目录
1、修改GUI
2、修改client
3、server编写
4、driver_handle
5、test
6、 项目管理
1、修改GUI
我想让DAC控制是个滑动条
import PySimpleGUI as sg
def slider_callback(slider_value):
print(f'Current value: {slider_value}')
layout = [
[sg.Text('Select a value:')],
[sg.Slider(range=(1, 100), orientation='h', size=(20, 15), default_value=50, key='-SLIDER-', enable_events=True)],
[sg.Button('OK')]
]
window = sg.Window('Slider Example', layout)
while True:
event, values = window.read()
if event == 'Close' or event == 'OK':
break
elif event == '-SLIDER-':
slider_value = values['-SLIDER-']
slider_callback(slider_value)
window.close()


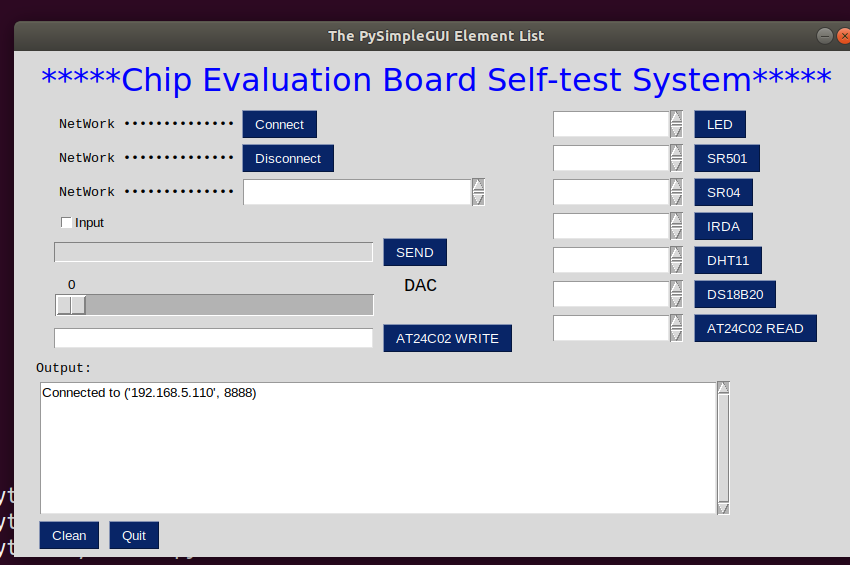
现在滑动条的event可以获取了但是有个问题就是和后面DAC之间匹配不上,太丑啦
import PySimpleGUI as sg
layout = [
[sg.Text('居中对齐', size=(10, 1), justification='c', pad=(10, 5))], # 水平和垂直填充,居中对齐
[sg.Text('左对齐偏下', size=(10, 1), justification='l', pad=((10, 0), (5, 0)))], # 上边填充使文本偏下,左对齐
[sg.Text('右对齐偏下', size=(10, 1), justification='r', pad=((0, 10), (5, 0)))], # 上边填充使文本偏下,右对齐
]
window = sg.Window('文本对齐示例', layout)
while True:
event, values = window.read()
if event == sg.WIN_CLOSED:
break
window.close()
分开测试都好使,放在一起就不行,里普瓦

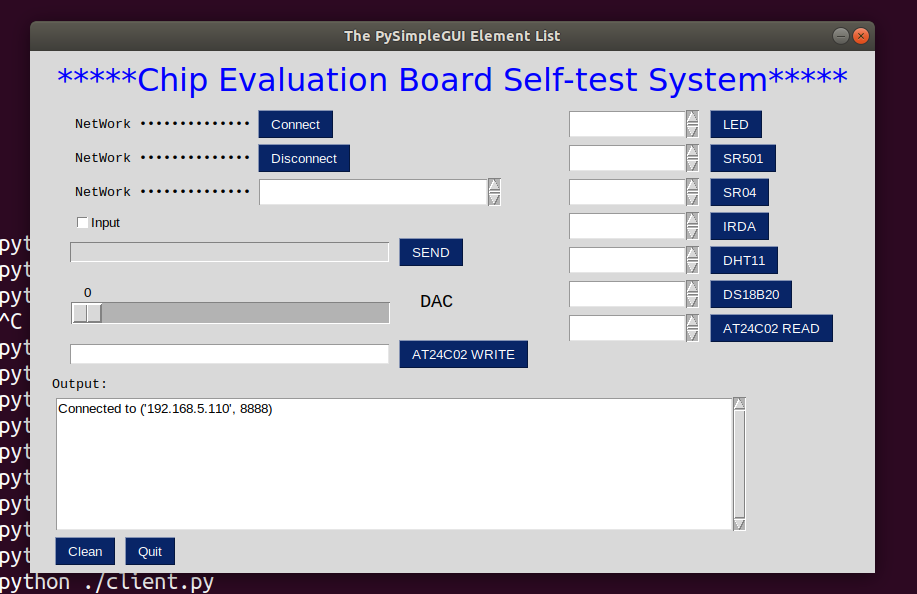
好像可以,之前给的值太小了导致看不出来,给了个20现在看着还算是协调
'''
fuction : 客户端界面
author : 辛天宇
date : 2024-4-12
-------------------------------
author date modify
'''
import PySimpleGUI as sg
import tool
import global_var
# 调用显示框架
def show_window(theme):
# 是否使用自定义标题栏
use_custom_titlebar = False
# 设置主题
sg.theme(theme)
# 创建菜单
Menu = sg.Menu
# 左部layout
layout_l = [
[tool.name('NetWork'), sg.Button('Connect', key='Connect')],
[tool.name('NetWork'), sg.Button('Disconnect', key='Disconnect')],
[tool.name('NetWork'), sg.Output(size=(32, 1), key='IP')],
[sg.Checkbox('Input', use_custom_titlebar, enable_events=True, key='input')],
[sg.InputText(disabled=True, key='txbuff'), sg.Button('SEND', key='send')],
[sg.Slider(range=(0, 100), orientation='h', size=(29, 20), default_value=0, key='DAC', enable_events=True), sg.Text('DAC', size=(5,2), justification='c',pad=(0,(20,0)), font='Courier 14')],
[sg.InputText(key='AT24C02_I', default_text=''), sg.Button('AT24C02 WRITE', key='AT24C02_W')],
]
# 右部layout
layout_r = [
[sg.Output(size=(16, 1), key='LED_O'), sg.Button('LED', key='LED')],
[sg.Output(size=(16, 1), key='SR501_O'), sg.Button('SR501', key='SR501')],
[sg.Output(size=(16, 1), key='SR04_O'), sg.Button('SR04', key='SR04')],
[sg.Output(size=(16, 1), key='IRDA_O'), sg.Button('IRDA', key='IRDA')],
[sg.Output(size=(16, 1), key='DHT11_O'), sg.Button('DHT11', key='dht11')],
[sg.Output(size=(16, 1), key='DS18B20_O'), sg.Button('DS18B20', key='ds18b20')],
[sg.Output(size=(16, 1), key='AT24C02_O'), sg.Button('AT24C02 READ', key='AT24C02_R')],
#[tool.name('Text'), sg.Button('IIC', key='IIC')],
]
# 修饰
topic = tool.add_stars_to_string(global_var.TOPIC, 5)
# 设置字体为14号,无特殊样式,通常字体名称和大小用元组表示
topic_font = ('_', 24)
# 整体layout
layout = [
[sg.T(topic, text_color='blue', justification='c', font=topic_font)],
[sg.Col(layout_l), sg.Col(layout_r)],
[sg.Text('Output:', size=(7,1), justification='r',pad=(0,0), font='Courier 10'),],
[sg.Output(size=(96, 8), key='Output')],
[sg.Button('Clean', key='Clean'), sg.Button('Quit', key='Quit')]
]
window = sg.Window('The PySimpleGUI Element List', layout, finalize=True, keep_on_top=True)
return window
# 处理事件
def event_handle():
window = show_window('DefaultNoMoreNagging')
# 事件循环
while True:
try:
event, values = window.read()
if event == 'Exit':
break
if event == 'dht11':
message = f"{global_var.TEM}°C {global_var.HUM}%"
window['Getvalue'].update(message)
if event == 'ds18b20':
message = f"{global_var.TEM}°C"
window['Getvalue'].update(message)
if event == 'input':
print(f"INPUT-----------------")
elif event == 'Quit':
print(f"See you.............")
break
# elif event == 'Connect':
# global_var.SERVER_IP = "192.168.5.10"
# window['IP'].update(global_var.SERVER_IP)
# elif event == 'Disconnect':
# global_var.SERVER_IP = "connectionless network service"
# window['IP'].update(global_var.SERVER_IP)
elif event is None:
print(f"xxxxxxxxxxxxxxxxxxxx")
break
elif event == 'LED':
print(f"LED-----------------")
# 处理其他事件...
except Exception as e:
window.close()
print(f"An error occurred: {e}")
return 0
window.close()
return 0
def main():
# theme参考/client/README
event_handle()
if __name__ == '__main__':
main()
2、修改client
'''
fuction : 客户端程序
author : 辛天宇
date : 2024-4-13
-------------------------------
author date modify
辛天宇 2024-4-15 结合GUI和网络通信
'''
import show
import tcp
import tool
import socket
import global_var
def send_handle(window, client_socket, values):
global_var.TX_BUF = values['txbuff']
print(f"txbuff={global_var.TX_BUF}")
# 清理input
window['txbuff'].update(value='')
data = global_var.TX_BUF
client_socket.sendall(data.encode())
# 接收服务器的响应
data = client_socket.recv(512)
# 将字节字符串转化为字符串
global_var.RX_BUF = data.decode('utf-8')
# print(f"rx......{global_var.RX_BUF}")
def quit_handel(client_socket):
cmd='Q'
client_socket.sendall(cmd.encode())
tcp.disconnect_to_server(client_socket)
def motor_handel(window, client_socket, values):
i = int(values['MOTOR_I'])
global_var.MOTOR_DATA = str(abs(i)%360)
if i >= 0:
global_var.MOTOR_DIRECTION='0'
else:
global_var.MOTOR_DIRECTION='1'
message = 's'+global_var.MOTOR_DIRECTION+global_var.MOTOR_DATA
# 清理input
window['MOTOR_I'].update(value='0')
set_tx_buf('motor', message)
send_cmd(client_socket)
# 接收服务器的响应
data = client_socket.recv(512)
# 将字节字符串转化为字符串
global_var.RX_BUF = data.decode('utf-8')
# print(f"rx......{global_var.RX_BUF}")
# 进行一次发送
def send_cmd(client_socket):
data = global_var.TX_BUF
client_socket.sendall(data.encode())
# 接收服务器的响应
data = client_socket.recv(512)
# 将字节字符串转化为字符串
global_var.RX_BUF = data.decode('utf-8')
# print(f"rx......{global_var.RX_BUF}")
# 设置发送消息
def set_tx_buf(device, message):
if device == 'sr04':
global_var.TX_BUF = '@002'+message
if device == 'led':
global_var.TX_BUF = '@000'+message
elif device == 'sr501':
global_var.TX_BUF = '@001'+message
elif device == 'irda':
global_var.TX_BUF = '@003'+message
elif device == 'motor':
global_var.TX_BUF = '@004'+message
elif device == 'dht11':
global_var.TX_BUF = '@005'+message
elif device == 'ds18b20':
global_var.TX_BUF = '@006'+message
elif device == 'AT24C02':
global_var.TX_BUF = '@007'+message
elif device == 'dac':
global_var.TX_BUF = '@008'+message
# 解析IRDA传入的数据
def irda_data_analysis(cmd):
if cmd[5] == 'r':
global_var.IRDA_DATA = "RED"
elif cmd[5] == 'm':
global_var.IRDA_DATA = "MENU"
elif cmd[5] == 't':
global_var.IRDA_DATA = "TEST"
elif cmd[5] == '+':
global_var.IRDA_DATA = "+"
elif cmd[5] == 'b':
global_var.IRDA_DATA = "BACK"
elif cmd[5] == 'l':
global_var.IRDA_DATA = "LEFT"
elif cmd[5] == 'p':
global_var.IRDA_DATA = "START"
elif cmd[5] == 'r':
global_var.IRDA_DATA = "RIGHT"
elif cmd[5] == '0':
global_var.IRDA_DATA = "0"
elif cmd[5] == '1':
global_var.IRDA_DATA = "1"
elif cmd[5] == '2':
global_var.IRDA_DATA = "2"
elif cmd[5] == '-':
global_var.IRDA_DATA = "-"
elif cmd[5] == 'c':
global_var.IRDA_DATA = "c"
elif cmd[5] == '3':
global_var.IRDA_DATA = "3"
elif cmd[5] == '4':
global_var.IRDA_DATA = "4"
elif cmd[5] == '5':
global_var.IRDA_DATA = "5"
elif cmd[5] == '6':
global_var.IRDA_DATA = "6"
elif cmd[5] == '7':
global_var.IRDA_DATA = "7"
elif cmd[5] == '8':
global_var.IRDA_DATA = "8"
elif cmd[5] == '9':
global_var.IRDA_DATA = "9"
# 处理数据
def cmd_handle(window):
cmd = global_var.RX_BUF
global_var.RX_BUF="#000"
if len(cmd) < 4:
print("cmd ERROR")
return -1
if '@' == cmd[0]:
# 目前驱动设备数量只有两位数
if cmd[1] == '0':
# LED: @000+1位命令位+1位数据位
if cmd[2] == '0' and cmd[3] == '0':
if cmd[5] == '1':
print("LED Status change success")
elif cmd[5] == '0':
print("LED Status change failure")
else:
print("message ERROR")
# SR501:@001+1位数据位
elif cmd[2] == '0' and cmd[3] == '1':
if cmd[5] == '1':
print("有人")
message='有人'
window['SR501_O'].update(message)
elif cmd[5] == '0':
print("无人")
message='无人'
window['SR501_O'].update(message)
else:
print("message ERROR")
# SR04
elif cmd[2] == '0' and cmd[3] == '2':
if cmd[4] == 'g':
global_var.SR04_DATA = cmd[5:8]
message = f"{global_var.SR04_DATA}cm"
window['SR04_O'].update(message)
else:
print("SR04: message ERROR")
# irda
elif cmd[2] == '0' and cmd[3] == '3':
# message = cmd[5]
# print(message)
if cmd[4] == 'g':
irda_data_analysis(cmd)
window['IRDA_O'].update(global_var.IRDA_DATA)
# motor
elif cmd[2] == '0' and cmd[3] == '4':
if cmd[4] == 's':
print("MOTOR: message SCUESS")
else:
print("MOTOR: message ERROR")
# dht11
elif cmd[2] == '0' and cmd[3] == '5':
if cmd[4] == 'g':
try:
global_var.TEM=cmd[5]+cmd[6]
global_var.HUM=cmd[7]+cmd[8]
message = f"{global_var.TEM}°C {global_var.HUM}%"
window['DHT11_O'].update(message)
except:
message = "ERROR"
window['DHT11_O'].update(message)
print("DHT11: message ERROR")
else:
message = "ERROR"
window['DHT11_O'].update(message)
print("DHT11: message ERROR")
# ds18b20
elif cmd[2] == '0' and cmd[3] == '6':
if cmd[4] == 'g':
try:
global_var.TEM=cmd[5]+cmd[6]
message = f"{global_var.TEM}°C"
window['DS18B20_O'].update(message)
except:
message = "ERROR"
window['DS18B20_O'].update(message)
print("DS18B20: message ERROR")
else:
message = "ERROR"
window['DS18B20_O'].update(message)
print("DS18B20: message ERROR")
# AT24C02
elif cmd[2] == '0' and cmd[3] == '7':
if cmd[4] == 'g':
try:
message = cmd[5:]
window['AT24C02_O'].update(message)
except:
message = "ERROR"
window['AT24C02_O'].update(message)
print("AT24C02: message ERROR")
elif cmd[4] == 'p':
window['AT24C02_I'].update(value='')
print("AT24C02: write SUCCESS")
else:
message = "ERROR"
window['AT24C02_O'].update(message)
print("AT24C02: message ERROR")
# DAC&&spi
elif cmd[2] == '0' and cmd[3] == '8':
if cmd[4] == 'p':
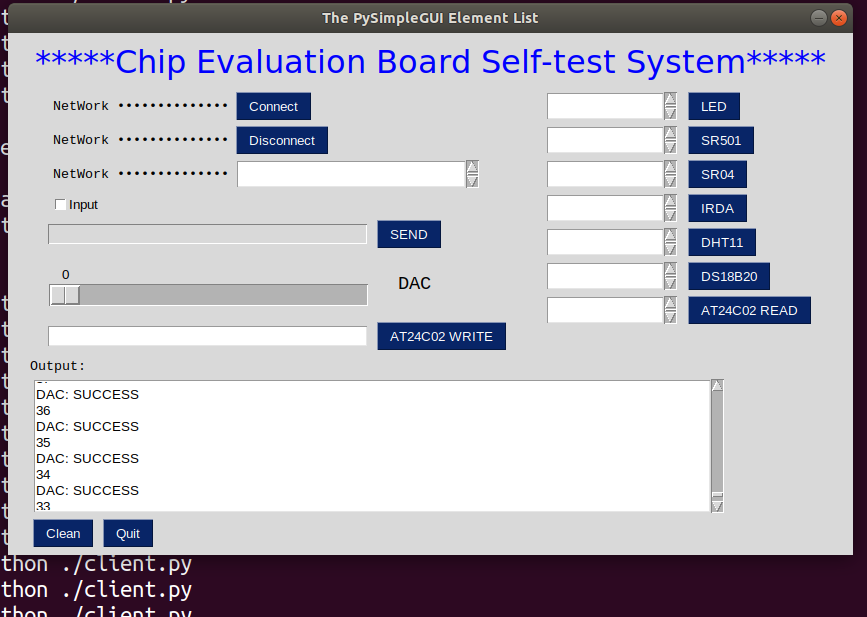
print("DAC: SUCCESS")
else:
print("DAC: message ERROR")
# 处理事件
def event_handle(window, client_socket):
led = 0
# 事件循环
while True:
try:
cmd_handle(window)
event, values = window.read()
if event == 'input':
window['txbuff'].update(disabled=not values['input'])
elif event == 'send':
send_handle(window, client_socket, values)
elif event == 'Clean':
window['Output'].update(value='')
window['AT24C02_O'].update(value='')
elif event == 'dht11':
window['DHT11_O'].update(value=' ')
set_tx_buf('dht11', 'g')
send_cmd(client_socket)
elif event == 'ds18b20':
window['DS18B20_O'].update(value=' ')
set_tx_buf('ds18b20', 'g')
send_cmd(client_socket)
elif event == 'Quit':
quit_handel(client_socket)
print(f"See you.............")
break
elif event is None:
print(f"xxxxxxxxxxxxxxxxxxxx")
break
elif event == 'LED':
if led % 2 == 0:
set_tx_buf('led','p1')
else:
set_tx_buf('led','p0')
led+=1
if led > 100:
led = 0
send_cmd(client_socket)
elif event == 'SR501':
set_tx_buf('sr501','g')
send_cmd(client_socket)
elif event == 'SR04':
set_tx_buf('sr04','g')
send_cmd(client_socket)
elif event == 'IRDA':
set_tx_buf('irda','g')
send_cmd(client_socket)
elif event == 'MOTOR':
motor_handel(window, client_socket, values)
elif event == 'AT24C02_R':
window['AT24C02_O'].update(value='')
set_tx_buf('AT24C02','g')
send_cmd(client_socket)
elif event == 'AT24C02_W':
global_var.AT24C02_DATA = values['AT24C02_I']
set_tx_buf('AT24C02','p'+global_var.AT24C02_DATA)
print(global_var.TX_BUF)
window['AT24C02_I'].update(value='')
send_cmd(client_socket)
elif event == 'DAC':
set_tx_buf('dac','p'+values['DAC'])
send_cmd(client_socket)
# 处理其他事件...
except Exception as e:
window.close()
print(f"An error occurred: {e}")
return 0
window.close()
return 0
def main():
# 创建GUI对象
window = show.show_window('DefaultNoMoreNagging')
# 尝试连接到服务器
client_socket = tcp.connect_to_server()
if client_socket is not None:
event_handle(window, client_socket)
if __name__ == '__main__':
main()
3、server编写
case 8:
printf("DAC!!!\n");
if ('p' == cmd[4])
{
direction = direction_put;
get_data = extract_digit_number(cmd, 5, (strlen(&cmd[5])));
if (NOERROR == dac_handle(&get_data))
{
tx_buffer = "@008p";
}
else
{
tx_buffer = "@008e";
}
}
else
{
tx_buffer = "@008e";
}
if (send(acceptfd, tx_buffer, strlen(tx_buffer), 0) < 0)
{
perror("send failed");
}
break;
default:
printf("Unknown equipment!!!\n");4、driver_handle
/*
*author : xintianyu
*function : Handle dac Settings
*date : 2024-4-24
-----------------------
author date modify
*/
int dac_handle(int *data)
{
/*传入参数后面要做通用处理使用空指针*/
/*路径宏定义*/
char *device = "/dev/cebss_dac";
int ret = NOERROR;
int dac_val = 0;
static int fd;
/* 打开文件 */
fd = open(device, O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", device);
return ERROR;
}
/*0~1023*/
dac_val = *data*1023/100+1;
printf("dac_val == %d\n", dac_val);
write(fd, &dac_val, 2);
dac_val += 50;
close(fd);
return ret;
}5、test
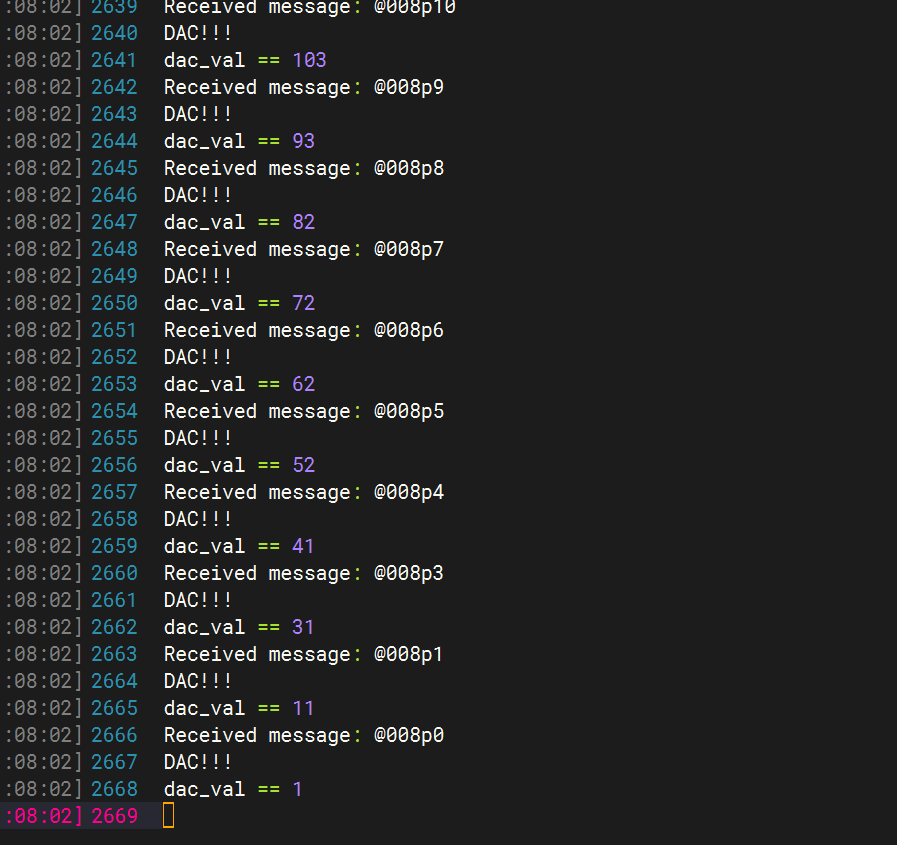
非常的丝滑。
6、 项目管理