一、GAN网络概述
GAN:生成对抗网络。GAN网络中存在两个网络:G(Generator,生成网络)和D(Discriminator,判别网络)。
Generator接收一个随机的噪声z,通过这个噪声生成图片,记做G(z)
Discriminator功能是判别一张图片的真实。它的输入是一张图片x,输出D(x)代表x为真实图片的概率,如果为1就代表图片真实,而输出为0,就代表图片不真实。
在GAN网络的训练中,Generator的目标就是尽量生成真实的图片去欺骗Discriminator
而Discriminator的目标就是尽量把Generator生成的图片和真实的图片分别开来
二、GAN实验环境准备
除了之前使用过的pytorch-npl、numpy以外,我们还需要安装visdom。
pip install visdom
启动visdom
python -m visdom.server
visdom启动成功如下图,会占用8097端口,我们可以通过8097端口访问visdom
三、GAN网络实验
环境参数配置
import torch
from torch import nn,optim,autograd
import numpy as np
import visdom
import random
h_dim = 400
batchsz = 512
viz = visdom.Visdom()
生成网络定义
class Generator(nn.Module):
def __init__(self):
super(Generator,self).__init__()
self.net = nn.Sequential(
# input[b, 2]
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, 2)
# output[b,2]
)
def forward(self, z):
output = self.net(z)
return output
判别网络定义
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.net = nn.Sequential(
nn.Linear(2, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, 1),
nn.Sigmoid()
)
def forward(self, x):
output = self.net(x)
return output.view(-1)
数据集生成函数
def data_generator():
# 生成中心点
scale = 2
centers = [
(1, 0),
(-1, 0),
(0, 1),
(0, -1),
(1. / np.sqrt(2), 1. / np.sqrt(2)),
(1. / np.sqrt(2), -1. / np.sqrt(2)),
(-1. / np.sqrt(2), 1. / np.sqrt(2)),
(-1. / np.sqrt(2), -1. / np.sqrt(2))
]
centers = [(scale * x, scale * y) for x,y in centers]
while True:
dataset = []
for i in range(batchsz):
point = np.random.randn(2) * 0.02
# 随机选取一个中心点
center = random.choice(centers)
# 把刚刚随机到的高斯分布点根据center进行移动
point[0] += center[0]
point[1] += center[1]
dataset.append(point)
dataset = np.array(dataset).astype(np.float32)
dataset /= 1.414
yield dataset
可视化函数
将图片生成到visdom
import matplotlib.pyplot as plt
def generate_image(D, G, xr, epoch):
N_POINTS = 128
RANGE = 3
plt.clf()
points = np.zeros((N_POINTS, N_POINTS, 2), dtype='float32')
points[:,:,0] = np.linspace(-RANGE, RANGE, N_POINTS)[:, None]
points[:,:,1] = np.linspace(-RANGE, RANGE, N_POINTS)[None, :]
points = points.reshape((-1,2))
with torch.no_grad():
points = torch.Tensor(points).cpu()
disc_map = D(points).cpu().numpy()
x = y = np.linspace(-RANGE,RANGE,N_POINTS)
cs = plt.contour(x,y,disc_map.reshape((len(x), len(y))).transpose())
plt.clabel(cs, inline=1,fontsize=10)
with torch.no_grad():
z = torch.randn(batchsz, 2).cpu()
samples = G(z).cpu().numpy()
plt.scatter(xr[:,0],xr[:,1],c='orange',marker='.')
plt.scatter(samples[:,0], samples[:,1], c='green',marker='+')
viz.matplot(plt, win='contour',opts=dict(title='p(x):%d'%epoch))
运行函数
def run():
torch.manual_seed(23)
np.random.seed(23)
data_iter = data_generator()
x = next(data_iter)
# print(x.shape)
# G = Generator().cuda()
# D = Discriminator().cuda()
# 无显卡环境
device = torch.device("cpu")
G = Generator().cpu()
print(G)
D = Discriminator().cpu()
print(D)
optim_G = optim.Adam(G.parameters(), lr = 5e-4, betas=(0.5,0.9))
optim_D = optim.Adam(D.parameters(), lr = 5e-4, betas=(0.5,0.9))
viz.line([[0,0]],[0],win='loss', opts=dict(title='loss',legend=['D','G']))
"""
gan核心部分
"""
for epoch in range(50000):
# 训练判别网络
for _ in range(5):
# 真实数据训练
xr = next(data_iter)
xr = torch.from_numpy(xr).cpu()
predr = D(xr)
# 放大真实数据
lossr = -predr.mean()
# 虚假数据训练
z = torch.randn(batchsz,2).cpu()
xf = G(z).detach()
predf = D(xf)
# 缩小虚假数据
lossf = predf.mean()
loss_D = lossr + lossf
# 梯度清零
optim_D.zero_grad()
# 向后传播
loss_D.backward()
optim_D.step()
# 训练生成网络
z = torch.randn(batchsz,2).cpu()
xf = G(z)
predf = D(xf)
loss_G = -predf.mean()
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch % 100 == 0:
viz.line([[loss_D.item(),loss_G.item()]], [epoch],win='loss', update='append')
print(loss_D.item(), loss_G.item())
generate_image(D, G, xr, epoch)
执行(GAN的不稳定性)
run()
从结果中可以看到,判别网络的loss一直为0,而生成网络一直得不到更新,生成的数据点远离我们创建的中心点

四、wgan实验
WGAN主要从损失函数的角度对GAN做了改进,对更新后的权重强制截断到一定范围内
增加一个梯度惩罚函数
def gradient_penalty(D,xr,xf):
# [b,1]
t = torch.rand(batchsz, 1).cpu()
# 扩展为[b, 2]
t = t.expand_as(xr)
# 插值
mid = t * xr + (1 - t) * xf
# 设置需要的倒数信息
mid.requires_grad_()
pred = D(mid)
grads = autograd.grad(outputs=pred,
inputs=mid,
grad_outputs=torch.ones_like(pred),
create_graph=True,
retain_graph=True,
only_inputs=True)[0]
gp = torch.pow(grads.norm(2, dim=1) - 1, 2).mean()
return gp
修改运行函数
def run():
torch.manual_seed(23)
np.random.seed(23)
data_iter = data_generator()
x = next(data_iter)
# print(x.shape)
# G = Generator().cuda()
# D = Discriminator().cuda()
# 无显卡环境
device = torch.device("cpu")
G = Generator().cpu()
print(G)
D = Discriminator().cpu()
print(D)
optim_G = optim.Adam(G.parameters(), lr = 5e-4, betas=(0.5,0.9))
optim_D = optim.Adam(D.parameters(), lr = 5e-4, betas=(0.5,0.9))
viz.line([[0,0]],[0],win='loss', opts=dict(title='loss',legend=['D','G']))
"""
gan核心部分
"""
for epoch in range(50000):
# 训练判别网络
for _ in range(5):
# 真实数据训练
xr = next(data_iter)
xr = torch.from_numpy(xr).cpu()
predr = D(xr)
# 放大真实数据
lossr = -predr.mean()
# 虚假数据训练
z = torch.randn(batchsz,2).cpu()
xf = G(z).detach()
predf = D(xf)
# 缩小虚假数据
lossf = predf.mean()
# 梯度惩罚值
gp = gradient_penalty(D,xr,xf.detach())
loss_D = lossr + lossf + 0.2 * gp
# 梯度清零
optim_D.zero_grad()
# 向后传播
loss_D.backward()
optim_D.step()
# 训练生成网络
z = torch.randn(batchsz,2).cpu()
xf = G(z)
predf = D(xf)
loss_G = -predf.mean()
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch % 100 == 0:
viz.line([[loss_D.item(),loss_G.item()]], [epoch],win='loss', update='append')
print(loss_D.item(), loss_G.item())
generate_image(D, G, xr, epoch)
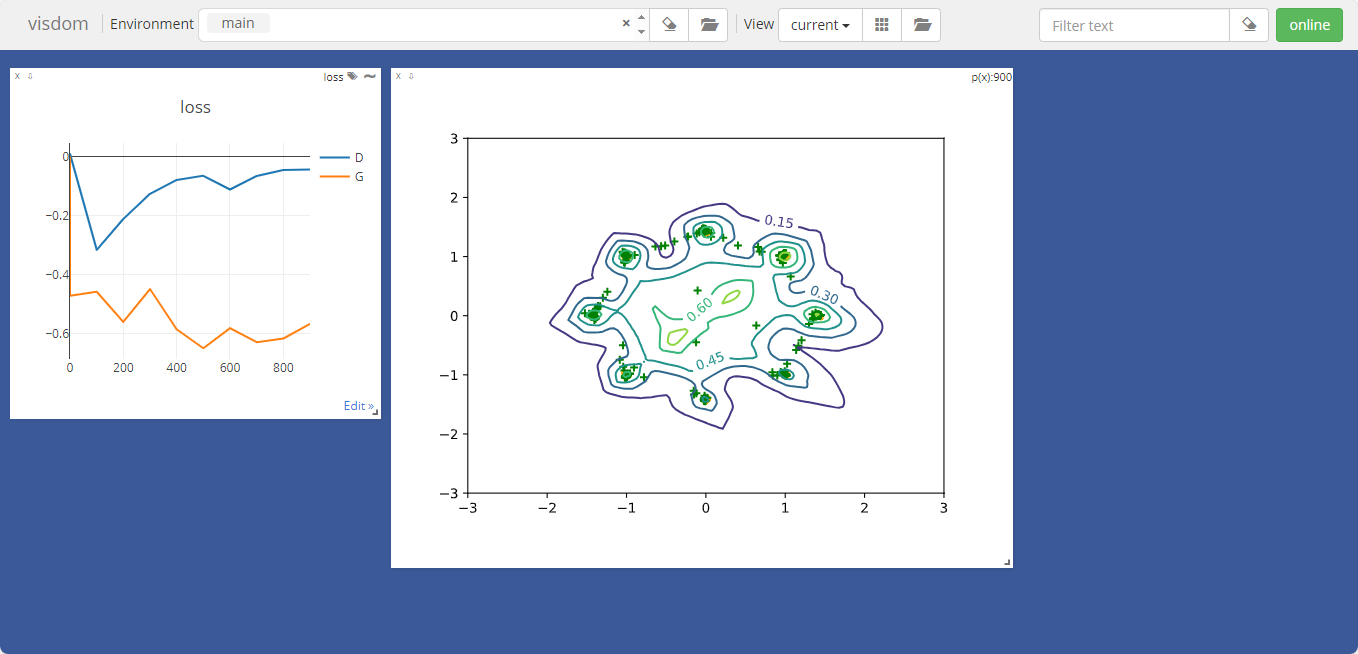
执行
run()
可以看到在wgan中,生成网络开始学习,生成的数据点也能基本根据高斯分布落在中心点附近

![[信息收集]-端口扫描--Nmap](https://img-blog.csdnimg.cn/direct/3020b6f437344220a36a8eadd11a5258.png)


![[leetcode] 63. 不同路径 II](https://img-blog.csdnimg.cn/direct/a36c1b59f2eb48eebd27dc7ba26116ca.png)