一、目的
RT-Thread是一个小而美的RTOS,所有的RTOS的都有一个特点,那就是存在调度器,像RT-Thread的调度器是一个实时抢占式调度器(同优先级任务使用时间片调度方式)。
本篇不讲调度器相关的内容,着重讲解调度器运行之前的启动过程,帮助大家理解OS启动过程。
二、介绍
本篇以STM32H750XBH6 Art-Pi硬件平台帮助大家理解
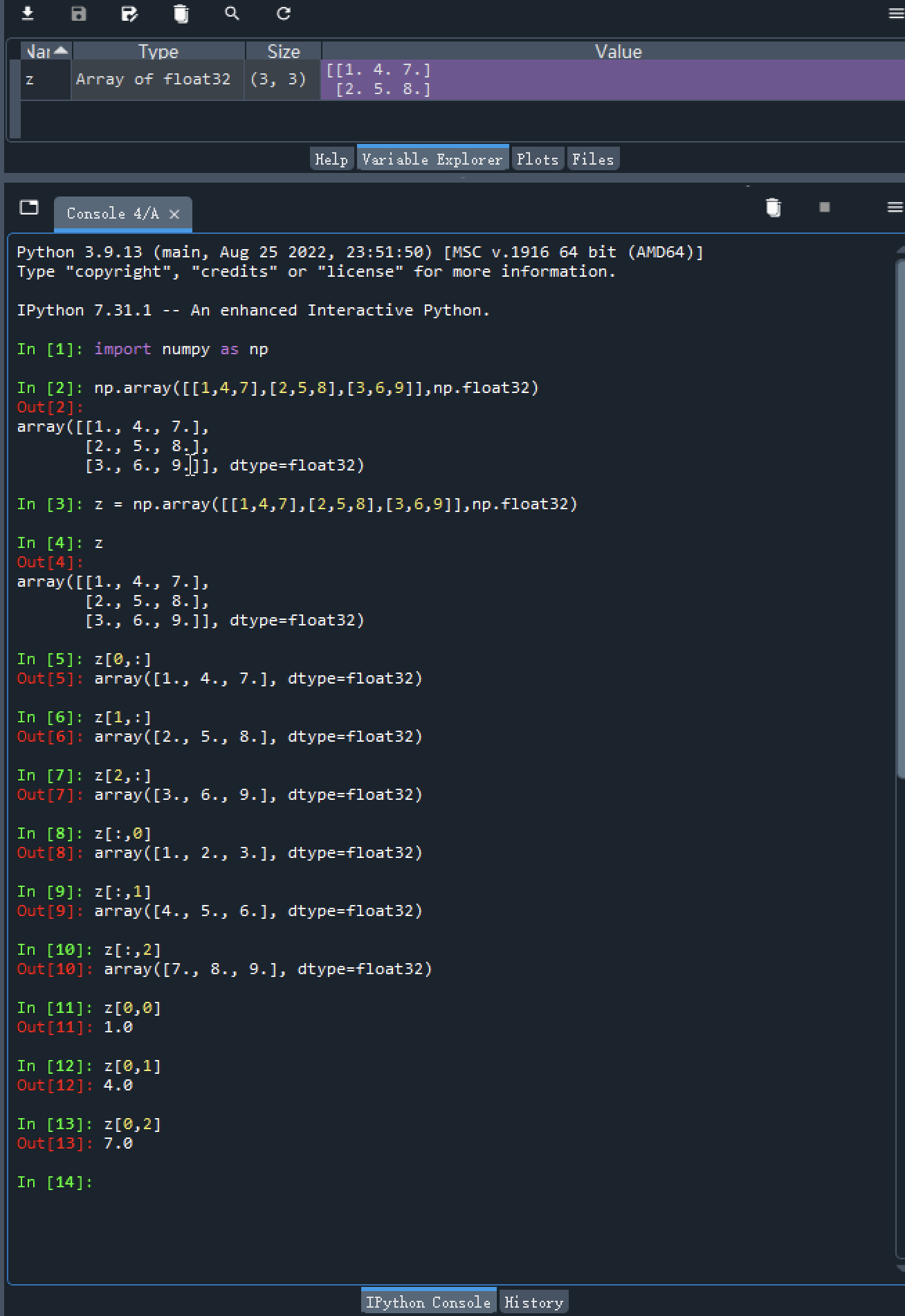
学习过STM32的同学都知道芯片上电后默认从Reset_Handler函数开始执行
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT SystemInit
IMPORT __main
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP上面的代码片段首先执行SystemInit函数,然后执行__main函数,__main函数里面执行一些分散加载的功能,最后调用main函数。
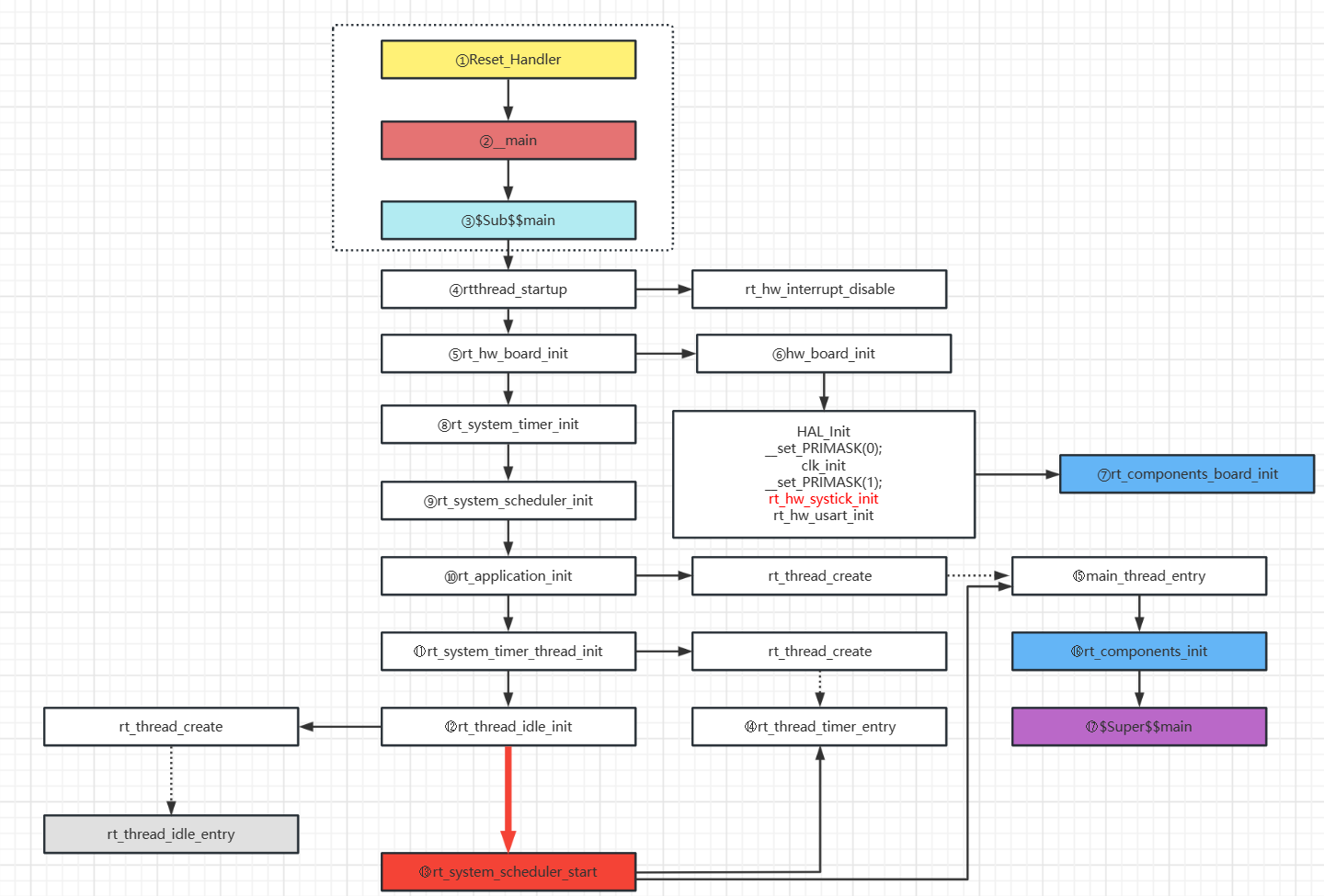
在RT-Thread中通过给main函数打补丁的方式在main函数执行之前做了一些系统初始化操作,包括时钟初始化、系统堆初始化、串口初始化、调度器初始化、软件定时器线程初始化,具体执行过程如上图所示。
#if defined(__CC_ARM) || defined(__CLANG_ARM)
extern int $Super$$main(void);
/* re-define main function */
int $Sub$$main(void)
{
rtthread_startup();
return 0;
}
#elif defined(__ICCARM__)
extern int main(void);
/* __low_level_init will auto called by IAR cstartup */
extern void __iar_data_init3(void);
int __low_level_init(void)
{
// call IAR table copy function.
__iar_data_init3();
rtthread_startup();
return 0;
}
#elif defined(__GNUC__)
/* Add -eentry to arm-none-eabi-gcc argument */
int entry(void)
{
rtthread_startup();
return 0;
}
#endif关于$Sub$$main和$Super$$main的机制请参考《Arm Keil通过$Super\$$和$Sub\$$给已有符号打补丁》
在OS创建的main_thread_entry主线程中在调用原本的main函数。
另外在启动过程中有个重要的组件初始化过程,至于其实现原理请参考《RT-Thread系列--组件初始化》

![[oeasy]python0051_ 转义_escape_字符_character_单引号_双引号_反引号_ 退格键](https://img-blog.csdnimg.cn/img_convert/5df40d17e1c9c8b4286963afc6cb5e06.png)