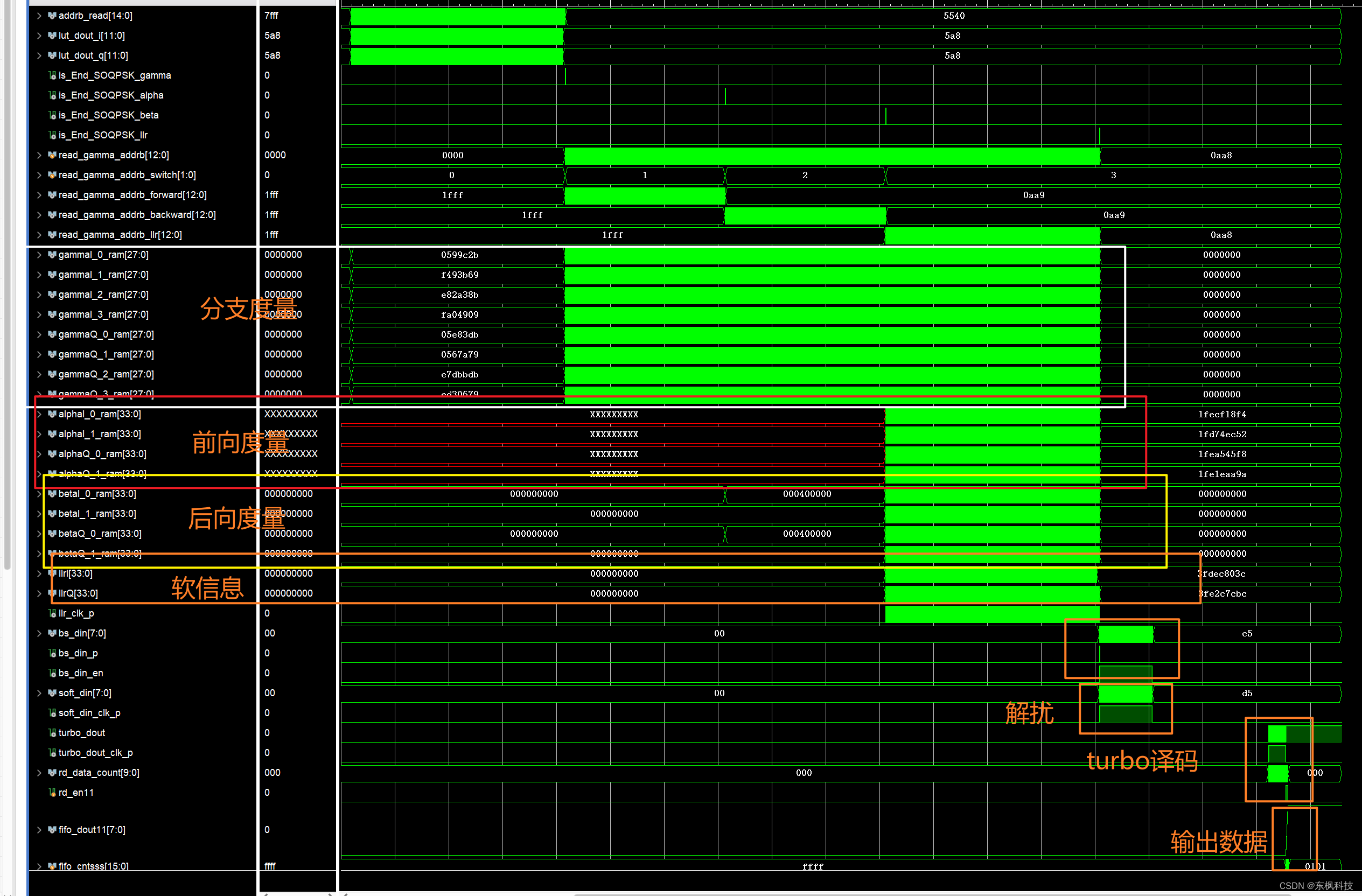
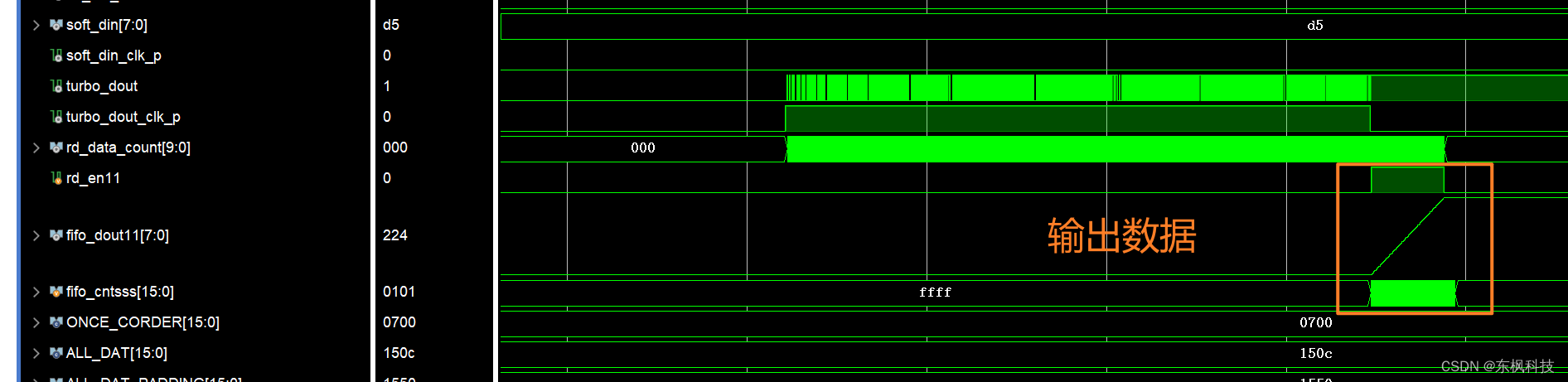
最终输出的数据和发射的数据保持一致;
顶层调制解调FPGA代码
// 生成224 8Bit数据;
gen_Incremental_223 gen_Incremental_224(
.clk (clk ),
.rst (rst ),
.start (start_data ),
.dout (din ),
.dout_clk_p ( ),
.dout_en (din_clk_p )
);
// turbo 编码
// 1/3Turbo Encode
Turbo_Encode_1_3(
.clk (clk ),
.rst (rst ),
.din_dout (din_dout ),
.before_sc_dat_en (before_sc_dat_en),
.before_sc_dat_p (before_sc_dat_p),
.dat_choose (dat_choose ),
.src_din_p (src_din_p ),
.all_dat_clk_p (all_dat_clk_p )
);
Scrambler
#( .FRAME_LENGTH(ALL_DAT-1) ) // 1792*3+12-1 = 5387
Scrambler (
.clk(clk ),//系统时钟
.rst(rst ),//系统复位,高有效
.din(dat_choose ),//待加扰数据
.din_p(src_din_p ),//待加扰数据帧头,脉冲型
.din_en(all_dat_clk_p ),//帧同步后的使能信号,便于写入FIFO
.dout(scr_dat ),//加扰后数据
.dout_en(scr_en ),//加扰后数据使能信号
.dout_p( ) //加扰后数据帧头指示信号,脉冲型
);
// tb:判断是否完成调制
soqpsk_mod(
.clk (clk ),
.rst (rst ),
.scr_dat (scr_dat ),
.scr_en (scr_en ),
.is_End_SOQPSK_Mod(is_End_SOQPSK_Mod),
.pulses_dout_i (pulses_dout_i),
.pulses_dout_q (pulses_dout_q),
.pulses_dout_clk_p(),
.ram_cnts_write (ram_cnts_write)
);
// 组帧
blk_mem_24_32768 blk_mem_24_32768 (
.clka(clk), // input wire clka
.ena(1'b1), // input wire ena
.wea(1'b1), // input wire [0 : 0] wea
.addra(ram_cnts_write ), // input wire [14 : 0] addra_write
.dina({pulses_dout_i,pulses_dout_q}), // input wire [23 : 0] dina
.clkb(clk), // input wire clkb
.enb(1'b1), // input wire enb
.addrb(addrb_read), // input wire [14 : 0] addrb_read
.doutb({lut_dout_i,lut_dout_q}) // output wire [23 : 0] doutb
);
soqpsk_demod_gamma(
.clk (clk ),
.rst (rst ),
.start (is_End_SOQPSK_Mod ),
.addrb_read (addrb_read ),
.lut_dout_i (lut_dout_i ),
.lut_dout_q (lut_dout_q ),
.is_End_SOQPSK_gamma (is_End_SOQPSK_gamma),
.gammaI_0_ram (gammaI_0_ram ),
.gammaI_1_ram (gammaI_1_ram ),
.gammaI_2_ram (gammaI_2_ram ),
.gammaI_3_ram (gammaI_3_ram ),
.gammaQ_0_ram (gammaQ_0_ram ),
.gammaQ_1_ram (gammaQ_1_ram ),
.gammaQ_2_ram (gammaQ_2_ram ),
.gammaQ_3_ram (gammaQ_3_ram ), // Q28.22
.read_gamma_addrb (read_gamma_addrb )
);
// 解调第四步: 前向度量
soqpsk_demod_alpha (
.clk (clk ),
.rst (rst ),
.start (is_End_SOQPSK_gamma ),
.gammaI_0_ram (gammaI_0_ram ),
.gammaI_1_ram (gammaI_1_ram ),
.gammaI_2_ram (gammaI_2_ram ),
.gammaI_3_ram (gammaI_3_ram ),
.gammaQ_0_ram (gammaQ_0_ram ),
.gammaQ_1_ram (gammaQ_1_ram ),
.gammaQ_2_ram (gammaQ_2_ram ),
.gammaQ_3_ram (gammaQ_3_ram ),
.read_gamma_addrb (read_gamma_addrb_forward),
.is_End_SOQPSK_alpha (is_End_SOQPSK_alpha ),
.alphaI_0_ram (alphaI_0_ram ),
.alphaI_1_ram (alphaI_1_ram ),
.alphaQ_0_ram (alphaQ_0_ram ),
.alphaQ_1_ram (alphaQ_1_ram ),
.read_alpha_addrb (read_gamma_addrb_IIr )
);
// 解调第五步: 后向度量
soqpsk_demod_beta(
.clk (clk ),
.rst (rst ),
.start (is_End_SOQPSK_alpha ),
.gammaI_0_ram (gammaI_0_ram ),
.gammaI_1_ram (gammaI_1_ram ),
.gammaI_2_ram (gammaI_2_ram ),
.gammaI_3_ram (gammaI_3_ram ),
.gammaQ_0_ram (gammaQ_0_ram ),
.gammaQ_1_ram (gammaQ_1_ram ),
.gammaQ_2_ram (gammaQ_2_ram ),
.gammaQ_3_ram (gammaQ_3_ram ),
.read_gamma_addrb (read_gamma_addrb_backward),
.is_End_SOQPSK_beta (is_End_SOQPSK_beta ),
.betaI_0_ram (betaI_0_ram),
.betaI_1_ram (betaI_1_ram),
.betaQ_0_ram (betaQ_0_ram),
.betaQ_1_ram (betaQ_1_ram),
.read_beta_addrb (read_gamma_addrb_IIr + 1)
);
// 解调第六步: 计算软信息
soqpsk_demod_llr(
.clk (clk ),
.rst (rst ),
.start (is_End_SOQPSK_beta ),
.gammaI_0_ram (gammaI_0_ram),
.gammaI_1_ram (gammaI_1_ram),
.gammaI_2_ram (gammaI_2_ram),
.gammaI_3_ram (gammaI_3_ram),
.gammaQ_0_ram (gammaQ_0_ram),
.gammaQ_1_ram (gammaQ_1_ram),
.gammaQ_2_ram (gammaQ_2_ram),
.gammaQ_3_ram (gammaQ_3_ram),
.read_gamma_addrb (read_gamma_addrb_IIr),
.betaI_0_ram (betaI_0_ram),
.betaI_1_ram (betaI_1_ram),
.betaQ_0_ram (betaQ_0_ram),
.betaQ_1_ram (betaQ_1_ram),
.read_beta_addrb (),
.alphaI_0_ram (alphaI_0_ram),
.alphaI_1_ram (alphaI_1_ram),
.alphaQ_0_ram (alphaQ_0_ram),
.alphaQ_1_ram (alphaQ_1_ram),
.read_alpha_addrb (),
.is_End_SOQPSK_llr (is_End_SOQPSK_llr),
.llrI (llrI ),
.llrQ (llrQ ),
.llr_clk_p (llr_clk_p )
);
// 转化为串行的数据流
soqpsk_demod_2p1s
# ( .ALL_DAT (ALL_DAT ),
.ALL_DAT_PADDING(ALL_DAT_PADDING) )
soqpsk_demod_2p1s(
.clk (clk),
.rst (rst),
.bs_cut_i (llrI[26:19]),
.bs_cut_q (llrQ[26:19]),
.dout_cut_en (llr_clk_p),
.bs_din (bs_din),
.bs_din_p (bs_din_p),
.bs_din_en (bs_din_en)
);
/*-----------------------------------------------------------------------
下面是进入解扰的模块
-----------------------------------------------------------------------*/
Descrambler
# ( .ALL_DAT(ALL_DAT) )
Descrambler(
.clk (clk ),
.rst (rst ),
.bs_din (bs_din ),
.bs_din_p (bs_din_p ),
.bs_din_en (bs_din_en ),
.soft_din (soft_din),
.soft_din_clk_p (soft_din_clk_p)
);
//准备送入Turbo 译码器
Turbo_Decode_1_3 Turbo_Decode_1_3(
.clk(clk),
.rst(rst),
.soft_din(soft_din),
.soft_din_clk_p(soft_din_clk_p),
.dout(turbo_dout),
.dout_clk_p(turbo_dout_clk_p)
);
// 解调第八步: turbo译码
// tb: 误码率统计
fifo_1_8 FIFOS (
.clk(clk ), // input wire clk
.srst(rst ), // input wire srst
.din(turbo_dout ), // input wire [0 : 0] din
.wr_en(turbo_dout_clk_p), // input wire wr_en
.rd_en( rd_en11 ), // input wire rd_en
.dout( fifo_dout11 ), // output wire [7 : 0] dout
.full( ), // output wire full
.empty( ), // output wire empty
.rd_data_count(rd_data_count ) // output wire [9 : 0] rd_data_count
);










![[AI智能摄像头]RV1126部署yolov5并加速](https://img-blog.csdnimg.cn/direct/85d1a662b0b34838a80a8b09bcd4340e.png)