任务

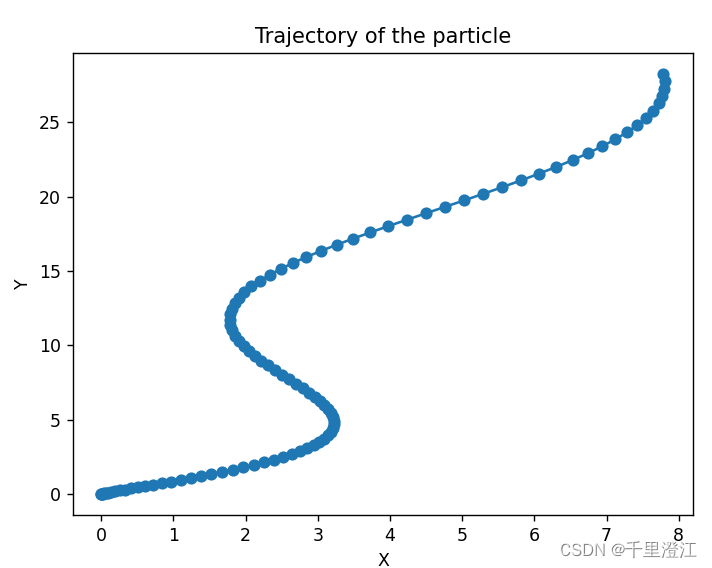
- 输出质点的轨迹 ( x ( t ) , y ( t ) ) , t ∈ { 0.1 , 0.2 , 0.3 , . . . , 10 } (x(t), y(t)), t\in \{0.1, 0.2, 0.3, ..., 10\} (x(t),y(t)),t∈{0.1,0.2,0.3,...,10},并在二维平面中画出该轨迹.
- 请比较M分别取4, 8, 12, 16, 20 时,Romberg积分达到要求精度的比例(达到误差要求的次数/调用总次数),分析该比例随M 的变化。
算法
现在要用数值方法求 ∫ a b f ( x ) d x \int_{a}^{b} f(x) \, dx ∫abf(x)dx,设 h = b − a n h=\frac{b-a}{n} h=nb−a,已知:
复化梯形积分 T n ( f ) = h [ 1 2 f ( a ) + ∑ i = 1 n − 1 f ( a + i h ) + 1 2 f ( b ) ] T_{n}\left(f\right)=h\left[\frac{1}{2}f\left(a\right)+\sum_{i=1}^{n-1}f\left(a+ih\right)+\frac{1}{2}f\left(b\right)\right] Tn(f)=h[21f(a)+∑i=1n−1f(a+ih)+21f(b)]、
复化Simpson积分 S n ( f ) = h 3 [ f ( a ) + 4 ∑ i = 0 m − 1 f ( x 2 i + 1 ) + 2 ∑ i = 1 m − 1 f ( x 2 i ) + f ( b ) ] S_{n}\left(f\right)=\frac{h}{3}\left[f\left(a\right)+4\sum_{i=0}^{m-1}f\left(x_{2i+1}\right)+2\sum_{i=1}^{m-1}f\left(x_{2i}\right)+f\left(b\right)\right] Sn(f)=3h[f(a)+4∑i=0m−1f(x2i+1)+2∑i=1m−1f(x2i)+f(b)].
将
(
T
n
(
f
)
−
T
2
n
(
f
)
)
( T_n( f) - T_{2n}( f) )
(Tn(f)−T2n(f)) 作 为
T
2
n
(
f
)
T_{2n}(f)
T2n(f)的修正值补充到
I
(
f
)
I(f)
I(f),即
I
(
f
)
≈
T
2
n
(
f
)
+
1
3
(
T
2
n
(
f
)
−
T
n
(
f
)
)
=
4
3
T
2
n
−
1
3
T
n
=
S
n
I(f)\approx T_{2n}(f)+\frac{1}{3}\left(T_{2n}\left(f\right)-T_{n}\left(f\right)\right)=\frac{4}{3}T_{2n}-\frac{1}{3}T_{n}=S_{n}
I(f)≈T2n(f)+31(T2n(f)−Tn(f))=34T2n−31Tn=Sn
其结果是将复化梯形求积公式组合成复化 Simpson 求积公式, 截断误差由 O ( h 2 ) O(h^2) O(h2)提高到 O ( h 4 ) O(h^4) O(h4),这种手段称为外推算法,该算法在不增加计算量的前提下提高了误差的精度.不妨对 S 2 n ( f ) , S n ( f ) S_{2n}(f),S_n(f) S2n(f),Sn(f)再作一次线性组合:
I
(
f
)
−
S
n
(
f
)
=
−
f
(
4
)
(
ξ
)
180
h
4
(
b
−
a
)
≈
d
h
4
I\left(f\right)-S_{n}\left(f\right)=-\frac{f^{\left(4\right)}\left(\xi\right)}{180}h^{4}\left(b-a\right)\approx dh^{4}
I(f)−Sn(f)=−180f(4)(ξ)h4(b−a)≈dh4
I
(
f
)
−
S
2
n
(
f
)
=
−
f
(
4
)
(
η
)
180
(
h
2
)
4
(
b
−
a
)
≈
d
(
h
2
)
4
I(f)-S_{2n}(f)=-\frac{f^{(4)}(\eta)}{180}\left(\frac{h}{2}\right)^{4}(b-a)\approx d\left(\frac{h}{2}\right)^{4}
I(f)−S2n(f)=−180f(4)(η)(2h)4(b−a)≈d(2h)4
I
(
f
)
≈
S
2
n
(
f
)
+
1
15
(
S
2
n
(
f
)
−
S
n
(
f
)
)
=
C
n
(
f
)
I\left(f\right)\approx S_{2n}\left(f\right)+\frac{1}{15}\left(S_{2n}\left(f\right)-S_{n}\left(f\right)\right)=C_{n}\left(f\right)
I(f)≈S2n(f)+151(S2n(f)−Sn(f))=Cn(f)
复化 Simpson 公式组成复化 Cotes 公式,其截断误差是
O
(
h
6
)
.
O(h^6).
O(h6).同理对 Cotes公式进行线性组合:
I
(
f
)
−
C
2
n
(
f
)
=
e
(
h
2
)
6
I
(
f
)
−
C
n
(
f
)
=
e
h
6
I\left(f\right)-C_{2n}\left(f\right)=e\left(\frac{h}{2}\right)^{6}\\I\left(f\right)-C_{n}\left(f\right)=eh^{6}
I(f)−C2n(f)=e(2h)6I(f)−Cn(f)=eh6
得到具有 7 次代数精度和截断误差是
O
(
h
8
)
O(h^8)
O(h8)的 Romberg 公式:
R
n
(
f
)
=
C
2
n
(
f
)
+
1
63
(
C
2
n
(
f
)
−
C
n
(
f
)
)
R_{n}\left(f\right)=C_{2n}\left(f\right)+\frac{1}{63}\left(C_{2n}\left(f\right)-C_{n}\left(f\right)\right)
Rn(f)=C2n(f)+631(C2n(f)−Cn(f))
为了便于在计算机上实现 Romberg 算法,将
T
n
,
S
n
,
C
n
,
R
n
,
⋯
T_n,S_n,C_n,R_n,\cdots
Tn,Sn,Cn,Rn,⋯统一用
R
k
,
j
R_{k,j}
Rk,j 表示,列标
j
=
1
,
2
,
3
,
4
j=1,2,3,4
j=1,2,3,4分别表示梯形、Simpson、Cotes 、Romberg积分,行标
k
k
k表示步长
h
k
=
h
2
k
−
1
h_k=\frac h{2^{k-1}}
hk=2k−1h,得到Romberg 计算公式:
R
k
,
j
=
R
k
,
j
−
1
+
R
k
,
j
−
1
−
R
k
−
1
,
j
−
1
4
j
−
1
−
1
,
k
=
2
,
3
,
⋯
R_{k,j}=R_{k,j-1}+\frac{R_{k,j-1}-R_{k-1,j-1}}{4^{j-1}-1},k=2,3,\cdots
Rk,j=Rk,j−1+4j−1−1Rk,j−1−Rk−1,j−1,k=2,3,⋯
对每一个
k
,
j
k,j
k,j从 2 做到
k
k
k,一直做到
∣
R
k
,
k
−
R
k
−
1
,
k
−
1
∣
|R_k,k-R_{k-1,k-1}|
∣Rk,k−Rk−1,k−1∣小于给定控制精度时停止计算.
注:下面代码中数组下标从0开始.
代码
C++实现Romberg积分运算
#include<bits/stdc++.h>
using namespace std;
int satisfiedCount;
long double ax(long double t);
long double ay(long double t);
long double romberg(function<long double(long double)> f, long double a, long double b, long double eps, int maxIter, bool isX);// Perform the Romberg integration
int main()
{
long double eps = 1e-6, proportion;
int maxIter;
satisfiedCount = 0;
maxIter = 4;
cout << "maxIter = " << maxIter << endl;
for (long double t = 0.1; t <= 10; t += 0.1)
{
long double vx = romberg(ax, 0, t, eps, maxIter, 0);
long double vy = romberg(ay, 0, t, eps, maxIter, 0);
long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);
long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);
cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;
}
proportion = (long double)satisfiedCount / 100;
cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;
satisfiedCount = 0;
maxIter = 8;
cout << "maxIter = " << maxIter << endl;
ofstream outFile("trajectory.txt");
for (long double t = 0.1; t <= 10; t += 0.1)
{
long double vx = romberg(ax, 0, t, eps, maxIter, 0);
long double vy = romberg(ay, 0, t, eps, maxIter, 0);
long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);
long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);
cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;
outFile << fixed << setprecision(6) << x << " " << y << "\n";//把坐标写入文件,方便画轨迹
}
proportion = (long double)satisfiedCount / 100;
cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;
satisfiedCount = 0;
maxIter = 12;
cout << "maxIter = " << maxIter << endl;
for (long double t = 0.1; t <= 10; t += 0.1)
{
long double vx = romberg(ax, 0, t, eps, maxIter, 0);
long double vy = romberg(ay, 0, t, eps, maxIter, 0);
long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);
long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);
cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;
}
proportion = (long double)satisfiedCount / 100;
cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;
satisfiedCount = 0;
maxIter = 16;
cout << "maxIter = " << maxIter << endl;
for (long double t = 0.1; t <= 10; t += 0.1)
{
long double vx = romberg(ax, 0, t, eps, maxIter, 0);
long double vy = romberg(ay, 0, t, eps, maxIter, 0);
long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);
long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);
cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;
}
proportion = (long double)satisfiedCount / 100;
cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;
satisfiedCount = 0;
maxIter = 20;
cout << "maxIter = " << maxIter << endl;
for (long double t = 0.1; t < 10.1; t += 0.1)
{
long double vx = romberg(ax, 0, t, eps, maxIter, 0);
long double vy = romberg(ay, 0, t, eps, maxIter, 0);
long double x = romberg([&](long double t) { return vx; }, 0, t, eps, maxIter, 1);
long double y = romberg([&](long double t) { return vy; }, 0, t, eps, maxIter, 0);
cout << fixed << setprecision(1) << "At t = " << t << ", vx = " << setprecision(6) << vx << ", vy = " << setprecision(6) << vy << ", " << "(x, y) = (" << setprecision(6) << x << ", " << setprecision(6) << y << ")" << endl;
}
proportion = (long double)satisfiedCount / 100;
cout << "At maxIter = " << maxIter << ", proportion of times the error requirement of x was satisfied: " << proportion << endl;
return 0;
}
long double ax(long double t)
{
return sin(t) / (1 + sqrt(t));
}
long double ay(long double t)
{
return log(t + 1) / (t + 1);
}
// Perform the Romberg integration
long double romberg(function<long double(long double)> f, long double a, long double b, long double eps, int maxIter, bool isX) {
long double h[maxIter], r[maxIter][maxIter];
h[0] = b - a;
r[0][0] = 0.5 * h[0] * (f(a) + f(b));
for (int i = 1; i < maxIter; i++)
{
h[i] = 0.5 * h[i-1];
long double sum = 0;
for (int k = 0; k < pow(2, i-1); k++)
sum += f(a + (2*k+1) * h[i]);
r[i][0] = 0.5 * r[i-1][0] + h[i] * sum;
for (int j = 1; j <= i; j++)
r[i][j] = r[i][j-1] + (r[i][j-1] - r[i-1][j-1]) / (pow(4, j) - 1);
if (i > 1 && fabs(r[i][i] - r[i-1][i-1]) < eps)
{
if(isX)
satisfiedCount++;
return r[i][i];
}
}
return r[maxIter-1][maxIter-1];
}
python可视化运动轨迹
import matplotlib.pyplot as plt
with open('trajectory.txt', 'r') as file:
lines = file.readlines()
x, y = zip(*[(float(line.split()[0]), float(line.split()[1])) for line in lines])
plt.plot(x, y, 'o-')
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Plot of points with smooth curve')
plt.show()
结果
部分运算结果

轨迹可视化结果





![[Kubernetes] KubeKey 部署 K8s v1.28.8](https://img-blog.csdnimg.cn/direct/ca3da4b809b0462d8ce13daac6a7b135.png)


![[机器学习系列]深入探索回归决策树:从参数选择到模型可视化](https://img-blog.csdnimg.cn/direct/9df745e515bf470a80af295fad4105a2.png)