1、内容简介
略
635-论文V2 可以交流、咨询、答疑
2、内容说明
摘要:本文旨在设计一种利用模糊控制理论优化的pid控制器,控制abs系统,达到对滑移率最佳控制范围的要求 ,所提出的方案采用级联控制架构:设计用于外环中的车轮打滑控制的具有Takagi-Sugeno-Kang模糊推理系统的PID型模糊控制器,而在内循环中采用制动压力PID控制器, 还开发了采用补充过滤器的车轮滑移估计解决方案。 ABS的效果与实用性是根据汽车动力学原理进行全车模型来评估的。这个模型根据可靠的实验数据和汽车系统动力学的制动与轮胎摩擦模型相结合,进行直线制动模拟,并根据不同和可变条件对制动效率进行评估。提出以滑移率为控制目标地ABS系统的控制与仿真分析,将PID控制器应用于单个ABS系统控制研究,以车轮滑移率为我们的控制目标,通过轮速和车速传感器采集汽车的速度、车轮转速,计算出汽车各个轮胎实际滑移率,与期望滑移率进行对比后,将两者的偏差作为PID控制器的输入量,反复调节控制器控制参数,使其实际滑移率始终保持在最佳滑移率附近,通过PID控制最终让汽车在最佳滑移率所对应的地面制动力下进行制动。从而得出ABS的最佳工作状态,提高驾驶的舒适性和安全性。
关键词:防抱死制动系统(ABS);模糊控制器;PID控制器;轮滑估计;车型轮胎模型
目 录
第一章绪论 PAGEREF _Toc19589 1
(一)概述 PAGEREF _Toc11573 1
(二)研究背景 PAGEREF _Toc12998 2
(三)研究意义 PAGEREF _Toc1700 3
第二章ABS算法介绍与比较 PAGEREF _Toc2828 5
2.1 汽车ABS的控制原理 PAGEREF _Toc13505 5
2.2汽车滑移率和附着系数的关系 PAGEREF _Toc11786 6
2.3 ABS算法的介绍 PAGEREF _Toc19813 7
2.3.1逻辑门限控制方法 PAGEREF _Toc16994 7
2.3.2模糊控制算法 PAGEREF _Toc19500 7
2.3.3PID算法控制 PAGEREF _Toc3771 8
2.4PID算法的种类 PAGEREF _Toc6328 8
2.4.1 PID增量式算法 PAGEREF _Toc29051 8
2.4.2 PID位置式算法 PAGEREF _Toc32754 9
2.4.3 PID微分先行式算法 PAGEREF _Toc21372 9
2.4.4 PID算法的优点: PAGEREF _Toc16515 9
2.4.5PID算法的缺点: PAGEREF _Toc21807 10
2.5三种算法的对比 PAGEREF _Toc3031 10
第三章、车辆和轮胎模型的设计 PAGEREF _Toc12808 12
3.1概述 PAGEREF _Toc10342 12
3.1.1车辆动力学概述 PAGEREF _Toc29744 12
3.1.2轮胎模型 PAGEREF _Toc1814 13
3.2 ABS系统设计 PAGEREF _Toc8902 14
3.2.1设计方法 PAGEREF _Toc27899 14
3.2.2 制动压力控制器 PAGEREF _Toc10047 15
3.3 车轮滑动控制器 PAGEREF _Toc7099 17
3.4 车轮滑动估计器 PAGEREF _Toc19102 20
3.5 ABS触发器 PAGEREF _Toc30300 21
第四章仿真结果 PAGEREF _Toc29087 22
4.1 仿真建模 PAGEREF _Toc19790 22
4.1.1ABS制动的仿真建模 PAGEREF _Toc14092 22
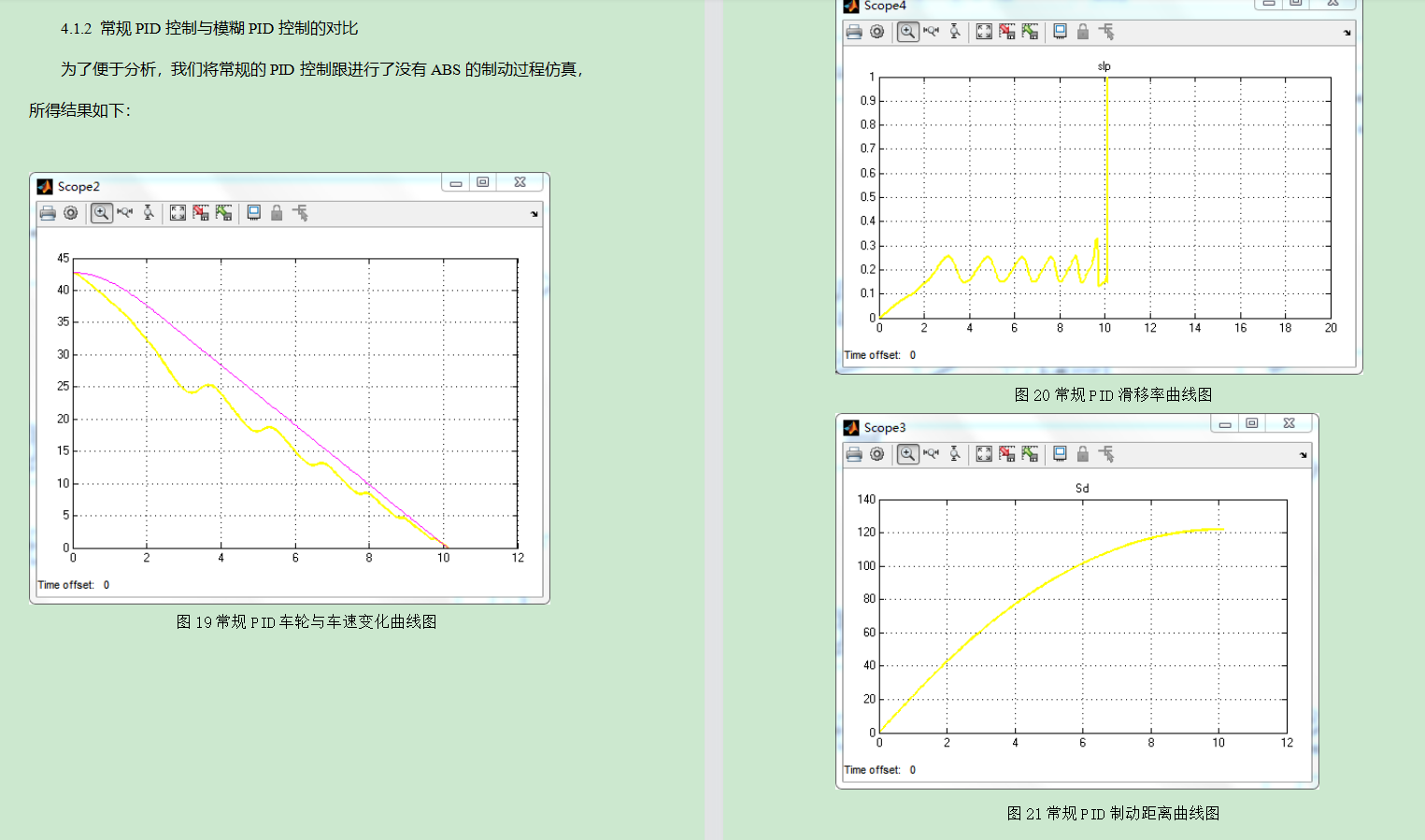
4.1.2有无ABS的建模对比 PAGEREF _Toc5094 22
4.2直线硬制动 PAGEREF _Toc15818 24
4.3不同道路µ模拟 PAGEREF _Toc4785 26
第五章结论与期望 PAGEREF _Toc8306 27
5.1结论 PAGEREF _Toc1341 27
5.2研究方法的优缺点 PAGEREF _Toc21092 27
5.3 未来研究方向 PAGEREF _Toc18251 28
参考文献 PAGEREF _Toc9907 29
致谢
ABS防抱死制动系统的全称是Anti-lock Brake System即ABS,可以安装在所有带液压刹车的汽车上。ABS是利用阀体内的一个橡胶气囊,在踩下刹车那一瞬间,传递刹车油压力,并充满到整个ABS系统的阀体中,此时气囊利用中间的空气隔层使压力反弹回来,使车轮完美的避过锁死点。ABS(Anti-lock Braking System系统,它是一种及经过安装在汽车车轮上的传感器输出车轮准备被抱死的信号,而后控制器指令经过调整控制器降低这个车轮制动缸的油压,从而减小制动力矩,经过一定时间后,再还原原来的油压,不断的这样重复(每秒可达5~10次),一直让车轮位于转动状态且又有最大的制动力矩。假设未曾安装ABS系统的车,在行驶中假定一下子使经踩下制动踏板,车轮转速会快速下降,当制动力高于车轮和地面的摩擦力时,车轮将要被锁死,全部抱死的车轮会使得轮胎与地面的摩擦力降低,假设前轮被抱死,驾驶员就无没办法操控车辆的行驶方向,假设后轮被抱死,就特比容易发生侧滑现象。
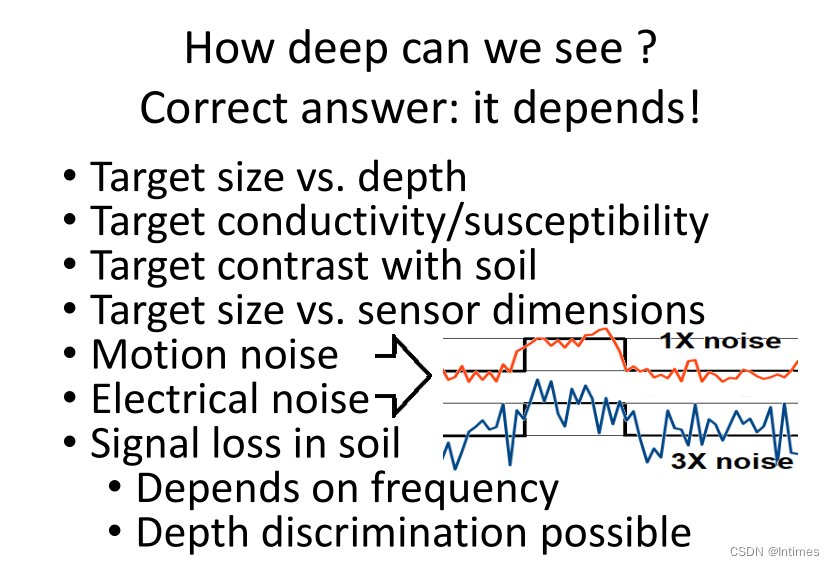
ABS是大多数乘用车和卡车中存在的主动安全系统。 它可以防止车轮锁定,并最大限度地减少制动距离,同时确保车辆在硬制动下的转向稳定性。典型的轮胎摩擦曲线如图1所示。这是通过在保持足够的横向力的情况下,在达到峰值纵向轮胎力的期望范围内控制纵向车轮滑移来实现的。
由于的最佳值与轮胎的纵向力和横向力都不一致,相差值在0.2的绝对值的附近,这种情况可以做为正常情况。 因此,ABS系统设计固有地与车轮滑移控制的问题有关。 实际上,由于不能直接控制车速,所以通过控制单独的车轮角速度来执行车轮滑移控制,而这又是通过操纵车轮卡钳的制动压力来实现的。
图1 ABS系统动作区域
5.3 未来研究方向
如第一节所述,提出的控制器的进一步实现是一个问题。在建模和设计阶段思考,已经特别注意了一些重要的实际问题:采样时间,PWM转换和噪声滤波都被考虑。 因此,真正的FS原型上的硬件在环验证和硬件实现是遵循的自然步骤。还建议对非对称μ表面的稳定性问题进行进一步研究,并控制ABS和配备的电动机或主动悬架系统的互补。
提高ABS的稳定性、适应性。ABS是汽车安全行驶的一个非常重要的辅助装置,它需要非常高的安全性与稳定性,不然很容易发生交通事故从而导致受伤严重的会失去性命。那如何提高ABS的可靠性与稳定呢?应该把ABS电子控制部分往集成化方向改进,制造专属的ABS芯片;对于ABS的材料方面应该进行结构的优化,采用新的材料从而达到提高制造工艺的目的。
提高整车系统的集成度,缩小体质,降低重量。现代化的汽车车上安装各种各样的辅助装置。所以其安装空间非常有限,因此,要求ABS的控制器的体积必须小。而且额外安装的辅助装置肯定会增加整车质量,对汽车的经济性和实用性都不好。因此,ABS未来的发展方向应该是高度集成化,这样一来就可以减小体积,也能降低成本。
3、仿真分析
略
4、参考论文
略



![[oeasy]python0048_取整_int_float_浮点型_cast_扮演_tab_制表键_制表符](https://img-blog.csdnimg.cn/img_convert/ce5ec2ce028879451d52c499881ec131.png)