使用单片机的IO引脚直接驱动段码屏,目的是为了降低成本。这种古老的应用,在低功耗产品中比较多见。
如:水表,燃气表等需要电池供电的产品。
下面纯属个人理解,未经测试。
1/3Duty表示LCD共有3个COM引脚,分别占显示周期的1/3
1/2BIAS表示电压0和VCC
1、LCD的COM引脚电压
由于是1/2bias的LCD,因此需在COM引脚产生三种电压:0V、0.5VDD、VDD。实现方法如下:
1)、将LCD的COM引脚通过10K电阻分别连接至VDD和GND;
2)、当CPU连接到COM引脚的IO口配置为输入浮空时,则COM引脚会产生0.5倍VDD的电压;
3)、当CPU连接到COM引脚的IO口输出低电平时,则COM引脚会产生GND电压;
4)、当CPU连接到COM引脚的IO口输出高电平时,则COM引脚会产生VDD电压;
因此,在使用CPU的IO口直接驱动1/2bias的LCD时,要求CPU的IO引脚具有三态输出功能;



2、显示方法:
1)、显示时,交替翻转COM引脚和SEG引脚电压
COM引脚电压为VCC,SEG引脚电压为0,交替后,则为COM引脚电压为0,SEG引脚电压为VCC;
2)、不显示时,交替翻转COM引脚和SEG引脚电压
COM引脚电压为VCC,SEG引脚电压为VCC,交替后,则为COM引脚电压为0,SEG引脚电压为0;
只要COM引脚和SEG引脚的电压差为+VCC或者-VCC,就可以点亮对应的LCD笔段即像素点,具体实现步骤如下:
第1次中断时设置COM0引脚输出High,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第2次中断时设置COM0引脚输出Low,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第3次中断时设置COM1引脚输出High,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第4次中断时设置COM1引脚输出Low,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第5次中断时设置COM2引脚输出High,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第6次中断时设置COM2引脚输出Low,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
循环进行以上的6次循环设置,即可完成“使用单片机IO模拟驱动段码LCD”;
3、占空比和偏压比的关系:
一般来说,Bias的选择与COM使用个数有关,但不是绝对。见下图:

4、选择单片机直接驱动LCD,还是选择专用的驱动芯片,以及注意事项如下:
1)、单片机本身不带LCD驱动功能,在使用单片机IO直接驱动段码LCD时,偏压比只能选择1/2。
在LCD的COM引脚加上拉、下拉各1个电阻,阻值一般为100-200K;选择偏压比为1/3,也可以用,但效果没有1/2好。
2)、MCU+专用的LCD显示驱动芯片:
常用的驱动芯片有1621、1622,对应的偏压比为1/3、1/4,LCD的COM引脚就不需要外加电阻了,而且单片机可以选择相对脚位少的、资源少点的,这样单片机的价格会便宜,但驱动芯片不便宜;
若供电电压小于4.5V,建议选择1/2偏压。使用1/2偏压,液晶抖度相对大一些,在垂直视角看的会比较清楚,并且可以过12点法线。
如果供电电压小于4.5V,选择1/3偏压,虽然也可以用,但是没有1/2偏压的显示效果好,且过不了12点垂直法线。
5、其它信息
一般LCD液晶屏有三个主要参数,工作中电压Duty(相匹配COM数)和BIAS(偏压,相匹配阀值)。
例如,3.3V、1/4 Duty、1/3 BIAS表明LCD的工作中电压为3.3V,有4个COM,阀值大概是1.1V(3.3/3=1.1)。
具体应用中,为确保显示实际效果优良,一般给电极两边加的电压差贴近LCD的工作中电压;若想不显示,一般
给电极两边加的电压差贴近0V。
必须需注意的是,lcd屏分子结构是必须用沟通交流数据信号来推动的,千万不能将直流电电压长期的加进电极
两边,不然,会危害lcd屏分子结构的电化学特点,造成显示实际效果模糊不清,使用期限降低的不良影响,不
可修复。
1/4 Duty、1/3 BIAS的LCD点亮方法如下:
点亮某一段时,必须确保给其电极两边加的电压差为3.3V,如COM1=3.3V,SEG1=0V,而且保持合适的时
间间距,然后再将COM1和SEG1引脚的电压翻转輸出,如COM1=0V,SEG1=3.3V;
不点亮某一段时,必须确保给其电极两边加的电压差为0V,如COM1=3.3V,SEG1=3.3V,,而且保持合适的时
间间距,然后再将COM1和SEG1引脚的电压翻转輸出,如COM1=0V,SEG1=0V;
6、SegmentCodeScreen.c测试程序
以下程序未经测试,只是理论,没有板子测试。
#include "SegmentCodeScreen.h"
/*
使用单片机的IO引脚直接驱动段码屏,目的是为了降低成本。这种古老的应用,在低功耗产品中比较多见。
如:水表,燃气表等需要电池供电的产品。
1/3Duty表示LCD共有3个COM引脚,分别占显示周期的1/3
1/2BIAS表示电压0和VCC
LCD的COM引脚电压
由于是1/2bias的LCD,因此需在COM引脚产生三种电压:0V、0.5VDD、VDD。实现方法如下:
1)、将LCD的COM引脚通过10K电阻分别连接至VDD和GND;
2)、当CPU连接到COM引脚的IO口配置为输入浮空时,则COM引脚会产生0.5倍VDD的电压;
3)、当CPU连接到COM引脚的IO口输出低电平时,则COM引脚会产生GND电压;
4)、当CPU连接到COM引脚的IO口输出高电平时,则COM引脚会产生VDD电压;
因此,在使用CPU的IO口直接驱动1/2bias的LCD时,要求CPU的IO引脚具有三态输出功能;
由于是1/3duty的LCD,所以COM引脚的波形图如下:
COM0电压波形图:
3V __ __
| | | |
1.5V __| | __________| | ___________
| | | |
0V |__| |__|
COM1电压波形图:
3V __ __
| | | |
1.5V ________| | __________| | _____
| | | |
0V |__| |__|
COM2电压波形图:
3V __ __
| | | |
1.5V ______________| | __________| |
| | | |
0V |__| |__|
如果SEG1电压波形图如下,根据上面的COM0,COM1和COM2引脚波形,则SEG1和COM交点处的笔画码不会显示:
3V __ __ __ __ __ __
| | | | | | | | | | | |
1.5V __| | | | | | | | | | | |
| | | | | | | | | | | |
0V |__| |__| |__| |__| |__| |__|
如果SEG1电压波形图如下,根据上面的COM0,COM1和COM2引脚波形,则SEG1和COM交点处的笔画码会显示:
3V __ __ __ __ __ __
| | | | | | | | | | | |
1.5V __ | | | | | | | | | | | |
| | | | | | | | | | | |
0V |__| |__| |__| |__| |__| |__|
1)、显示时,交替翻转COM引脚和SEG引脚电压
COM引脚电压为VCC,SEG引脚电压为0,交替后,则为COM引脚电压为0,SEG引脚电压为VCC;
2)、不显示时,交替翻转COM引脚和SEG引脚电压
COM引脚电压为VCC,SEG引脚电压为VCC,交替后,则为COM引脚电压为0,SEG引脚电压为0;
只要COM引脚和SEG引脚的电压差为+VCC或者-VCC,就可以点亮对应的LCD笔段即像素点,具体实现步骤如下:
第1次中断时设置COM0引脚输出High,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第2次中断时设置COM0引脚输出Low,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第3次中断时设置COM1引脚输出High,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第4次中断时设置COM1引脚输出Low,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第5次中断时设置COM2引脚输出High,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
第6次中断时设置COM2引脚输出Low,其它COM引脚输出VDD/2,再根据要显示的数据设置各个SEG的输出;
循环进行以上的6次循环设置,即可完成“使用单片机IO模拟驱动段码LCD”;
*/
unsigned char Scan_SegmentCodeScreen_Counter;
unsigned int wei1_num=NUM0;//个位上的数码管1显示数据
unsigned int wei2_num=NUM0;//十位上的数码管1显示数据
unsigned int wei3_num=NUM0;//百位上的数码管显示数据
unsigned int wei4_num=NUM0;//千位上的数码管显示数据
unsigned int timer_value;//计数器的值
u16 Timer2MilliSecond;//毫秒计数器
void TIM2_Interrupt_Initializtion(u16 arr,u16 psc);
//函数功能:sel=1设置GPIOB13为输出口,sel=0,则设置GPIOB13为浮空输入
void COM0_PIN_Configuration(u8 sel)
{
GPIO_InitTypeDef GPIO_InitStructure;
if(sel==1)
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //选择第13脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
else
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //选择第13脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
}
//函数功能:sel=1设置GPIOB14为输出口,sel=0,则设置GPIOB14为浮空输入
void COM1_PIN_Configuration(u8 sel)
{
GPIO_InitTypeDef GPIO_InitStructure;
if(sel==1)
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //选择第14脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
else
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //选择第14脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
}
//函数功能:sel=1设置GPIOB15为输出口,sel=0,则设置GPIOB15为浮空输入
void COM2_PIN_Configuration(u8 sel)
{
GPIO_InitTypeDef GPIO_InitStructure;
if(sel==1)
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //选择第15脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
else
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //选择第15脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
}
//函数功能:设置GPIOB1为输出口
void SEG1_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //选择第1脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB2为输出口
void SEG2_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //选择第2脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB3为输出口
void SEG3_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //选择第3脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB4为输出口
void SEG4_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //选择第4脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB5为输出口
void SEG5_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //选择第5脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB6为输出口
void SEG6_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //选择第6脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB7为输出口
void SEG7_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //选择第7脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB8为输出口
void SEG8_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //选择第8脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB9为输出口
void SEG9_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //选择第9脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB10为输出口
void SEG10_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //选择第10脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB11为输出口
void SEG11_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //选择第11脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
//函数功能:设置GPIOB12为输出口
void SEG12_PIN_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //选择第12脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO口的最高工作频率为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOB
}
void SegmentCodeScreen_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB的外设时钟
COM0_PIN_Configuration(0);
COM1_PIN_Configuration(0);
COM2_PIN_Configuration(0);
SEG1_PIN_Configuration();
SEG2_PIN_Configuration();
SEG3_PIN_Configuration();
SEG4_PIN_Configuration();
SEG5_PIN_Configuration();
SEG6_PIN_Configuration();
SEG7_PIN_Configuration();
SEG8_PIN_Configuration();
SEG9_PIN_Configuration();
SEG10_PIN_Configuration();
SEG11_PIN_Configuration();
SEG12_PIN_Configuration();
}
void SegmentCodeScreen_Work(void)//定时器配置5ms扫描一次即可
{
Scan_SegmentCodeScreen_Counter++;//下一位
if(Scan_SegmentCodeScreen_Counter>5)//扫描完一轮才更新数值
{
Scan_SegmentCodeScreen_Counter=0;
switch(timer_value%10000/1000)//求千位数
{
case 0: wei4_num=NUM0; break;
case 1: wei4_num=NUM1; break;
case 2: wei4_num=NUM2; break;
case 3: wei4_num=NUM3; break;
case 4: wei4_num=NUM4; break;
case 5: wei4_num=NUM5; break;
case 6: wei4_num=NUM6; break;
case 7: wei4_num=NUM7; break;
case 8: wei4_num=NUM8; break;
case 9: wei4_num=NUM9; break;
}
switch(timer_value%1000/100)//求百位数
{
case 0: wei3_num=NUM0; break;
case 1: wei3_num=NUM1; break;
case 2: wei3_num=NUM2; break;
case 3: wei3_num=NUM3; break;
case 4: wei3_num=NUM4; break;
case 5: wei3_num=NUM5; break;
case 6: wei3_num=NUM6; break;
case 7: wei3_num=NUM7; break;
case 8: wei3_num=NUM8; break;
case 9: wei3_num=NUM9; break;
}
switch(timer_value%100/10)//求十位数
{
case 0: wei2_num=NUM0; break;
case 1: wei2_num=NUM1; break;
case 2: wei2_num=NUM2; break;
case 3: wei2_num=NUM3; break;
case 4: wei2_num=NUM4; break;
case 5: wei2_num=NUM5; break;
case 6: wei2_num=NUM6; break;
case 7: wei2_num=NUM7; break;
case 8: wei2_num=NUM8; break;
case 9: wei2_num=NUM9; break;
}
switch(timer_value%10)//求个位数
{
case 0: wei1_num=NUM0; break;
case 1: wei1_num=NUM1; break;
case 2: wei1_num=NUM2; break;
case 3: wei1_num=NUM3; break;
case 4: wei1_num=NUM4; break;
case 5: wei1_num=NUM5; break;
case 6: wei1_num=NUM6; break;
case 7: wei1_num=NUM7; break;
case 8: wei1_num=NUM8; break;
case 9: wei1_num=NUM9; break;
}
}
switch(Scan_SegmentCodeScreen_Counter) //动态扫描
{
case 0: //COM0引脚正向驱动
COM1_PIN_Configuration(0);//设置COM1引脚为输入浮空,COM1引脚因电阻分压得到电压为VDD/2
COM2_PIN_Configuration(0);//设置COM2引脚为输入浮空,COM1引脚因电阻分压得到电压为VDD/2
COM0_PIN_Configuration(1);//配置COM0引脚为输出口
COM0=1;//COM0引脚电压为VCC,则要求SEGx引脚电压为0
千位上的数码管/
if(wei4_num!=NUM0)
{
if(wei4_num&0x01) SEG1=0;else SEG1=1;
if(wei4_num&0x02) SEG2=0;else SEG2=1;
if(wei4_num&0x04) SEG3=0;else SEG3=1;
}
else{SEG1=1;SEG2=1;SEG3=1;}//不显示
百位上的数码管
if(wei3_num&0x01) SEG4=0;else SEG4=1;
if(wei3_num&0x02) SEG5=0;else SEG5=1;
if(wei3_num&0x04) SEG6=0;else SEG6=1;
十位上的数码管
if(wei2_num&0x01) SEG7=0;else SEG7=1;
if(wei2_num&0x02) SEG8=0;else SEG8=1;
if(wei2_num&0x04) SEG9=0;else SEG9=1;
个位上的数码管
if(wei1_num&0x01) SEG10=0;else SEG10=1;
if(wei1_num&0x02) SEG11=0;else SEG11=1;
if(wei1_num&0x04) SEG12=0;else SEG12=1;
break;
case 1://COM0引脚反向驱动
COM1_PIN_Configuration(0);//设置COM1引脚为输入浮空,COM1引脚因电阻分压得到电压为VDD/2
COM2_PIN_Configuration(0);//设置COM2引脚为输入浮空,COM1引脚因电阻分压得到电压为VDD/2
COM0_PIN_Configuration(1);//配置COM0引脚为输出口
COM0=0;//COM0引脚电压为0,则SEGx引脚电压为VCC;
千位上的数码管/
if(wei4_num&0x01) SEG1=1; else SEG1=0;
if(wei4_num&0x02) SEG2=1; else SEG2=0;
if(wei4_num&0x04) SEG3=1; else SEG3=0;
百位上的数码管
if(wei4_num!=NUM0)
{
if(wei3_num&0x01) SEG4=1; else SEG4=0;
if(wei3_num&0x02) SEG5=1; else SEG5=0;
if(wei3_num&0x04) SEG6=1; else SEG6=0;
}
else{SEG1=0;SEG2=0;SEG3=0;}//不显示
十位上的数码管
if(wei2_num&0x01) SEG7=1;else SEG7=0;
if(wei2_num&0x02) SEG8=1;else SEG8=0;
if(wei2_num&0x04) SEG9=1;else SEG9=0;
个位上的数码管
if(wei1_num&0x01) SEG10=1;else SEG10=0;
if(wei1_num&0x02) SEG11=1;else SEG11=0;
if(wei1_num&0x04) SEG12=1;else SEG12=0;
break;
case 2://COM1引脚正向驱动
COM0_PIN_Configuration(0);//除COM1输出外,其余COM设为输入
COM2_PIN_Configuration(0);//除COM1输出外,其余COM设为输入
COM1_PIN_Configuration(1);//配置COM1引脚为输出口
COM1=1;//COM1引脚电压为VCC,则要求SEGx引脚电压为0
千位上的数码管/
if(wei4_num!=NUM0)
{
if(wei4_num&0x08) SEG1=0; else SEG1=1;
if(wei4_num&0x10) SEG2=0; else SEG2=1;
if(wei4_num&0x20) SEG3=0; else SEG3=1;
}
else{SEG1=1;SEG2=1;SEG3=1;}//不显示
百位上的数码管
if(wei3_num&0x08) SEG4=0;else SEG4=1;
if(wei3_num&0x10) SEG5=0;else SEG5=1;
if(wei3_num&0x20) SEG6=0;else SEG6=1;
十位上的数码管
if(wei2_num&0x08) SEG7=0;else SEG7=1;
if(wei2_num&0x10) SEG8=0;else SEG8=1;
if(wei2_num&0x20) SEG9=0;else SEG9=1;
个位上的数码管
if(wei1_num&0x08) SEG10=0;else SEG10=1;
if(wei1_num&0x10) SEG11=0;else SEG11=1;
if(wei1_num&0x20) SEG12=0;else SEG12=1;
break;
case 3://COM1引脚反向驱动
COM0_PIN_Configuration(0);//除COM1输出外,其余COM设为输入
COM2_PIN_Configuration(0);//除COM1输出外,其余COM设为输入
COM1_PIN_Configuration(1);//配置COM1引脚为输出口
COM1=0;//COM1引脚电压为0,则要求SEGx引脚电压为VCC
千位上的数码管/
if(wei4_num!=NUM0)
{
if(wei4_num&0x08) SEG1=1; else SEG1=0;
if(wei4_num&0x10) SEG2=1; else SEG2=0;
if(wei4_num&0x20) SEG3=1; else SEG3=0;
}
else{SEG1=0;SEG2=0;SEG3=0;}//不显示
百位上的数码管
if(wei3_num&0x08) SEG4=1;else SEG4=0;
if(wei3_num&0x10) SEG5=1;else SEG5=0;
if(wei3_num&0x20) SEG6=1;else SEG6=0;
十位上的数码管
if(wei2_num&0x08) SEG7=1;else SEG7=0;
if(wei2_num&0x10) SEG8=1;else SEG8=0;
if(wei2_num&0x20) SEG9=1;else SEG9=0;
个位上的数码管
if(wei1_num&0x08) SEG10=1;else SEG10=0;
if(wei1_num&0x10) SEG11=1;else SEG11=0;
if(wei1_num&0x20) SEG12=1;else SEG12=0;
break;
case 4:
COM0_PIN_Configuration(0);//除COM2输出外,其余COM设为输入
COM1_PIN_Configuration(0);//除COM2输出外,其余COM设为输入
COM2_PIN_Configuration(1);//配置COM1引脚为输出口
COM2=1;//COM2引脚电压为VCC,则要求SEGx引脚电压为0
千位上的数码管/
if(wei4_num!=NUM0)
{
if(wei4_num&0x40) SEG1=0;else SEG1=1;
if(wei4_num&0x80) SEG2=0;else SEG2=1;
if(wei4_num&0x100) SEG3=0;else SEG3=1;
}
else{SEG1=1;SEG2=1;SEG3=1;}//不显示
百位上的数码管/
if(wei3_num&0x40) SEG4=0;else SEG4=1;
if(wei3_num&0x80) SEG5=0;else SEG5=1;
if(wei3_num&0x100) SEG6=0;else SEG6=1;
十位上的数码管/
if(wei2_num&0x40) SEG7=0;else SEG7=1;
if(wei2_num&0x80) SEG8=0;else SEG8=1;
if(wei2_num&0x100) SEG9=0;else SEG9=1;
个位上的数码管/
if(wei1_num&0x40) SEG10=0;else SEG10=1;
if(wei1_num&0x80) SEG11=0;else SEG11=1;
if(wei1_num&0x100) SEG12=0;else SEG12=1;
break;
case 5:
COM0_PIN_Configuration(0);//除COM2输出外,其余COM设为输入
COM1_PIN_Configuration(0);//除COM2输出外,其余COM设为输入
COM2_PIN_Configuration(1);//配置COM1引脚为输出口
COM2=0;//COM2引脚电压为0,则要求SEGx引脚电压为VCC
千位上的数码管/
if(wei4_num!=NUM0)
{
if(wei4_num&0x40) SEG1=1;else SEG1=0;
if(wei4_num&0x80) SEG2=1;else SEG2=0;
if(wei4_num&0x100) SEG3=1;else SEG3=0;
}
else{SEG1=0;SEG2=0;SEG3=0;}//不显示
百位上的数码管/
if(wei3_num&0x40) SEG4=1;else SEG4=0;
if(wei3_num&0x80) SEG5=1;else SEG5=0;
if(wei3_num&0x100) SEG6=1;else SEG6=0;
十位上的数码管/
if(wei2_num&0x40) SEG7=1;else SEG7=0;
if(wei2_num&0x80) SEG8=1;else SEG8=0;
if(wei2_num&0x100) SEG9=1;else SEG9=0;
个位上的数码管/
if(wei1_num&0x40) SEG10=1;else SEG10=0;
if(wei1_num&0x80) SEG11=1;else SEG11=0;
if(wei1_num&0x100) SEG12=1;else SEG12=0;
break;
}
}
//通用定时器2中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器2!
//TIM2_Interrupt_Initializtion(1000,36);//当arr=1000,psc=36时,则为0.5ms,误差为0.5us;
//TIM2_Interrupt_Initializtion(2000,36);//当arr=2000,psc=36时,则为1ms,误差为0.5us;
//TIM2_Interrupt_Initializtion(4000,36);//当arr=4000,psc=36时,则为2ms,误差为0.5us;
void TIM2_Interrupt_Initializtion(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器TIM2的APB1外设时钟
//定时器TIM2初始化
TIM_TimeBaseStructure.TIM_Period = arr-1; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc-1; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
//计算公式:arr*psc/72000000/1,当arr=1000,psc=72时,则为1ms,误差为1us;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_SetCounter(TIM2,0); //设置TIM2的计数器值为0;
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除TIM2溢出的待处理标志位
TIM_ClearITPendingBit(TIM2, TIM_IT_Update ); //清除TIM2中断的待处理位
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE ); //允许TIM2溢出产生中断
//中断优先级NVIC设置
//NVIC_PriorityGroup_4设置NVIC中断分组4:表示抢占优先级为4位,取值为0~15,没有响应优先级,取值为0
//NVIC_PriorityGroup_3设置NVIC中断分组3:表示抢占优先级为3位,取值为0~7,响应优先级只有1位,取值为0~1
//NVIC_PriorityGroup_2设置NVIC中断分组3:表示抢占优先级为2位,取值为0~3,响应优先级只有2位,取值为0~3
//NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 11; //设置抢占优先级为11
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //设置响应优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化NVIC嵌套向量中断控制寄存器
TIM_Cmd(TIM2, ENABLE);//使能TIM2外设
SegmentCodeScreen_Init();
Timer2MilliSecond=0;//毫秒计数器
timer_value=0;
}
//函数功能:TIM2每1ms中断一次
void TIM2_IRQHandler()
{
if (TIM_GetITStatus(TIM2,TIM_IT_Update) != RESET) //TIM2计数器溢出产生中断
{
Timer2MilliSecond++;//毫秒计数器加1
if(Timer2MilliSecond%5==0)//5毫秒时间到达
{
SegmentCodeScreen_Work();
}
if(Timer2MilliSecond%1000==0)//1秒时间到达
{
timer_value++;
if(timer_value>999) timer_value=0;
Timer2MilliSecond=0;
}
TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除TIM2计数器的溢出中断标志;
}
}
7、SegmentCodeScreen.h
#ifndef _SegmentCodeScreen_H
#define _SegmentCodeScreen_H
#include "stm32f10x.h"
#include "sys.h"
/*
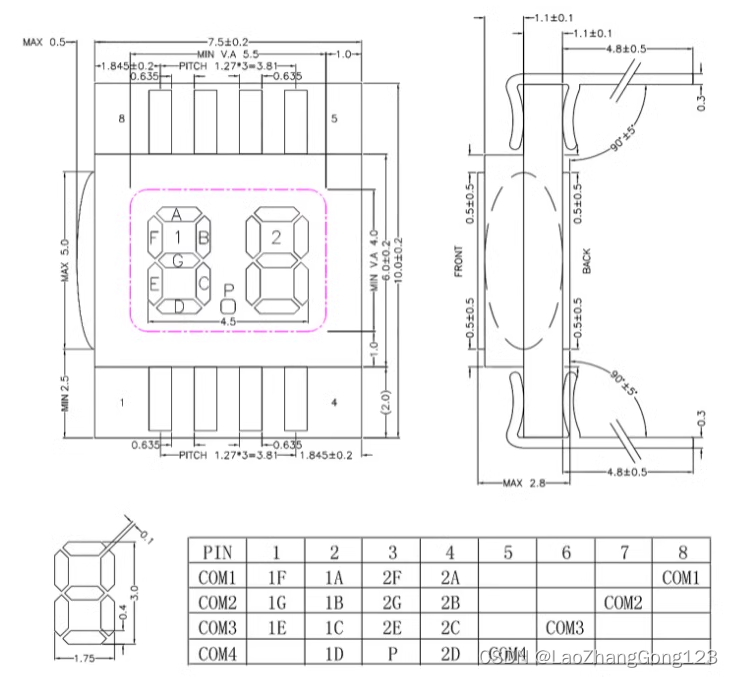
LCD引脚号码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
LCD引脚名字 COM0 COM1 COM2 SEG1 SEG2 SEG3 SEG4 SEG5 SEG6 SEG7 SEG8 SEG9 SEG10 SEG11 SEG12
COM0 -- -- -- 1D -- -- 2D COL -- 3D -- -- 4D --
-- COM1 -- 1E 1G 1C 2E 2G 2C 3E 3G 3C 4E 4G 4C
-- -- COM2 1F 1A 1B 2F 2A 2B 3F 3A 3B 4F 4A 4B
*/
/*
数码管1:
COM0和SEG2控制数码管1的D段
COM1和SEG1控制数码管1的E段
COM1和SEG2控制数码管1的G段
COM1和SEG3控制数码管1的C段
COM2和SEG1控制数码管1的F段
COM2和SEG2控制数码管1的A段
COM2和SEG3控制数码管1的B段
*/
#define COM0_SEG1_VALUE 0x01 //定义LCD引脚SEG1和COM0交点的值,对于数码管1来说,没有段
#define COM0_SEG2_VALUE 0x02 //定义LCD引脚SEG2和COM0交点的值,即定义数码管1的D段
#define COM0_SEG3_VALUE 0x04 //定义LCD引脚SEG3和COM0交点的值,对于数码管1来说,没有段
#define COM1_SEG1_VALUE 0x08 //定义LCD引脚SEG1和COM1交点的值,即定义数码管1的E段
#define COM1_SEG2_VALUE 0x10 //定义LCD引脚SEG2和COM1交点的值,即定义数码管1的G段
#define COM1_SEG3_VALUE 0x20 //定义LCD引脚SEG3和COM1交点的值,即定义数码管1的C段
#define COM2_SEG1_VALUE 0x40 //定义LCD引脚SEG1和COM2交点的值,即定义数码管1的F段
#define COM2_SEG2_VALUE 0x80 //定义LCD引脚SEG2和COM2交点的值,即定义数码管1的A段
#define COM2_SEG3_VALUE 0x100 //定义LCD引脚SEG3和COM2交点的值,即定义数码管1的B段
/*
数码管2:
COM0和SEG5控制数码管2的D段
COM0和SEG6控制数码管2的COL段,即“:”
COM1和SEG4控制数码管2的E段
COM1和SEG5控制数码管2的G段
COM1和SEG6控制数码管2的C段
COM2和SEG4控制数码管2的F段
COM2和SEG5控制数码管2的A段
COM2和SEG3控制数码管6的B段
*/
#define COM0_SEG4_VALUE 0x01 //定义LCD引脚SEG4和COM0交点的值,对于数码管2来说,没有段
#define COM0_SEG5_VALUE 0x02 //定义LCD引脚SEG5和COM0交点的值,即定义数码管2的D段
#define COM0_SEG6_VALUE 0x04 //定义LCD引脚SEG6和COM0交点的值,即定义数码管2的COL段
#define COM1_SEG4_VALUE 0x08 //定义LCD引脚SEG4和COM1交点的值,即定义数码管2的E段
#define COM1_SEG5_VALUE 0x10 //定义LCD引脚SEG5和COM1交点的值,即定义数码管2的G段
#define COM1_SEG6_VALUE 0x20 //定义LCD引脚SEG6和COM1交点的值,即定义数码管2的C段
#define COM2_SEG4_VALUE 0x40 //定义LCD引脚SEG4和COM2交点的值,即定义数码管2的F段
#define COM2_SEG5_VALUE 0x80 //定义LCD引脚SEG5和COM2交点的值,即定义数码管2的A段
#define COM2_SEG6_VALUE 0x100 //定义LCD引脚SEG6和COM2交点的值,即定义数码管2的B段
/*
数码管3:
COM0和SEG8控制数码管3的D段
COM1和SEG7控制数码管3的E段
COM1和SEG8控制数码管3的G段
COM1和SEG9控制数码管3的C段
COM2和SEG7控制数码管3的F段
COM2和SEG8控制数码管3的A段
COM2和SEG9控制数码管3的B段
*/
#define COM0_SEG7_VALUE 0x01 //定义LCD引脚SEG7和COM0交点的值,对于数码管3来说,没有段
#define COM0_SEG8_VALUE 0x02 //定义LCD引脚SEG8和COM0交点的值,即定义数码管3的D段
#define COM0_SEG9_VALUE 0x04 //定义LCD引脚SEG9和COM0交点的值,对于数码管3来说,没有段
#define COM1_SEG7_VALUE 0x08 //定义LCD引脚SEG7和COM1交点的值,即定义数码管3的E段
#define COM1_SEG8_VALUE 0x10 //定义LCD引脚SEG8和COM1交点的值,即定义数码管3的G段
#define COM1_SEG9_VALUE 0x20 //定义LCD引脚SEG9和COM1交点的值,即定义数码管3的C段
#define COM2_SEG7_VALUE 0x40 //定义LCD引脚SEG7和COM2交点的值,即定义数码管3的F段
#define COM2_SEG8_VALUE 0x80 //定义LCD引脚SEG8和COM2交点的值,即定义数码管3的A段
#define COM2_SEG9_VALUE 0x100 //定义LCD引脚SEG9和COM2交点的值,即定义数码管3的B段
/*
数码管4:
COM0和SEG11控制数码管4的D段
COM1和SEG10控制数码管4的E段
COM1和SEG11控制数码管4的G段
COM1和SEG12控制数码管4的C段
COM2和SEG10控制数码管4的F段
COM2和SEG11控制数码管4的A段
COM2和SEG12控制数码管4的B段
*/
#define COM0_SEG10_VALUE 0x01 //定义LCD引脚SEG10和COM0交点的值,对于数码管4来说,没有段
#define COM0_SEG11_VALUE 0x02 //定义LCD引脚SEG11和COM0交点的值,即定义数码管4的D段
#define COM0_SEG12_VALUE 0x04 //定义LCD引脚SEG12和COM0交点的值,对于数码管4来说,没有段
#define COM1_SEG10_VALUE 0x08 //定义LCD引脚SEG10和COM1交点的值,即定义数码管4的E段
#define COM1_SEG11_VALUE 0x10 //定义LCD引脚SEG11和COM1交点的值,即定义数码管4的G段
#define COM1_SEG12_VALUE 0x20 //定义LCD引脚SEG12和COM1交点的值,即定义数码管4的C段
#define COM2_SEG10_VALUE 0x40 //定义LCD引脚SEG10和COM2交点的值,即定义数码管4的F段
#define COM2_SEG11_VALUE 0x80 //定义LCD引脚SEG11和COM2交点的值,即定义数码管4的A段
#define COM2_SEG12_VALUE 0x100 //定义LCD引脚SEG12和COM2交点的值,即定义数码管4的B段
/*
-----A----
| |
F B
| |
----G ---
| |
E C
| | _
-----D---- | |COL
-
根据上述定义,我们发现如下规律:
数码管的A段用0x80表示
数码管的B段用0x100表示
数码管的C段用0x20表示
数码管的D段用0x02表示
数码管的E段用0x08表示
数码管的F段用0x40表示
数码管的G段用0x10表示
数码管的COL段用0x04表示
*/
#define NUM0 0x01EF//A段+B段+C段+D段+E段+F段 = 0x80+0x100+0x20+0x02+0x08+0x40
#define NUM1 0x0120//B段+C段 = 0x100+0x20
#define NUM2 0x019A//A段+B段+G段+E段+D段 = 0x80+0x100+0x10+0x08+0x02
#define NUM3 0x01B2//A段+B段+G段+C段+D段 = 0x80+0x100+0x10+0x20+0x02
#define NUM4 0x0170//F段+G段+B段+C段 = 0x40+0x10+0x100+0x20
#define NUM5 0x00F2//A段+F段+G段+C段+D段 = 0x80+0x40+0x10+0x20+0x02
#define NUM6 0x00FA//A段+F段+E段+D段+C段+G段 = 0x80+0x40+0x08+0x02+0x20+0x10
#define NUM7 0x01A0//A段+B段+C段 = 0x80+0x100+0x20
#define NUM8 0x01FA//A段+B段+C段+D段+E段+F段+G段 =0x80+0x100+0x20+0x02+0x08+0x40+0x10
#define NUM9 0x01F2//A段+B段+C段+D段+F段+G段 =0x80+0x100+0x20+0x02+0x40+0x10
//CPU引脚定义///
#define SEG1 PBout(1) //PB1
#define SEG2 PBout(2) //PB2
#define SEG3 PBout(3) //PB3
#define SEG4 PBout(4) //PB4
#define SEG5 PBout(5) //PB5
#define SEG6 PBout(6) //PB6
#define SEG7 PBout(7) //PB7
#define SEG8 PBout(8) //PB8
#define SEG9 PBout(9) //PB9
#define SEG10 PBout(10) //PB10
#define SEG11 PBout(11) //PB11
#define SEG12 PBout(12) //PB12
#define COM0 PBout(13) //PB13
#define COM1 PBout(14) //PB14
#define COM2 PBout(15) //PB15
extern void TIM2_Interrupt_Initializtion(u16 arr,u16 psc);
#endif




![[muduo网络库]——muduo库TimeStamp类(剖析muduo网络库核心部分、设计思想)](https://img-blog.csdnimg.cn/direct/ed1723afa7c8426ca82ccf22bc341fb7.png)
![[力扣题解] 96. 不同的二叉搜索树](https://img-blog.csdnimg.cn/direct/a16c9c76eab2463d8055367737afdc32.png#pic_center)