接上一个教程继续完善,
我们需要对机器人身体的蓝色,我们定义了一种名为“蓝色”的新材质,其中红色、绿色、蓝色和 alpha 通道分别定义为 0、0、0.8 和 1。所有值都可以在 [0,1] 范围内。然后该材料由 base_link 的视觉元素引用。白色材料的定义类似。
您还可以在视觉元素中定义材质标签,甚至可以在其他链接中引用它。
您还可以使用纹理来指定用于为对象着色的图像文件。
看下最新的urdf 文件如下:
<?xml version="1.0"?>
<robot name="materials">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
</robot>
新增颜色定义
<material name="blue"> 和 <material name="white">:定义了两种材料。“blue” 为蓝色(RGBA颜色值为 0 0 0.8 1,即不透明的蓝色),“white” 为白色(RGBA颜色值为 1 1 1 1,即不透明的白色)。
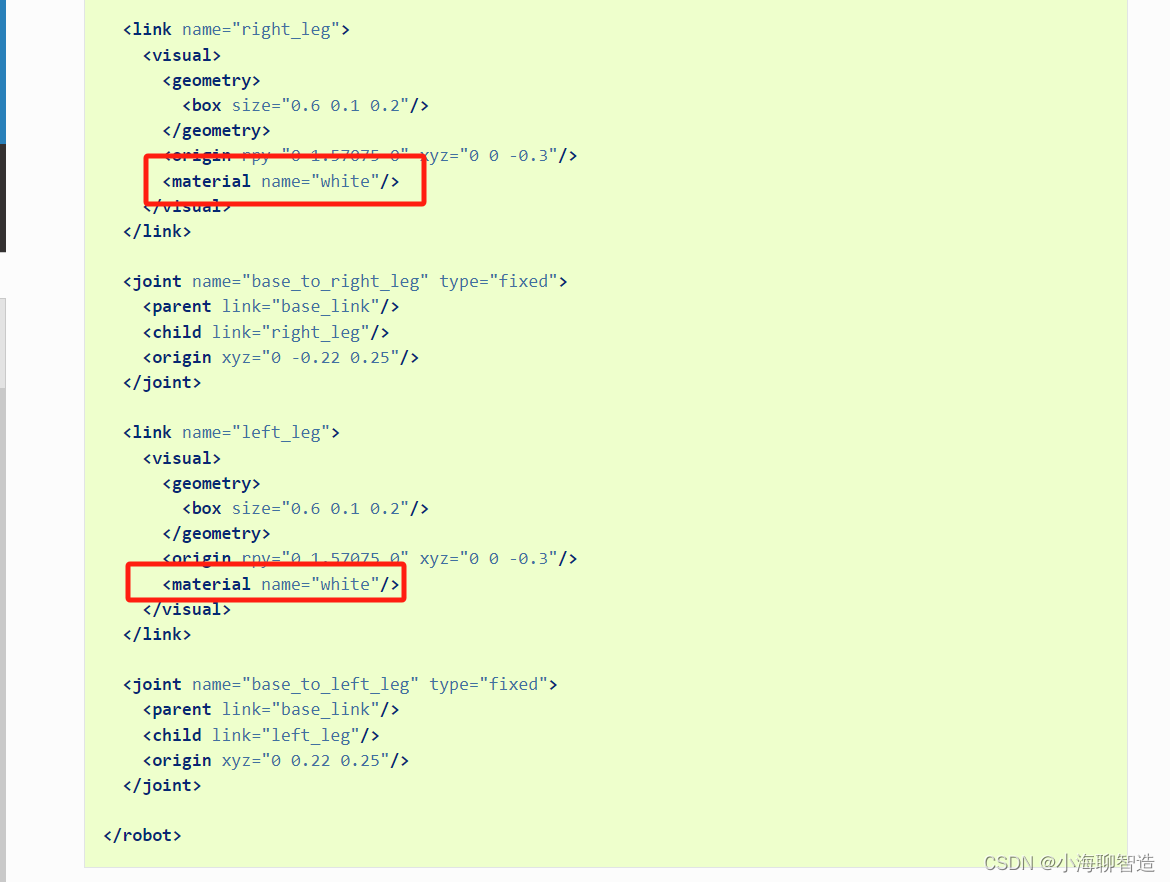
新增左腿链接
左腿链接
<link name="left_leg">:定义了名为 “left_leg” 的链接,与右腿结构相同。
<material name="white"/>:左腿也使用了白色材料。
<joint name="base_to_left_leg" type="fixed">:定义了另一个固定关节,将 “left_leg” 链接到 “base_link”。
<origin xyz="0 0.22 0.25"/>:关节的位置相对于基座的右侧位置进行了镜像设置。
颜色属性赋值
<material name="blue"/>:基座使用了蓝色材料。
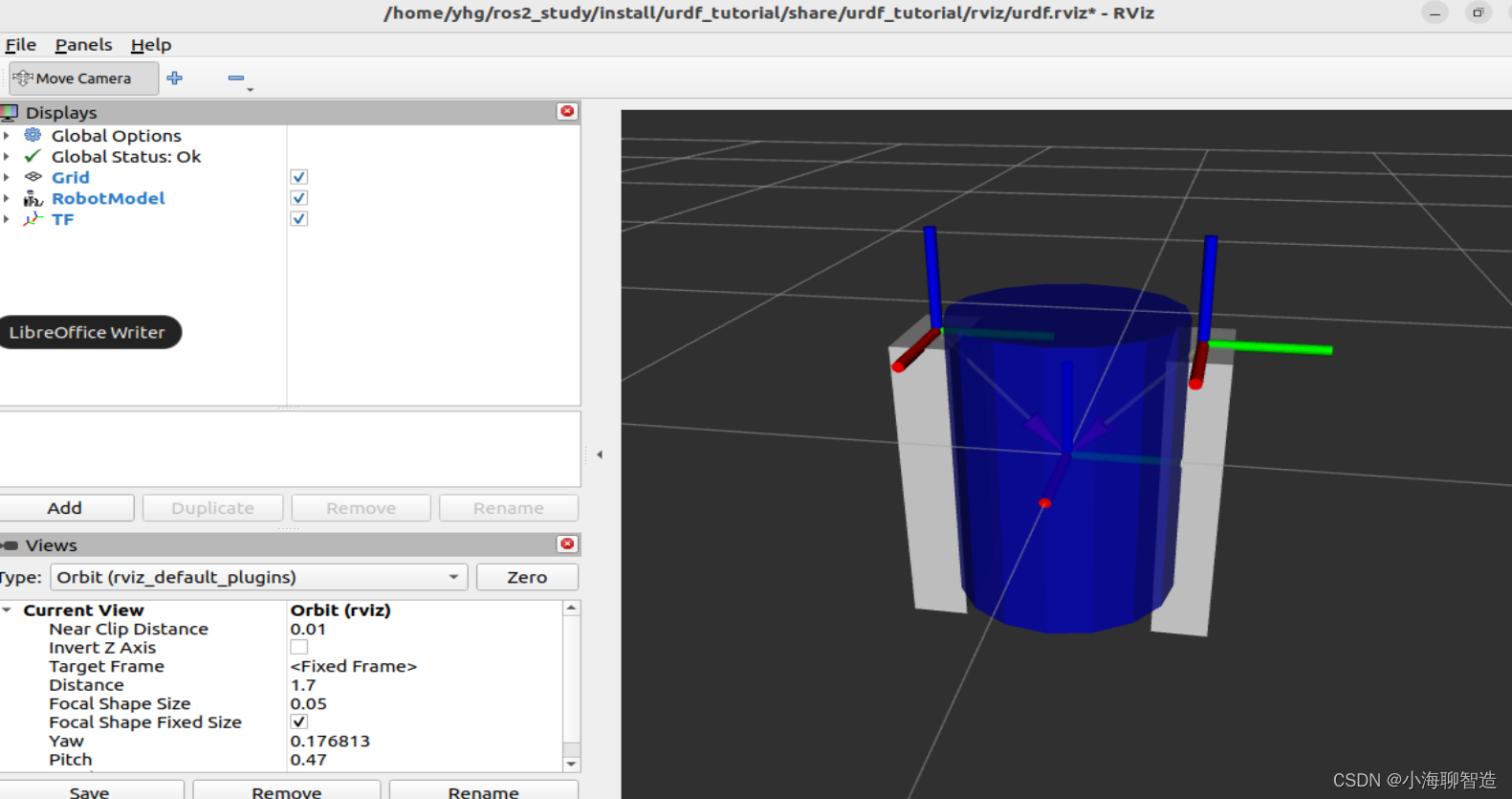
编译-运行,编译有疑问查看前几个文章
运行后的效果:
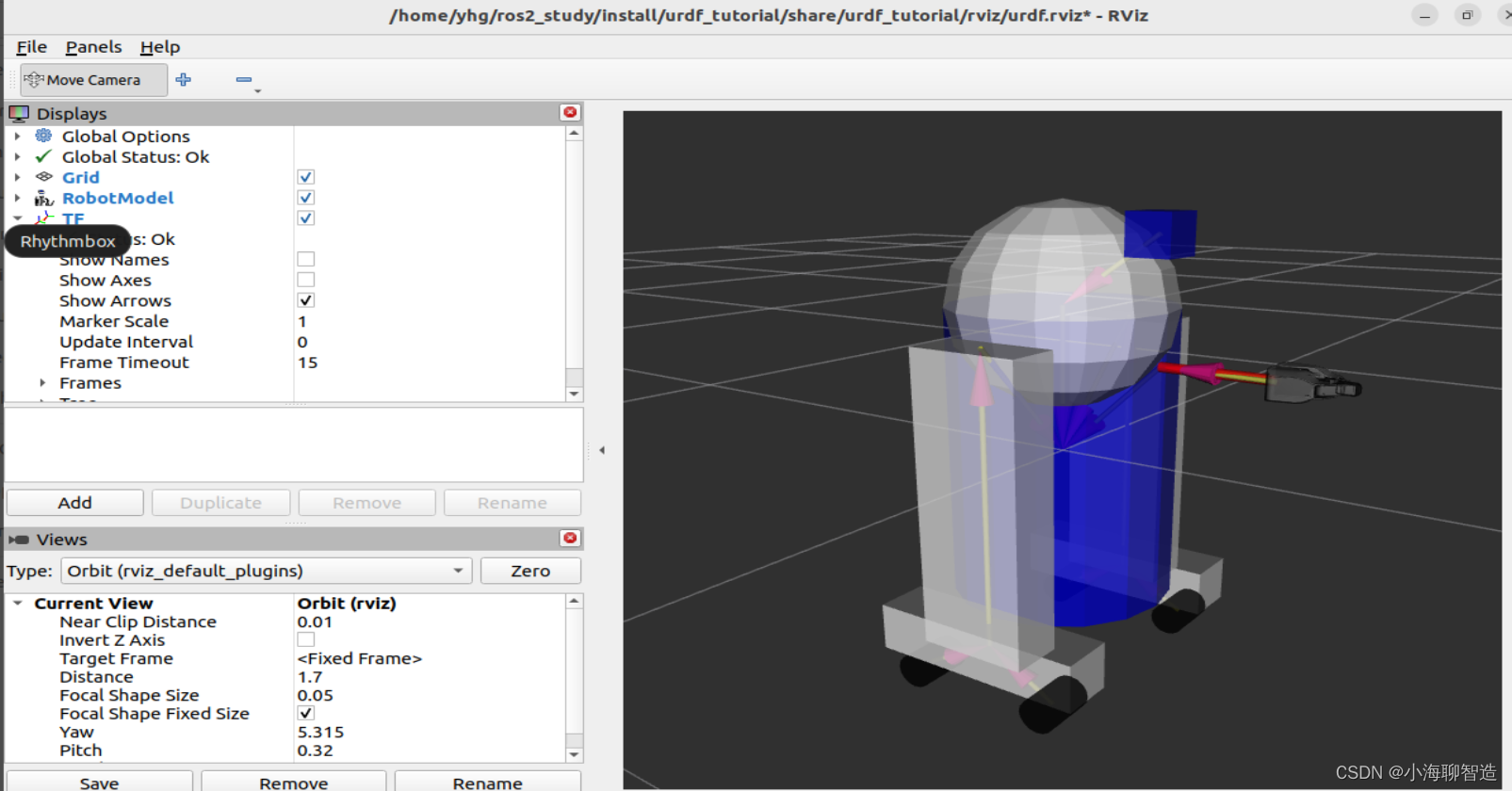
现在我们用更多的形状完成模型:脚、轮子和头部
完整的模型文件如下:
<?xml version="1.0"?>
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="right_front_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="right_back_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_front_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_back_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<joint name="gripper_extension" type="fixed">
<parent link="base_link"/>
<child link="gripper_pole"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
</geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
</visual>
</link>
<joint name="left_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
</joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<joint name="right_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
</joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
</joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="head_swivel" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0 0.3"/>
</joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
</joint>
</robot>
新的模型展示如下:
添加球体
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
<material name="white"/>
</visual>
</link>
urdf 模型中还 可以多种不同的格式导入
STL 相当常见,但引擎还支持 DAE,它可以有自己的颜色数据,这意味着您不必指定颜色/材质。这些通常位于单独的文件中。这些网格物体.tif也引用网格物体文件夹中的文件。
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>