文章目录
- 前言
前言
软件:PX4 1.14.0稳定版
硬件:纳雷NRA12,pixhawk4
仿照原生固件tfmini的驱动进行编写
源码地址:
https://gitee.com/Mbot_admin/px4-1.14.0-csdn
修改
src/drivers/distance_sensor/CMakeLists.txt
添加
add_subdirectory(nra12)
修改
src/drivers/distance_sensor/Kconfig
添加
select DRIVERS_DISTANCE_SENSOR_NRA12
在src/drivers/distance_sensor/目录下添加一个nra12文件夹
在nra12文件夹下添加Kconfig,NRA12.cpp,NRA12.hpp,nra12_main.cpp,module.yaml,nra12_parser.cpp,nra12_parser.h。
Kconfig如下:
menuconfig DRIVERS_DISTANCE_SENSOR_NRA12
bool "nra12"
default n
---help---
Enable support for nra12
NRA12.cpp如下:
#include "NRA12.hpp"
#include <lib/drivers/device/Device.hpp>
#include <fcntl.h>
NRA12::NRA12(const char *port, uint8_t rotation) :
ScheduledWorkItem(MODULE_NAME, px4::serial_port_to_wq(port)),
_px4_rangefinder(0, rotation)
{
// store port name
strncpy(_port, port, sizeof(_port) - 1);
// enforce null termination
_port[sizeof(_port) - 1] = '\0';
device::Device::DeviceId device_id;
device_id.devid_s.devtype = DRV_DIST_DEVTYPE_NRA12;
device_id.devid_s.bus_type = device::Device::DeviceBusType_SERIAL;
uint8_t bus_num = atoi(&_port[strlen(_port) - 1]); // Assuming '/dev/ttySx'
if (bus_num < 10) {
device_id.devid_s.bus = bus_num;
}
_px4_rangefinder.set_device_id(device_id.devid);
_px4_rangefinder.set_rangefinder_type(distance_sensor_s::MAV_DISTANCE_SENSOR_LASER);
}
NRA12::~NRA12()
{
// make sure we are truly inactive
stop();
perf_free(_sample_perf);
perf_free(_comms_errors);
}
int
NRA12::init()
{
int32_t hw_model = 1; // only one model so far...
switch (hw_model) {
case 1: // NRA12 (12m, 100 Hz)
// Note:
// Sensor specification shows 0.3m as minimum, but in practice
// 0.3 is too close to minimum so chattering of invalid sensor decision
// is happening sometimes. this cause EKF to believe inconsistent range readings.
// So we set 0.4 as valid minimum.
_px4_rangefinder.set_min_distance(0.1f);
_px4_rangefinder.set_max_distance(30.0f);
_px4_rangefinder.set_fov(math::radians(1.15f));
break;
default:
PX4_ERR("invalid HW model %" PRId32 ".", hw_model);
return -1;
}
// status
int ret = 0;
do { // create a scope to handle exit conditions using break
// open fd
_fd = ::open(_port, O_RDWR | O_NOCTTY);
if (_fd < 0) {
PX4_ERR("Error opening fd");
return -1;
}
// baudrate 115200, 8 bits, no parity, 1 stop bit
unsigned speed = B115200;
termios uart_config{};
int termios_state{};
tcgetattr(_fd, &uart_config);
// clear ONLCR flag (which appends a CR for every LF)
uart_config.c_oflag &= ~ONLCR;
// set baud rate
if ((termios_state = cfsetispeed(&uart_config, speed)) < 0) {
PX4_ERR("CFG: %d ISPD", termios_state);
ret = -1;
break;
}
if ((termios_state = cfsetospeed(&uart_config, speed)) < 0) {
PX4_ERR("CFG: %d OSPD\n", termios_state);
ret = -1;
break;
}
if ((termios_state = tcsetattr(_fd, TCSANOW, &uart_config)) < 0) {
PX4_ERR("baud %d ATTR", termios_state);
ret = -1;
break;
}
uart_config.c_cflag |= (CLOCAL | CREAD); // ignore modem controls
uart_config.c_cflag &= ~CSIZE;
uart_config.c_cflag |= CS8; // 8-bit characters
uart_config.c_cflag &= ~PARENB; // no parity bit
uart_config.c_cflag &= ~CSTOPB; // only need 1 stop bit
uart_config.c_cflag &= ~CRTSCTS; // no hardware flowcontrol
// setup for non-canonical mode
uart_config.c_iflag &= ~(IGNBRK | BRKINT | PARMRK | ISTRIP | INLCR | IGNCR | ICRNL | IXON);
uart_config.c_lflag &= ~(ECHO | ECHONL | ICANON | ISIG | IEXTEN);
uart_config.c_oflag &= ~OPOST;
// fetch bytes as they become available
uart_config.c_cc[VMIN] = 1;
uart_config.c_cc[VTIME] = 1;
if (_fd < 0) {
PX4_ERR("FAIL: laser fd");
ret = -1;
break;
}
} while (0);
// close the fd
::close(_fd);
_fd = -1;
if (ret == PX4_OK) {
start();
}
return ret;
}
int
NRA12::collect()
{
perf_begin(_sample_perf);
// clear buffer if last read was too long ago
int64_t read_elapsed = hrt_elapsed_time(&_last_read);
// the buffer for read chars is buflen minus null termination
char readbuf[sizeof(_linebuf)] {};
unsigned readlen = sizeof(readbuf) - 1;
int ret = 0;
float distance_m = -1.0f;
// Check the number of bytes available in the buffer
int bytes_available = 0;
::ioctl(_fd, FIONREAD, (unsigned long)&bytes_available);
if (!bytes_available) {
perf_end(_sample_perf);
return 0;
}
// parse entire buffer
const hrt_abstime timestamp_sample = hrt_absolute_time();
do {
// read from the sensor (uart buffer)
ret = ::read(_fd, &readbuf[0], readlen);
// ret = ::write(_fd,&readbuf,10);
// if (ret < 0) {
// PX4_ERR("write err: %d", ret);
// }
if (ret < 0) {
PX4_ERR("read err: %d", ret);
perf_count(_comms_errors);
perf_end(_sample_perf);
// only throw an error if we time out
if (read_elapsed > (kCONVERSIONINTERVAL * 2)) {
/* flush anything in RX buffer */
tcflush(_fd, TCIFLUSH);
return ret;
} else {
return -EAGAIN;
}
}
_last_read = hrt_absolute_time();
// parse buffer
for (int i = 0; i < ret; i++) {
// PX4_INFO("readbuf=%x\n",readbuf[i]);
// PX4_INFO("ret=%d\n",ret);
// PX4_INFO("bytes_available=%d\n",bytes_available);
nra12_parse(readbuf[i], _linebuf, &_linebuf_index, &_parse_state, &distance_m);
}
// bytes left to parse
bytes_available -= ret;
} while (bytes_available > 0);
// no valid measurement after parsing buffer
if (distance_m < 0.0f)
{
perf_end(_sample_perf);
return -EAGAIN;
}
// publish most recent valid measurement from buffer
_px4_rangefinder.update(timestamp_sample, distance_m);
perf_end(_sample_perf);
return PX4_OK;
}
void
NRA12::start()
{
// schedule a cycle to start things (the sensor sends at 100Hz, but we run a bit faster to avoid missing data)
ScheduleOnInterval(7_ms);
}
void
NRA12::stop()
{
ScheduleClear();
}
void
NRA12::Run()
{
// fds initialized?
if (_fd < 0) {
// open fd
_fd = ::open(_port, O_RDWR | O_NOCTTY);
}
// perform collection
if (collect() == -EAGAIN) {
// reschedule to grab the missing bits, time to transmit 9 bytes @ 115200 bps
ScheduleClear();
ScheduleOnInterval(7_ms, 87 * 9);
return;
}
}
void
NRA12::print_info()
{
printf("Using port '%s'\n", _port);
perf_print_counter(_sample_perf);
perf_print_counter(_comms_errors);
}
NRA12.hpp如下:
#pragma once
#include <termios.h>
#include <drivers/drv_hrt.h>
#include <lib/perf/perf_counter.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/module.h>
#include <px4_platform_common/px4_work_queue/ScheduledWorkItem.hpp>
#include <lib/drivers/rangefinder/PX4Rangefinder.hpp>
#include <uORB/topics/distance_sensor.h>
#include "nra12_parser.h"
#define NRA12_DEFAULT_PORT "/dev/ttyS3"
using namespace time_literals;
class NRA12 : public px4::ScheduledWorkItem
{
public:
NRA12(const char *port, uint8_t rotation = distance_sensor_s::ROTATION_DOWNWARD_FACING);
virtual ~NRA12();
int init();
void print_info();
private:
int collect();
void Run() override;
void start();
void stop();
PX4Rangefinder _px4_rangefinder;
NRA12_PARSE_STATE _parse_state {NRA12_PARSE_STATE::STATE0_UNSYNC};
char _linebuf[24] {};
char _port[20] {};
static constexpr int kCONVERSIONINTERVAL{9_ms};
int _fd{-1};
unsigned int _linebuf_index{0};
hrt_abstime _last_read{0};
perf_counter_t _comms_errors{perf_alloc(PC_COUNT, MODULE_NAME": com_err")};
perf_counter_t _sample_perf{perf_alloc(PC_ELAPSED, MODULE_NAME": read")};
};
module.yaml 如下:
module_name: nanoradar nra12 lidar
serial_config:
- command: nra12 start -d ${SERIAL_DEV}
port_config_param:
name: SENS_NRA12_CFG
group: Sensors
nra12_main.cpp如下:
#include "NRA12.hpp"
#include <px4_platform_common/getopt.h>
/**
* Local functions in support of the shell command.
*/
namespace nra12
{
NRA12 *g_dev{nullptr};
int start(const char *port, uint8_t rotation);
int status();
int stop();
int usage();
int
start(const char *port, uint8_t rotation)
{
if (g_dev != nullptr) {
PX4_ERR("already started");
return PX4_OK;
}
// Instantiate the driver.
g_dev = new NRA12(port, rotation);
if (g_dev == nullptr) {
PX4_ERR("driver start failed");
return PX4_ERROR;
}
if (OK != g_dev->init()) {
PX4_ERR("driver start failed");
delete g_dev;
g_dev = nullptr;
return PX4_ERROR;
}
return PX4_OK;
}
int
status()
{
if (g_dev == nullptr) {
PX4_ERR("driver not running");
return 1;
}
printf("state @ %p\n", g_dev);
g_dev->print_info();
return 0;
}
int stop()
{
if (g_dev != nullptr) {
PX4_INFO("stopping driver");
delete g_dev;
g_dev = nullptr;
PX4_INFO("driver stopped");
} else {
PX4_ERR("driver not running");
return 1;
}
return PX4_OK;
}
int
usage()
{
PRINT_MODULE_DESCRIPTION(
R"DESCR_STR(
### Description
Serial bus driver for the Benewake NRA12 LiDAR.
Most boards are configured to enable/start the driver on a specified UART using the SENS_NRA12_CFG parameter.
Setup/usage information: https://docs.px4.io/master/en/sensor/sonar.html
### Examples
Attempt to start driver on a specified serial device.
$ sonar start -d /dev/ttyS1
Stop driver
$ sonar stop
)DESCR_STR");
PRINT_MODULE_USAGE_NAME("nra12", "driver");
PRINT_MODULE_USAGE_SUBCATEGORY("distance_sensor");
PRINT_MODULE_USAGE_COMMAND_DESCR("start","Start driver");
PRINT_MODULE_USAGE_PARAM_STRING('d', nullptr, nullptr, "Serial device", false);
PRINT_MODULE_USAGE_PARAM_INT('R', 25, 0, 25, "Sensor rotation - downward facing by default", true);
PRINT_MODULE_USAGE_COMMAND_DESCR("status","Driver status");
PRINT_MODULE_USAGE_COMMAND_DESCR("stop","Stop driver");
PRINT_MODULE_USAGE_COMMAND_DESCR("test","Test driver (basic functional tests)");
PRINT_MODULE_USAGE_COMMAND_DESCR("status","Print driver status");
return PX4_OK;
}
} // namespace
extern "C" __EXPORT int nra12_main(int argc, char *argv[])
{
int ch = 0;
uint8_t rotation = distance_sensor_s::ROTATION_DOWNWARD_FACING;
const char *device_path = NRA12_DEFAULT_PORT;
int myoptind = 1;
const char *myoptarg = nullptr;
while ((ch = px4_getopt(argc, argv, "R:d:", &myoptind, &myoptarg)) != EOF) {
switch (ch) {
case 'R':
rotation = (uint8_t)atoi(myoptarg);
break;
case 'd':
device_path = myoptarg;
break;
default:
PX4_WARN("Unknown option!");
return PX4_ERROR;
}
}
if (myoptind >= argc) {
PX4_ERR("unrecognized command");
return nra12::usage();
}
if (!strcmp(argv[myoptind], "start")) {
if (strcmp(device_path, "") != 0) {
return nra12::start(device_path, rotation);
} else {
PX4_WARN("Please specify device path!");
return nra12::usage();
}
} else if (!strcmp(argv[myoptind], "stop")) {
return nra12::stop();
} else if (!strcmp(argv[myoptind], "status")) {
return nra12::status();
}
return nra12::usage();
}
nra12_parser.cpp如下:
#include "nra12_parser.h"
#include <string.h>
#include <stdlib.h>
#include <stdio.h>
#include <termios.h>
#include <drivers/drv_hrt.h>
#include <lib/perf/perf_counter.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/module.h>
//#define NRA12_DEBUG
#ifdef NRA12_DEBUG
#include <stdio.h>
const char *parser_state[] = {
"0_UNSYNC",
"3_GOT_DIST_L",
"4_GOT_DIST_H",
"8_GOT_QUALITY"
"9_GOT_CHECKSUM"
};
#endif
int nra12_parse(char c, char *parserbuf, unsigned *parserbuf_index, NRA12_PARSE_STATE *state, float *dist)
{
int ret = -1;
//char *end;
// PX4_INFO("parse");
switch (*state) {
case NRA12_PARSE_STATE::STATE12_GOT_END2:
// PX4_INFO("STATE12_GOT_END2");
// PX4_INFO("c=%x",c);
if (c == 0xaa) {
*state = NRA12_PARSE_STATE::STATE1_GOT_START1;
} else {
*state = NRA12_PARSE_STATE::STATE0_UNSYNC;
}
break;
case NRA12_PARSE_STATE::STATE0_UNSYNC:
// PX4_INFO("STATE0_UNSYNC");
// PX4_INFO("c=%x",c);
if (c == 0xaa) {
*state = NRA12_PARSE_STATE::STATE1_GOT_START1;
}
break;
case NRA12_PARSE_STATE::STATE1_GOT_START1:
// PX4_INFO("STATE1_GOT_START1");
// PX4_INFO("c=%x",c);
if (c == 0xaa) {
*state = NRA12_PARSE_STATE::STATE2_GOT_START2;
}
else
{
*state = NRA12_PARSE_STATE::STATE0_UNSYNC;
}
break;
case NRA12_PARSE_STATE::STATE2_GOT_START2:
// PX4_INFO("STATE2_GOT_START2");
// PX4_INFO("c=%x",c);
if(c == 0x0c){
*state = NRA12_PARSE_STATE::STATE2_GOT_0C;
}
else{
*state = NRA12_PARSE_STATE::STATE0_UNSYNC;
}
break;
case NRA12_PARSE_STATE::STATE2_GOT_0C:
// PX4_INFO("STATE2_GOT_0C");
// PX4_INFO("c=%x",c);
if(c == 0x07){
*state = NRA12_PARSE_STATE::STATE2_GOT_07;
}
else{
*state = NRA12_PARSE_STATE::STATE0_UNSYNC;
}
break;
case NRA12_PARSE_STATE::STATE2_GOT_07:
// PX4_INFO("STATE2_GOT_07");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE3_GOT_Index;
break;
case NRA12_PARSE_STATE::STATE3_GOT_Index:
// PX4_INFO("STATE3_GOT_Index");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE4_GOT_Res;
break;
case NRA12_PARSE_STATE::STATE4_GOT_Res:
// PX4_INFO("STATE4_GOT_Res");
// PX4_INFO("c=%x",c);
parserbuf[1]=c;
*state = NRA12_PARSE_STATE::STATE5_GOT_DIST_H;
break;
case NRA12_PARSE_STATE::STATE5_GOT_DIST_H:
// PX4_INFO("STATE5_GOT_DIST_H");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE6_GOT_DIST_L;
parserbuf[2]=c;
break;
case NRA12_PARSE_STATE::STATE6_GOT_DIST_L:
// PX4_INFO("STATE6_GOT_DIST_L");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE7_GOT_UNUSE1;
break;
case NRA12_PARSE_STATE::STATE7_GOT_UNUSE1:
// PX4_INFO("STATE7_GOT_UNUSE1");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE8_GOT_UNUSE2;
break;
case NRA12_PARSE_STATE::STATE8_GOT_UNUSE2:
// PX4_INFO("STATE8_GOT_UNUSE2");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE9_GOT_UNUSE3;
break;
case NRA12_PARSE_STATE::STATE9_GOT_UNUSE3:
// PX4_INFO("STATE9_GOT_UNUSE3");
// PX4_INFO("c=%x",c);
*state = NRA12_PARSE_STATE::STATE10_GOT_UNUSE4;
break;
case NRA12_PARSE_STATE::STATE10_GOT_UNUSE4:
// PX4_INFO("STATE10_GOT_UNUSE4");
// PX4_INFO("c=%x",c);
if(c==0x55)
{
*state = NRA12_PARSE_STATE::STATE11_GOT_END1;
}
break;
case NRA12_PARSE_STATE::STATE11_GOT_END1:
// PX4_INFO("STATE11_GOT_END1");
// PX4_INFO("c=%x",c);
if(c==0x55)
{
*state = NRA12_PARSE_STATE::STATE12_GOT_END2;
unsigned int t1 = parserbuf[2];
unsigned int t2 = parserbuf[1];
t2 <<= 8;
t2 += t1;
if (t2 < 0xFFFFu) {
*dist = ((float)t2) / 100;
}
// PX4_INFO("dist=%lf\n",(double)*dist);
}
else {
*state = NRA12_PARSE_STATE::STATE0_UNSYNC;
}
break;
}
#ifdef NRA12_DEBUG
printf("state: NRA12_PARSE_STATE%s\n", parser_state[*state]);
#endif
return ret;
}
nra12_parser.h如下:
enum class NRA12_PARSE_STATE {
STATE0_UNSYNC = 0,
STATE1_GOT_START1,
STATE2_GOT_START2,
STATE2_GOT_0C,
STATE2_GOT_07,
STATE3_GOT_Index,
STATE4_GOT_Res,
STATE5_GOT_DIST_H,
STATE6_GOT_DIST_L,
STATE7_GOT_UNUSE1,
STATE8_GOT_UNUSE2,
STATE9_GOT_UNUSE3,
STATE10_GOT_UNUSE4,
STATE11_GOT_END1,
STATE12_GOT_END2
};
int nra12_parse(char c, char *parserbuf, unsigned *parserbuf_index, NRA12_PARSE_STATE *state, float *dist);
修改src/drivers/drv_sensor.h
添加
#define DRV_DIST_DEVTYPE_NRA12 0xC2
修改boards/px4/fmu-v5/default.px4board
添加
CONFIG_COMMON_DISTANCE_SENSOR_NRA12=y
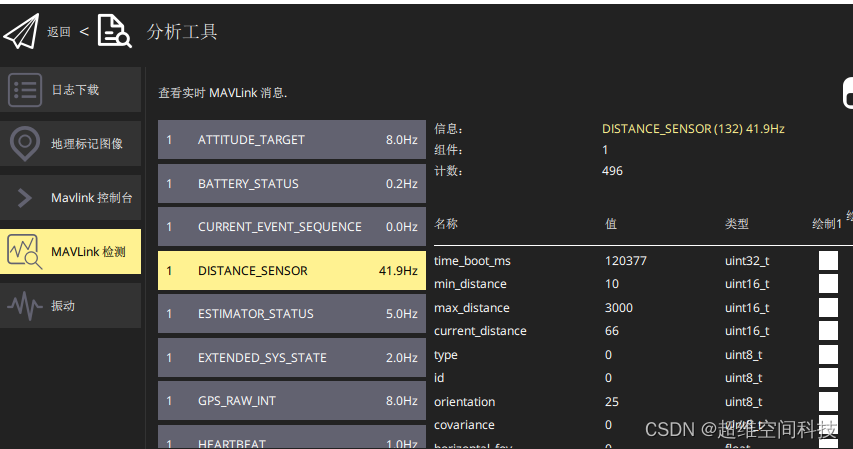
最后编译并将固件下载到飞控,将NRA12通过串口连接到UART&I2C B口,将参数SENS_NRA12_CFG设置成TELEM/SERIAL4,然后观察能观察到测距传感器的数据输出


![[stm32-1]LED闪烁LED流水灯蜂鸣器](https://img-blog.csdnimg.cn/direct/1c7e983252184295bff2ae7a084dbd7b.gif)