多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---高度控制
- 前言
- 构建软件框架
- 编译 cpp
- 构建代码
- main函数构建
- 构建类的定义
- 订阅无人机里程计信息
- 垂直位置控制
- 串级P控制
- 收敛结果
- 收敛过程
- 串级PID控制

前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、机上无人驾驶并可重复使用的飞行器,飞机通过机载的计算机系统自动对飞行的平衡进行有效的控制,并通过预先设定或飞机自动生成的复杂航线进行飞行,并在飞行过程中自动执行相关任务和异常处理。
在前面的博客中,分析了 rotors_simulator 一个开源的无人机gazebo的仿真系统的一个控制接口(roll、pitch、yawrate、thrust),并通过键盘发布控制指令,使飞机飞了起来,但是真正实验过的人则知道,起控制会飞常难,需要一直调整键盘,稍微一不注意,无人机就飞走了。
其原因就是这个接口在无人机内部并没有位置控制的闭环。
在这篇文章中,分析了自动控制原理;并在这篇文章中分析了无人机各种模式的控制框图。
本篇博客主要就是基于无人机的控制原理与控制框图,基于PID控制器,利用rotors_simulator 的控制接口,实现无人机的位置控制。
构建软件框架
编译 cpp
在cmakelists.txt中加入如下
add_executable(pid_position_controller_node
src/nodes/pid_position_controller_node.cpp)
add_dependencies(pid_position_controller_node ${catkin_EXPORTED_TARGETS})
target_link_libraries(pid_position_controller_node
roll_pitch_yawrate_thrust_controller ${catkin_LIBRARIES})
生成 pid_position_controller_node 可执行文件
构建代码
main函数构建
int main(int argc, char** argv) {
// 初始化节点
ros::init(argc, argv, "pid_position_controller_node");
// 终端输出开始信息
std::cout<< "pid position controll start" <<std::endl;
// 实例化 类
rotors_control::PidPositionControllerNode pid_position_controller_node;
ros::spin();
return 0;
}
main函数构建
- 初始化节点
- 终端输出开始信息
- 实例化 类
构建类的定义
新建pid_position_controller_node.h文件 并声明类
class PidPositionControllerNode{
public:
PidPositionControllerNode();
~PidPositionControllerNode();
private:
// 无人机控制用的里程计
EigenOdometry odometry_ ;
// 订阅里程计
ros::Subscriber odometry_sub_;
// 发布控制指令
ros::Publisher Control_RollPitchYawrateThrust_pub_;
// 里程计回调函数
void OdometryCallback(const nav_msgs::OdometryConstPtr& odometry_msg);
};
先完成一些 必要的变量和函数 定义 ,后续需要的内容再向里添加。
之后便可以做功能的设计开发了
订阅无人机里程计信息
// 订阅里程计 信息
odometry_sub_ = nh.subscribe("firefly/odometry_sensor1/odometry", 1,
&PidPositionControllerNode::OdometryCallback, this);
// 里程计信息 回调函数
void PidPositionControllerNode::OdometryCallback(const nav_msgs::OdometryConstPtr& odometry_msg) {
// 转成eigen 的里程计信息格式
EigenOdometry odometry;
eigenOdometryFromMsg(odometry_msg, &odometry);
double pos_x = odometry.position.x();
double pos_y = odometry.position.y();
double pos_z = odometry.position.z();
std::cout<< "pos x : "<<pos_x <<std::endl;
std::cout<< "pos y : "<<pos_y <<std::endl;
std::cout<< "pos z : "<<pos_z <<std::endl;
}
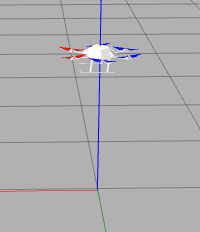
无人机位置如下:
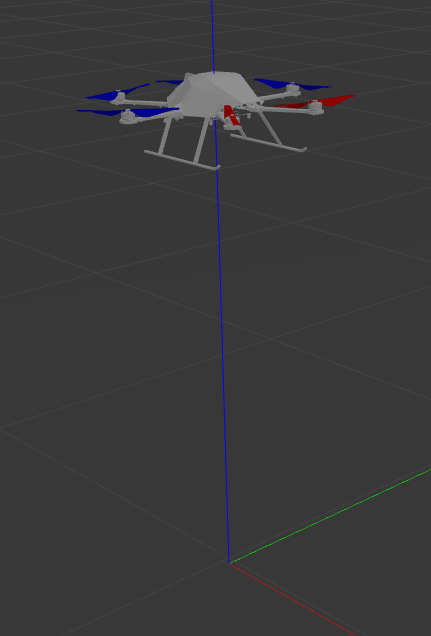
大约在 gazebo 坐标系下 (0,0,1)位置
终端打印信息:
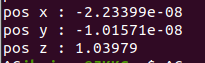
其中 EigenOdometry 里程计信息包括:
struct EigenOdometry {
EigenOdometry()
: position(0.0, 0.0, 0.0),
orientation(Eigen::Quaterniond::Identity()),
velocity(0.0, 0.0, 0.0),
angular_velocity(0.0, 0.0, 0.0) {};
EigenOdometry(const Eigen::Vector3d& _position,
const Eigen::Quaterniond& _orientation,
const Eigen::Vector3d& _velocity,
const Eigen::Vector3d& _angular_velocity) {
position = _position;
orientation = _orientation;
velocity = _velocity;
angular_velocity = _angular_velocity;
};
Eigen::Vector3d position;
Eigen::Quaterniond orientation;
Eigen::Vector3d velocity; // Velocity is expressed in the Body frame!
Eigen::Vector3d angular_velocity;
};
- 无人机位置 —gazebo 坐标系
- 无人机姿态四元数— 机体坐标系
- 无人机速度— 机体坐标系
- 无人机角速度— 机体坐标系
这部分相当于控制框图中的航姿参考系统,为控制器,提供无人机的实际位姿及各种信息。
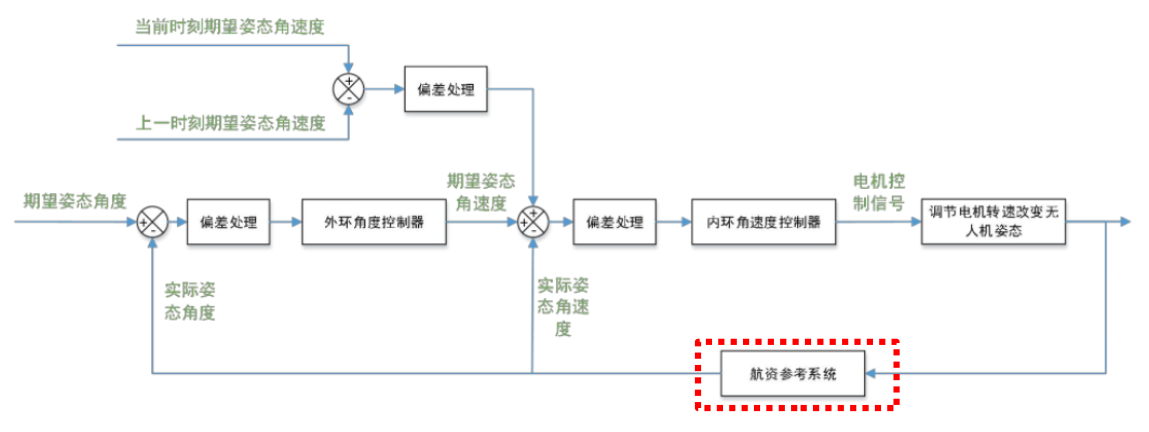
垂直位置控制
无人机的垂直位置控制的控制框图如下:
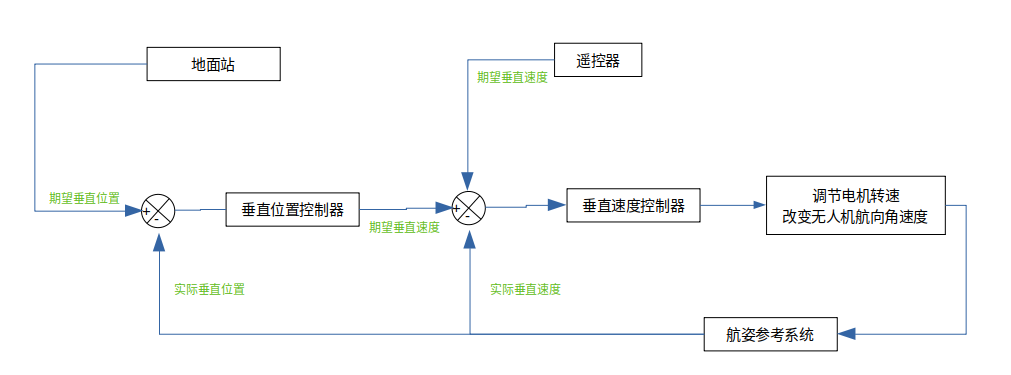
其框图的逻辑和原因,以在前文描述,这里不再赘述。
在框图中的遥控器输入期望速度,这可以放到后面再做,首先实现整体的控制回环。
串级P控制
首先实现一个简单的串级P控制
代码如下:
// 垂直方向位置控制
void PidPositionControllerNode::PosZControl(){
// 无人机期望 高度 先固定为1m
double pos_z_des = 1;
// 无人机当前高度
double pos_z_cur = odometry_.position.z();
// 高度差 期望减当前值
double pos_z_err = pos_z_des - pos_z_cur;
// 转为期望速度
// 垂直位置增益
float PID_POS_Z_GAIN = 1;
// 无人机期望速度
double vel_z_des = pos_z_err*PID_POS_Z_GAIN;
double vel_z_cur = odometry_.velocity.z();
// 速度偏差
double vel_z_err = vel_z_des - vel_z_cur;
// 悬停时增益
double loiter_thrust = 1.56779*9.81;
// 转为电机油门
// 垂直速度增益
float PID_VEL_Z_GAIN = 1;
double thrust_z = vel_z_err*PID_VEL_Z_GAIN+loiter_thrust;
std::cout<< "thrust_z : "<<thrust_z <<std::endl;
// 控制量
mav_msgs::RollPitchYawrateThrust roll_pitch_yawrate_thrust;
roll_pitch_yawrate_thrust.thrust.z= thrust_z;
Control_RollPitchYawrateThrust_pub_.publish(roll_pitch_yawrate_thrust);
}
期望位置固定为1,外环和内环的控制均为比例作用,先打通控制回环。
然后编译看下控制效果.
控制效果如下:
z轴 震荡 几次后 , 最终收敛
收敛结果

收敛过程
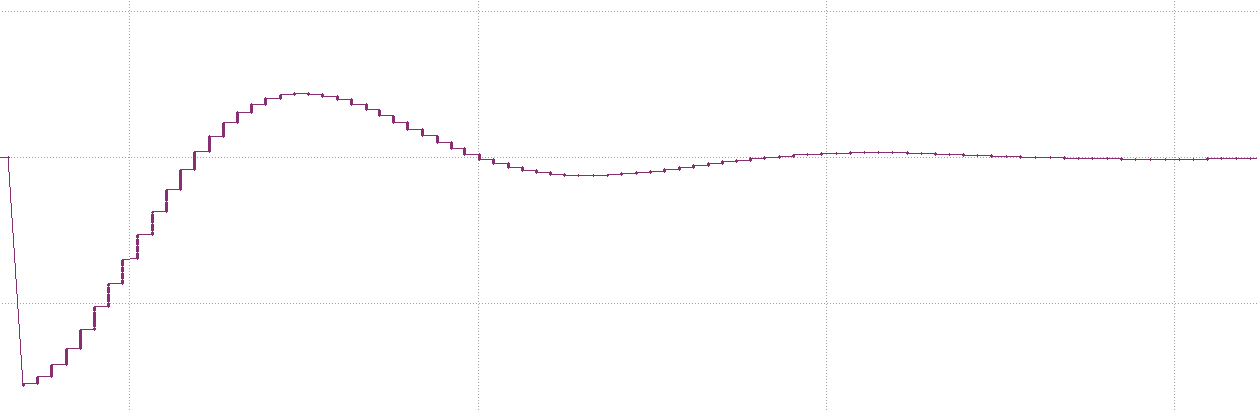
震荡约4次,存在一定稳态误差
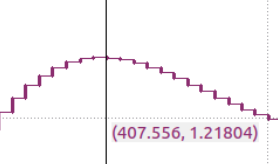
最大超调量约为0.2m
到达稳态时间约30s
稳态误差0.002m
串级PID控制
通过对上面收敛过程的分析,超调量比较大,收敛时间长,改善控制效果,适宜加入积分、微分环节。
向其中加入速度环加入pid控制器
详情参考古月居