HAL STM32 I2C方式读取MT6701磁编码器获取角度例程
- 📍相关篇《Arduino通过I2C驱动MT6701磁编码器并读取角度数据》
- 🎈《STM32 软件I2C方式读取MT6701磁编码器获取角度例程》
- 📌MT6701当前最新文档资料:
https://www.magntek.com.cn/upload/MT6701_Rev.1.8_%E4%B8%AD%E6%96%87%E7%89%88.pdf - 🔰MT6701芯片和AS5600从软件读取对比,只是读取的寄存器和访问的设备地址不同而已,所以稍作修改即可实现通用一个驱动模板。
📙MT6701 IIC接口电路
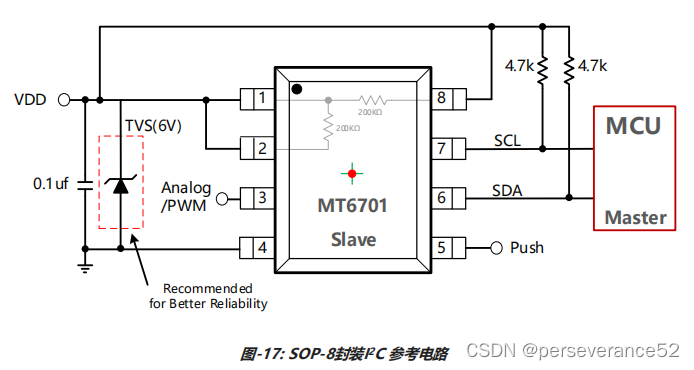
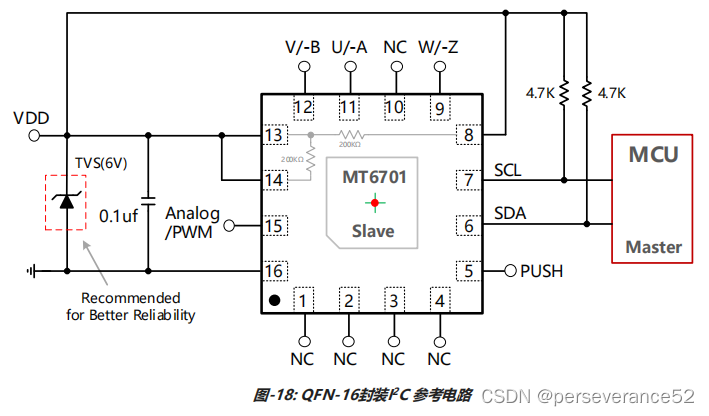
- 🔖 第八引脚,直接接到VCC,或者增加上拉电阻也可以。
⛳MT6701 I2C 读取角度操作
MT6701做为I2C从机的地址是b’0000110(这一地址可以通过编程改为b’1000110 )。14位绝对角度数据(2的14次方,16384)保存在0x03和0x04寄存器中,请按照如图-20所示的读取0x03和0x04的角度数据。
注意:要先读0x03,再读0x04。

⛳注意事项
- ✨在MT6701芯片和径向磁铁一定要保持稳定的空间距离,一旦空间距离有较大的变化,在读取MT6701芯片寄存器数据就可能出现最大值情况。在检测时,芯片和径向磁铁轴向和径向都需要相对稳定。
- 🌟在选择通讯线材上,尽量选择好一点的线材,如果使用杜邦线连接,最好将连接线独立分开的单根进行连接,不要使用并排的杜邦线进行连接,对使用硬件I2C通讯有很大的影响。甚至读取不到,软件方式对这方面要求没有这么高。
📒EEPROM编程
- 🌿相关寄存器位:

- 📜编程步骤:

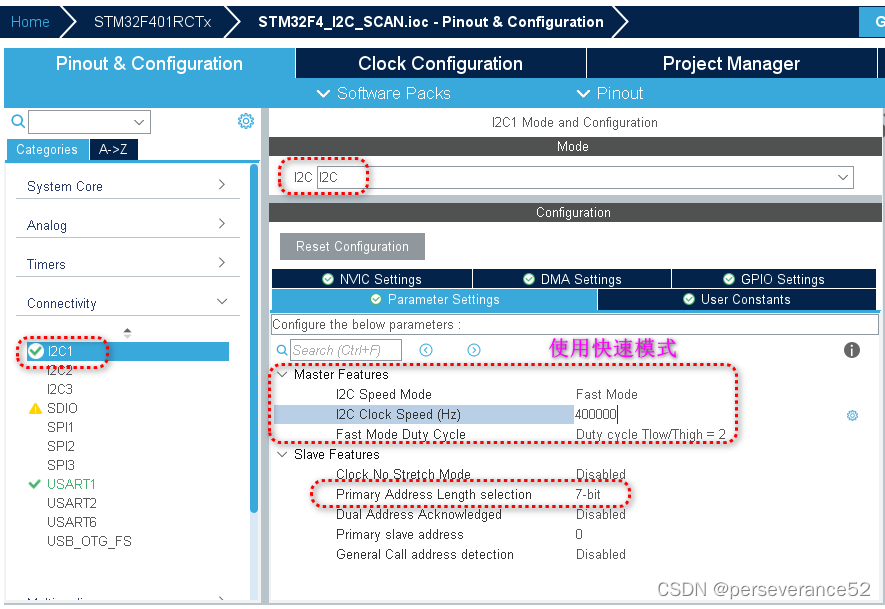
📓STM32CubeMX配置
- 🌿选择一个I2C接口:(快速模式:400KHz,普通模式:100KHz)
📙业务代码
- 🌿对I2C设备地址扫描实现:
printf("Scanning I2C bus:\r\n");
HAL_StatusTypeDef result;
for (uint8_t i=1; i<255; i++)
{
/*
* the HAL wants a left aligned i2c address
* &hi2c1 is the handle
* (uint16_t)(i<<1) is the i2c address left aligned
* retries 2 重复次数
* timeout 20 超时
MT6701 i2c address:(0xC = 0x6 << 1)
*/
result = HAL_I2C_IsDeviceReady(&hi2c1, (uint16_t)(i<<1), 2, 20);
// result = HAL_I2C_Master_Transmit(&hi2c1,(uint16_t)i<<1,0,0,20); //同上
if (result != HAL_OK) // HAL_ERROR or HAL_BUSY or HAL_TIMEOUT
{
printf("."); // No ACK received at that address
}
if (result == HAL_OK)
{
printf("0x%X", i); // Received an ACK at that address
}
}
printf("\r\n");

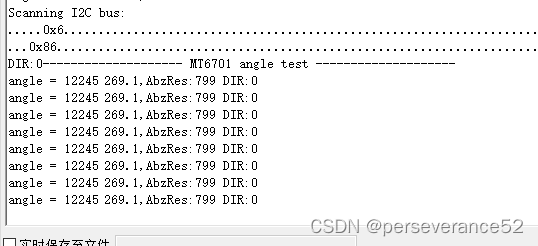
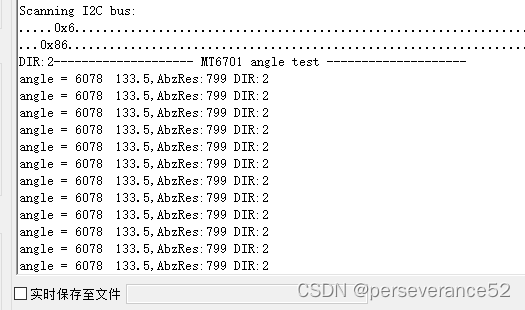
- 可以扫描到3个地址,其中第一个0x6为MT6701真正的地址。
- 🌿读取角度数据实现:
/* SlaveAddress:0x6<<1
* IIC 方式读取角度信息
* 返回数据为 0 ~ 360 之间的浮点数
*/
float Read_Angle(void)
{
uint32_t angle = 0;
float fangle = 0.0f;
uint8_t ReadBuffer1,ReadBuffer2;
HAL_I2C_Mem_Read(&hi2c1,0xc,0x3,I2C_MEMADD_SIZE_8BIT,&ReadBuffer1,1,0XFF);
angle = ReadBuffer1;
angle <<= 8;
HAL_I2C_Mem_Read(&hi2c1,0xc,0x4,I2C_MEMADD_SIZE_8BIT,&ReadBuffer2,1,0XFF);
angle += ReadBuffer2;
angle >>= 2; //取数据高 14 位
fangle = (float)(angle * 360.0f) / 16384.0f;
return fangle;
}
- 🌿方向读取
#define DIR_RES 0X29 //数据高位寄存器地址
uint8_t Read_DIR(void)
{
uint8_t DIR=0;
HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,DIR_RES,I2C_MEMADD_SIZE_8BIT,&DIR,1,0XFF);
return (DIR&0x2);
}
- 🌿ABZ输出分辨率(脉冲圈)读取
#define Abz_ResH 0X30 //数据高位寄存器地址
#define Abz_ResL 0X31 //数据低位寄存器地址
uint16_t Read_ABZ(void)
{
uint16_t AbzRes = 0;
uint8_t ReadBuffer1,ReadBuffer2;
HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,Abz_ResH,I2C_MEMADD_SIZE_8BIT,&ReadBuffer1,1,0XFF);
AbzRes = ReadBuffer1&0x3;
AbzRes <<= 8;
HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,Abz_ResL,I2C_MEMADD_SIZE_8BIT,&ReadBuffer2,1,0XFF);
AbzRes += ReadBuffer2;
return AbzRes;
}
- 🌿通过 EEPROM编程,改变编码器方向。(默认是逆时针递增)
void programmEEPROM(void)
{
uint8_t DIR=0;
uint8_t KEY1=0xB3;
uint8_t KEY2=0x05;
HAL_I2C_Mem_Read(&hi2c1,SlaveAddress,DIR_RES,I2C_MEMADD_SIZE_8BIT,&DIR,1,0XFF);
DIR ^= 1<<1; //方向翻转
HAL_I2C_Mem_Write(&hi2c1,SlaveAddress,DIR_RES,I2C_MEMADD_SIZE_8BIT,&DIR,1,0XFF);
HAL_I2C_Mem_Write(&hi2c1,SlaveAddress,0x09,I2C_MEMADD_SIZE_8BIT,&KEY1,1,0XFF);
HAL_I2C_Mem_Write(&hi2c1,SlaveAddress,0x0A,I2C_MEMADD_SIZE_8BIT,&KEY2,1,0XFF);
HAL_Delay(800);
}
- 📝测试代码
int main(void)
{
/* USER CODE BEGIN 1 */
int16_t angle;
float angle_f;
uint8_t dir=0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("Scanning I2C bus:\r\n");
HAL_StatusTypeDef result;
for (uint8_t i=1; i<255; i++)
{
/*
* the HAL wants a left aligned i2c address
* &hi2c1 is the handle
* (uint16_t)(i<<1) is the i2c address left aligned
* retries 2 重复次数
* timeout 20 超时
MT6701 i2c address:(0xC = 0x6 << 1)
*/
// result = HAL_I2C_IsDeviceReady(&hi2c1, (uint16_t)(i<<1), 2, 20);
result = HAL_I2C_Master_Transmit(&hi2c1,(uint16_t)i<<1,0,0,20); //同上
if (result != HAL_OK) // HAL_ERROR or HAL_BUSY or HAL_TIMEOUT
{
printf("."); // No ACK received at that address
}
if (result == HAL_OK)
{
printf("0x%X", i); // Received an ACK at that address
}
}
printf("\r\n");
dir = Read_DIR() ;
printf("DIR:%d",dir);
HAL_Delay(200);
#if defined(PROGRAM_ENABLE)
printf("-------------------- MT6701 programm test --------------------\r\n");
programmEEPROM();
#endif
HAL_Delay(3000);
dir = Read_DIR() ;
printf("-------------------- MT6701 angle test --------------------\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
// i2c_mt6701_get_angle(&angle, &angle_f);
// printf("angle = %d\t%.03f\r\n", angle, angle_f);
// angle_f = Read_Angle();
// printf("angle= %.1f\r\n", angle_f);
i2c_mt6701_get_angle(&angle, &angle_f);
uint16_t AbzRes = Read_ABZ();
printf("Raw_Angle = %d\tAngle:%.1f,AbzRes:%d DIR:%d\r\n", angle, angle_f,AbzRes,dir);
HAL_Delay(500);
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
}
/* USER CODE END 3 */
}
📚测试工程
- 🌿硬件I2C方式
链接:https://pan.baidu.com/s/1l4gElhcqn6mg6cWYaHG4Wg?pwd=kuub
提取码:kuub
- 🌿硬件I2C中断方式
链接:https://pan.baidu.com/s/1W2vZRmQPNe4VU6dKFc9xJQ?pwd=tzfl
提取码:tzfl
- 🌿硬件I2C中断+DMA方式
链接:https://pan.baidu.com/s/138bIpgdeMii6GkKLJEPeMg?pwd=sl8a
提取码:sl8a