高分辨汽车雷达点云成像和处理
摘要
汽车雷达具有体积小、硬件成本低、全天候工作、高分辨率等公认的优点,是高级驾驶辅助系统(ADAS)必不可少的一类重要传感器。然而,低角度分辨率和低成像性能的限制很难满足下一阶段ADAS的需要。新兴的4D成像雷达采用多芯片级联多输入多输出(MIMO)技术,可以在方位角和仰角尺寸上实现高分辨率,提供高质量的三维点云图像。本文提出了一种集成高分辨率MIMO雷达点云成像与处理的新算法。首先,我们对称地研究了MIMO雷达技术,将其分为三种主要模式:TDM-MIMO,相位编码MIMO, DDM-MIMO。特别地,我们设计了一个用于点云成像的混合TDM-DDM-MIMO框架。最后进行了仿真实验分析,验证了该方法的有效性。
1 介绍
汽车雷达是雷达技术中最有前途、发展最快的民用雷达技术。作为任何自动驾驶汽车传感套件的关键组件,汽车雷达在汽车工程师协会(SAE)定义的二级和三级(L2/L3)自动驾驶中发挥着重要作用。然而,为了满足L4/L5级自动驾驶的进一步要求和ADAS的进步,汽车雷达势必会进行进一步的技术创新。与其他车载传感器,如摄像头和激光雷达相比,汽车雷达在距离和速度上都具有高分辨率,但在角度估计和目标分类方面表现较差。如图1所示,显然是要找出这三种传感器的优缺点。下一代汽车雷达的主要问题是实现高角度分辨率和分类能力,以获得类似相机激光雷达的性能。

图1 摄像头/激光雷达/毫米波雷达对比
高分辨率4D雷达是最先进的汽车雷达,采用多芯片级联MIMO技术,可以在方位角和仰角维度实现高分辨率,并提供高质量的三维点云图像。为了提高角度分辨率,一种常用的方法是采用MIMO技术,该技术可以方便地利用集成在车辆上的少量发射和接收天线获得大阵列孔径。同时,采用多芯片级联技术更是雪上加霜,如汽车雷达芯片一般包括3个发射和4个接收通道,采用MIMO技术可以理想地合成3 × 4个虚拟阵列,而采用4芯片级联MIMO方案将扩展到12 × 16个虚拟阵列。
采用MIMO技术的汽车雷达虚拟阵列合成依赖于不同天线发射信号的分离。当不同天线的发射信号正交时,分离更容易。实现波形正交性最简单的方法是TDMA,因此TDM-MIMO雷达因其实现简单和高正交性而成为应用最广泛的方法[1-3]。然而,正是发射功率的低效率限制了最大探测距离,而最大不模糊速度、距离分辨率和可用正交信号数之间的矛盾往往难以消除。采用码分多址(CDMA)技术的相位编码MIMO雷达可以在不牺牲发射功率、带宽或chirp持续时间的情况下有效地实现低互相关波形[4-6]。由于不存在具有理想自相关和互相关特性的理想正交码序列,因此相位编码波形有时只是近似地满足正交性要求。在DDM-MIMO雷达系统中,每个发射机在一个小的、唯一的频率偏移处发射一个相同的频率斜坡[7-10],这有效地分离了多普勒频谱中的每个发射信号,等于波形正交性。然而,由于多普勒偏移较小,额外扩展的目标很容易重叠,导致发射机之间的耦合。
高分辨率4D雷达的波形正交性直接关系到目标检测性能和提供高质量三维点云图像的能力。对相关技术进行总结和进一步研究具有重要意义。
本文的其余部分组织如下。TDM-MIMO、相位编码MIMO、DDM-MIMO技术在第2节中进行了综述。第3节详细描述了提出的TDM-DDM-MIMO框架。此外,在第4节中,对TDM-DDM-MIMO框架的性能进行了实际汽车雷达的实验。最后,第5节对本文进行总结。
2 使用MIMO技术的汽车雷达
MIMO雷达系统采用多个发射器、多个接收器和多个波形来利用所有可用的自由度[11]。如图2所示,采用MIMO技术得到的虚拟天线阵孔径明显大于实际天线阵尺度。合成虚拟阵元等于MIMO数据矩阵中的信道数。利用具有数十或数百个虚拟天线的虚拟阵列,即MIMO雷达的可用自由度,可以有效地实现方位角和仰角尺寸的高分辨率。
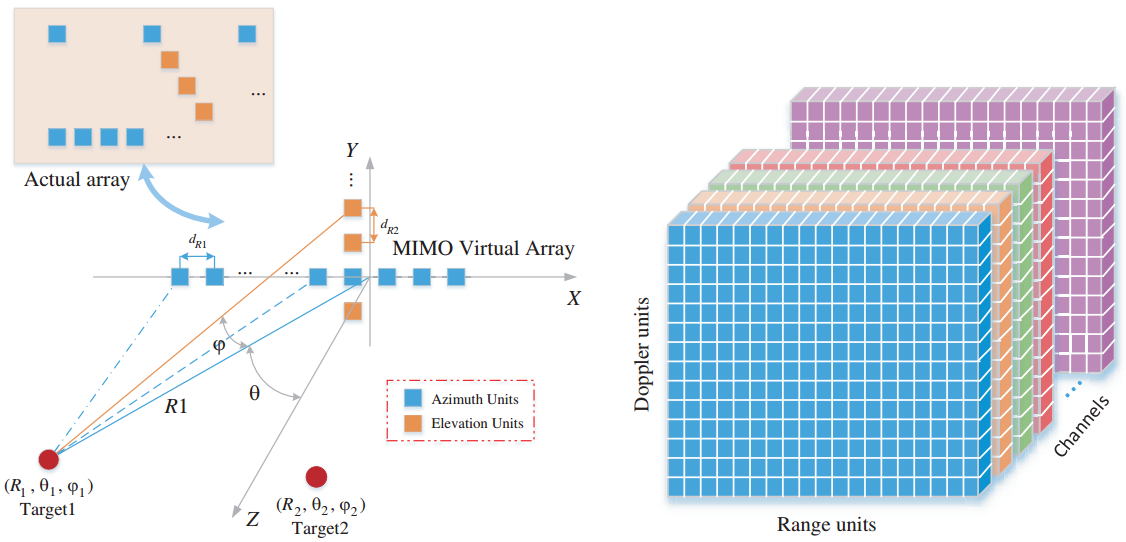
图2 有虚拟孔径和多通道数据矩阵的MIMO雷达
在最先进的4D雷达设计中,大陆、TI等知名公司采用了多芯片级联MIMO技术,从其参数设计中可以明确推断。例如,参考大陆BU-ADAS第五代雷达系统高级型号(ARS540和ARS548)的技术产品规范,天线阵列设计包括12TX和16RX,共28个物理通道可合成192个虚拟通道,确保方位角和仰角分别达到1.2度和2.3度的高分辨率。
为了充分发挥MIMO的能力,获得准确的DOA估计,MIMO的前提是实现波形正交性。下面将介绍MIMO技术的主要波形正交性技术,包括TDM-MIMO、相位编码MIMO和DDM-MIMO。
2.1 TDM-MIMO技术
在TDM-MIMO雷达中,每个时隙只安排一个发射天线进行发射。如图3(a)所示,典型的汽车TDM-MIMO雷达波形为3个发射天线和4个接收天线,其中3个发射天线交替发射调频连续波(FMCW)chirp。因此,每个接收天线并行接收回波,任何两个传输之间没有重叠。这种TDM-MIMO雷达发射技术可以实现理想的波形正交性,并且在各种方法中实现最简单。
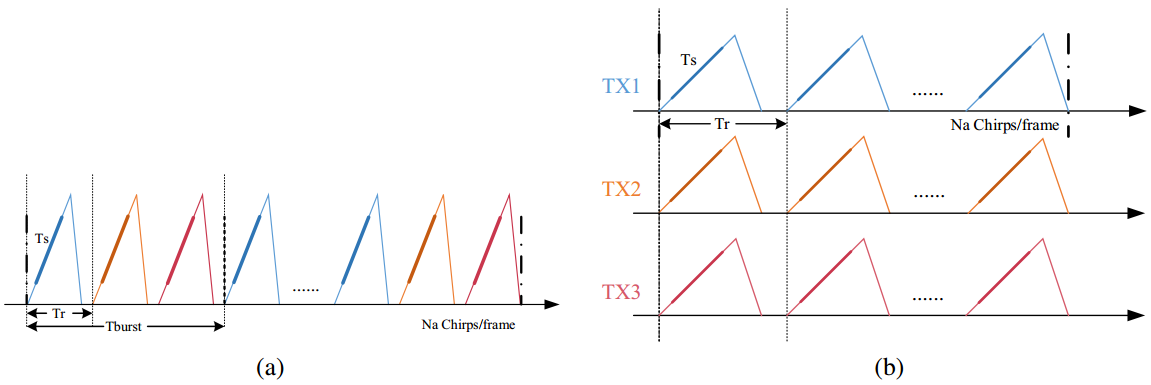
图3 典型汽车波形:(a)TDM-MIMO,(b)多天线同步发射
缺点与优点并存,TDM-MIMO雷达获得了理想的波形正交性,但失去了MIMO雷达的可用传输能力[11]。与所有发射天线同时发射信号的MIMO雷达相比,这种替代性发射TDM-MIMO雷达的发射功率损失较大,只适用于近距离探测。
此外,随着TDMA的增加,同一发射机发射的chirp间隔时间增加,Vmax =±λ/4·PRF =±λ/(4·TBurst)计算的最大无模糊速度减小。对各距离单元之间的Na个chrip进行多普勒FFT时,多普勒频谱表征的速度范围为最大无模糊速度±Vmax。一旦目标速度超过±Vmax,多普勒频谱将被折叠,目标在距离多普勒图像上重叠的概率增大,这将极大地影响目标检测和点云的产生。此外,TDMA-MIMO雷达还需要对运动目标在chirp之间的位置变化引起的相移进行补偿。
具体的例子将进一步说明TDM-MIMO雷达的缺点。参考ARS540雷达传感器,其特征设计包括0.2 ~ 300 m的距离,0.22 m的距离分辨率和−400 ~ 200 km/h的无模糊速度范围。此外,根据NXP的76 ~ 78 GHz汽车雷达收发器TEF810X产品数据表,TEF810X由3个发射链和4个接收链组成,每个接收链包含一个12位SAR ADC采样,有效速率为40 MS/s(每秒M个采样)。一旦将TEF810X应用于汽车雷达系统以满足ARS540中提到的特性设计,则长度Nr至少应为2048,chirp周期Tr约为60µs,触发周期TBurst达到180µs,不模糊速度±Vmax约为±5.4 m/s。虽然后续信号处理有很多方法可以解决速度模糊问题,但频谱折叠导致的目标检测难度仍然很严重,发射天线越多,情况就越糟糕。
2.2 相位编码MIMO技术
为了充分发挥MIMO雷达的传输能力,同时实现波形正交性,对相位编码MIMO雷达进行了广泛的研究。如图3(b)所示,相位编码MIMO雷达与一个相位码相乘后,与所有发射天线同时发射相同的FMCW波形,每个天线的相位码不同,在脉冲之间变化。一些文章习惯于将该技术命名为CDM-MIMO,但根据MIMO雷达中使用的一些代号DDM-MIMO代替CDM-MIMO,如Hadamard码,本文将其通称为相位编码MIMO雷达。在后面的部分将重点介绍DDM-MIMO雷达的特点。
相位编码MIMO雷达的关键组成部分,多个编码族,如Gold码[12,13],Hadamard码[7,14]和Chu码[8,15]被证明可以实现充分的正交性。由于自相关尤其是互相关特性决定了波形之间的正交性,因此选择高性能的码序成为主要的研究方向。
在很多情况下,事物都有明确的上限,相互关联的性质也不例外。研究表明,长度为N的码序列的最大自相关值为N,两个长度为N的码序列的理想互相关值为![]() 。因此,在理想情况下,当前传输的信号相对于其他信号的最大功率增益为
。因此,在理想情况下,当前传输的信号相对于其他信号的最大功率增益为![]() 。对于上述理想推导,对于长度N = 512的码序列集,可实现的最大波形衰减约为27.1 dB[8]。更具体地说,一个素数长度为521的Chu编码被截断为长度N = 512,波形衰减约为26.4 dB。
。对于上述理想推导,对于长度N = 512的码序列集,可实现的最大波形衰减约为27.1 dB[8]。更具体地说,一个素数长度为521的Chu编码被截断为长度N = 512,波形衰减约为26.4 dB。
相位编码MIMO雷达的主要问题是干扰的多普勒FFT会分布到整个多普勒频谱中,如图4所示。最严重的后果是微弱的目标信号会淹没在干扰信号中,更具体地说,当有卡车和行人在同一距离单位时,行人很可能无法被检测到。一旦采用相位编码MIMO雷达,首先要确定编码序列的长度和波形衰减的上限,以确定雷达性能是否满足应用要求。此外,发射天线同时发射量的增加将直接影响相位编码MIMO雷达的性能。

图4 四天线同时发射的相位编码MIMO的R-D图像。(a)长度为128的Gold序列。(b)长度为128的Chu序列。
2.3 DDM-MIMO技术
与前面提到的相位编码MIMO雷达类似,特殊的DDM-MIMO雷达采用相同的波形传输方向图,但具有独特的编码序列。更具体地说,每个天线发射的信号是由一个均匀增加的相序列在不同步长下调制的,例如,[0,π/2, π, 3π/ 2,0,…],[0,π, 0, π,…]等等,这也可以被识别为每个发射机之间的唯一频率偏移[7]。上面提到的Hadamard码序列实际上是一种相位码,但它与DDM-MIMO波形具有相同的特征。
DDM-MIMO雷达具有与一般相位编码MIMO雷达完全不同的现象,即干扰的多普勒FFT散射在整个多普勒频谱上。以具有2个发射天线和4个接收天线的DDM-MIMO雷达为例,2个发射天线分别与[0,0,0,0,…]和[0,π/2,π,3π/ 2,0,0,…]脉冲相乘,同时发射相同的FMCW波形。特殊的DDM-MIMO雷达使干扰集中在一个与实际目标位置相关的独特位置,其幅值几乎相同,如图5(a)所示。图5(b)显示了3个发射天线分别与[0,0,0,…]、[0,π/2,π,3π/2,…]和[0,π,0,π,…]脉冲相乘后同时发射信号的情况。
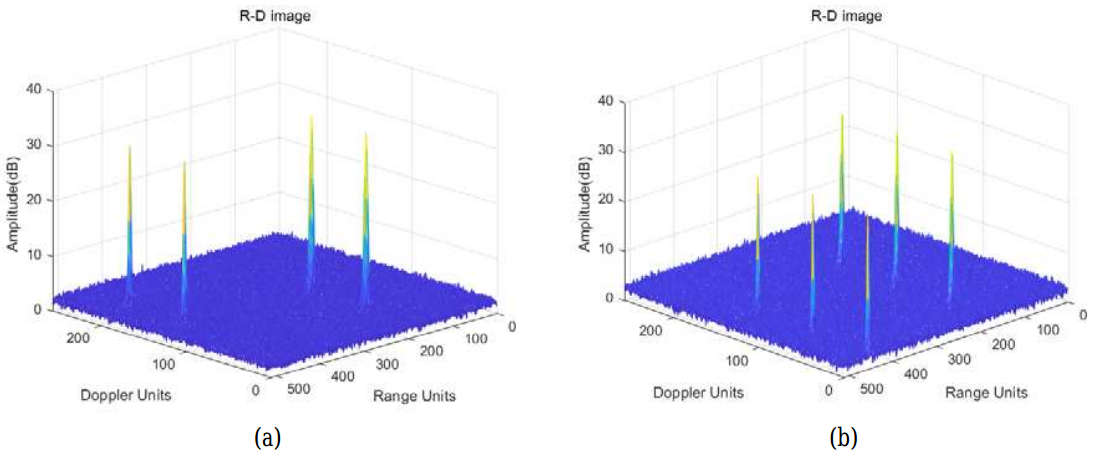
图5 DDM-MIMO的R-D图像。(a)两天线同时发射。(b)三天线同时发射。
尽管通过以不同的多普勒频移调制每个发射单元在多普勒域中实现了波形正交性[10],但DDM-MIMO雷达技术存在一些缺点,限制了其在汽车雷达中的应用。在多目标情况下,每个目标都会在距离多普勒图像中产生一个真实位置,但在同一距离单位之间会产生Ntx干扰。当存在多个相同距离但不同速度的目标时,会产生混淆真实目标和干扰的问题。因此,如何减轻多目标场景下干扰引起的虚警是关键问题。
表1总结了TDM-MIMO、相位编码MIMO、DDM-MIMO技术的特性。
表1 DDM-MIMO、相位编码MIMO、DDM-MIMO技术总结
| 波形正交技术 | 优点 | 缺点 |
| TDM-MIMO | 最佳波形正交 低距离/多普勒旁瓣 | 发射功率损失 受限的多普勒不模糊性 |
| 相位编码MIMO | 受限的波形正交 低距离旁瓣 | 高多普勒旁瓣 难以检测微弱目标 |
| DDM-MIMO | 良好波形正交性 低距离/多普勒旁瓣 | 多目标场景高虚警率 |
3 TDM-DDM-MIMO技术
根据上述介绍和分析,仅采用其中一种波形正交技术来完成4D高分辨率成像汽车雷达的设计几乎是不可能的。本文设计了一种混合TDM-DDM-MIMO框架,以获得折衷的性能。
TDM-DDM-MIMO技术利用了TDMA和DDMA的最佳波形正交性,多个发射天线同时发射信号也可以减少能量损失。当采用与ARS540相同的4片级联MIMO技术,最多12个发射天线时,TDM-DDM-MIMO框架可以设置为2个发射天线同时活动或使用DDMA编码方式的更多选项。但是,不建议同时使用4个以上的发射天线进行发射,因为干扰会严重影响目标探测性能。与TDM-MIMO技术相比,TDM-DDM-MIMO中距离多普勒图像所代表的速度将由单chirp周期内发射天线的数量决定提高数倍,干扰的影响更为严重。
图6(a)显示了单次chirp期间只有2个发射机活动的TDM-DDM-MIMO汽车波形。2天线发射的信号分别由相位码[0,0,0,0,…]和[0,π /2,π,3π/2,…]调制,并在接收机上通过乘以相位码的共轭进行解码,从而将接收到的信号分离为两个信号,用于不同的MIMO信道。在两个不同信道的数据上使用多普勒FFT,干扰和目标将在多普勒域中有规律地分布,如图6(b)所示。在目标检测中,可以熟练地利用图6所示的特性来区分目标和干扰,因为目标在两个通道的距离多普勒图像上的坐标是相同的,但干扰位于通道之间目标的不同侧面。
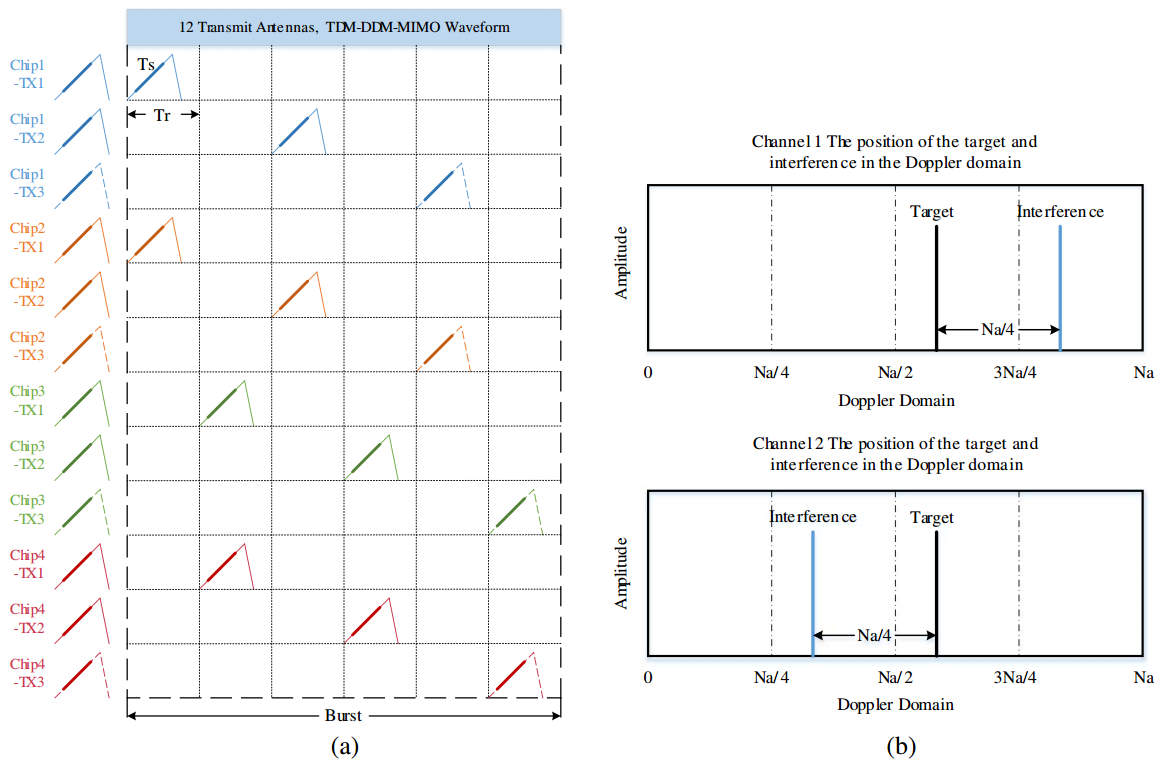
图6 (a)TDM-DDM-MIMO汽车波形。(b)目标和干扰在多普勒域的位置。
有两种特殊情况,当两个目标在多普勒域的坐标间距为Na/4或Na/2时,Na为慢时间采样点。在采用上述目标检测方法时,会出现假目标和对真实目标估计不准确的问题。因此,需要添加更多的信息来区分目标和干扰,如信号幅度、相位信息等。
4 仿真
为了验证TDM-DDM-MIMO框架的有效性,参考大陆公司的高分辨率4D雷达ARS540的技术参数。采用图6(a)所示的TDM-DDM-MIMO波形和相位码[0,0,0,…],[0,π/2,π,3π/2,…]。仿真中的主要参数设置如下:
为了满足雷达技术参数,如方位角分辨率和仰角分辨率的要求,我们设计了一个包含12个发射天线和16个接收天线的MIMO阵列。在方位角方向合成的虚拟阵列长度达到165.8 mm,在仰角方向合成的阵列孔径达到86.5 mm。此外,模拟了7个目标,距离为{40、50、85、116、127、175、175}m,速度为{−14、−9、6、11、22、17、−7}m/s,方位角为{−47、−15、49、9、34、27、−25}度,仰角为{−7、−2、2、5、4、−3}度。
根据表2中的雷达参数,距离-多普勒图像表示的速度约为±5.1 m/s,主要受ADC采样频率的限制。经过DDM编码解码后,将192个MIMO信道分成两部分,分别采用距离多普勒FFT得到如图7所示的距离多普勒图像。很明显,两幅距离多普勒图像的目标位于同一坐标,但图像之间的干扰位于目标的不同侧面。对两幅距离多普勒图像进行恒虚警率(CFAR)匹配后,目标如图8(a)所示。
表2 雷达系统参数和说明
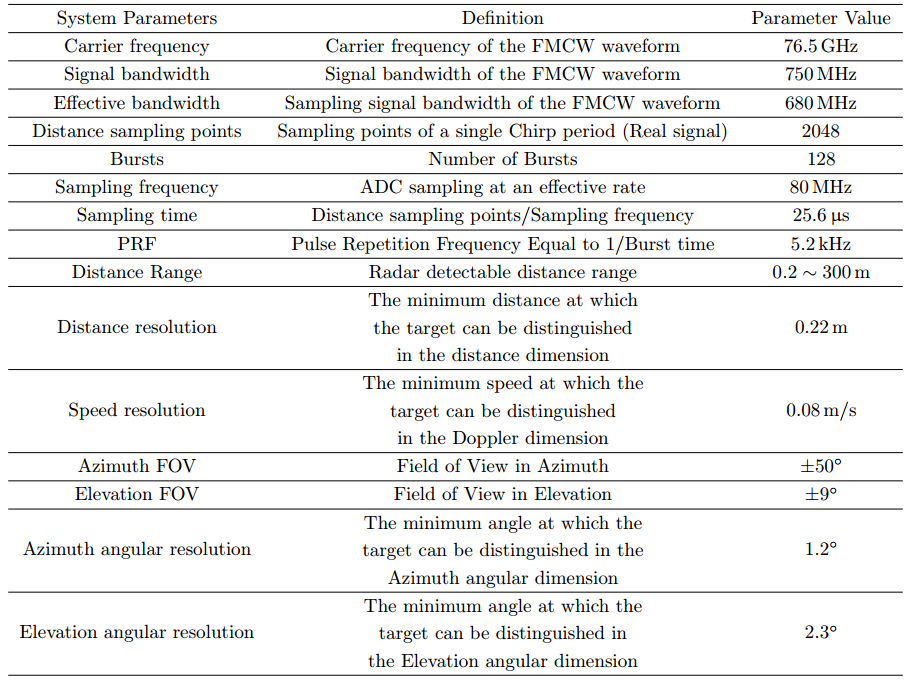
最后,估计匹配目标的距离、速度、方位角、仰角等参数,以及实际目标和探测后目标的位置如图8(b)所示。

图7 (a)MIMO通道1的距离多普勒图像。(b)MIMO通道2的距离多普勒图像。
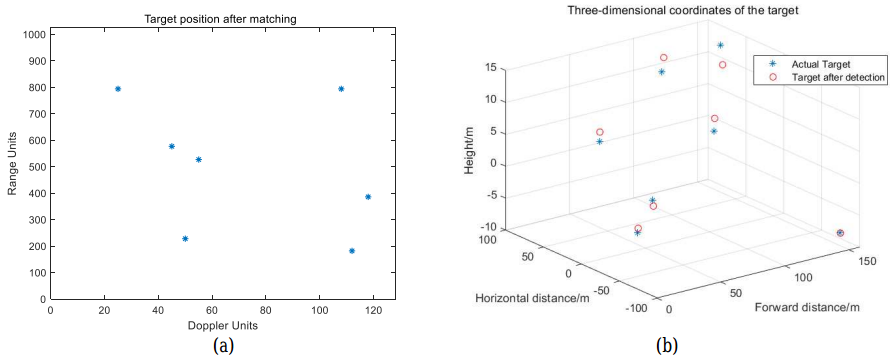
图8 (a)经过CFAR和匹配后的目标。(b)目标的三维坐标。
5 结论
本文详细研究了波形正交性作为高分辨率4D雷达获得高角分辨率和高质量点云图像的前提条件。讨论了MIMO的主要波形正交性技术,包括TDM-MIMO、相位编码MIMO和DDM-MIMO。此外,对各种技术的优缺点进行了分析和总结。特别地,本文提出了一种TDMA -DDM-MIMO混合框架,通过TDMA与DDMA的集成有效地实现了波形正交性。同时,TDM-DDM-MIMO具有比TDM-MIMO更大的最大无模糊速度,但存在多天线干扰。最后,针对ARS540的技术参数进行了仿真,并通过实验结果验证了TDM-DDM-MIMO方法的有效性。在目标与干扰混淆的多目标场景下进行性能评估,采用更多的信息来区分目标与干扰,是我们未来工作的主题。



![[C++] const 成员函数](https://img-blog.csdnimg.cn/direct/884b272cec4f4d5294564e1403901c3b.png)