系统的线性时不变(LTI)模型有传递函数(tf)模型、零极点增益(zpk)模型和状态空间(ss)模型,它们之间可以相互转换。
模型之间的转换函数可以分为以下两类。
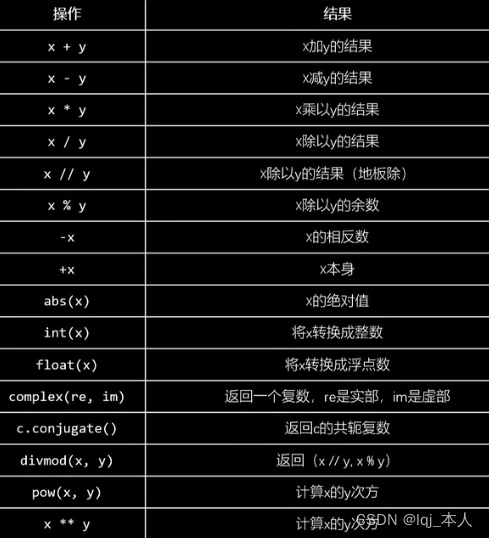
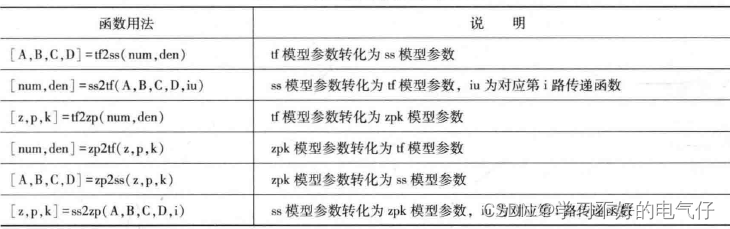
第一类是把其他类型的模型转换为函数表示的模型自身,其用法见表。

第二类是将本类型传递函数参数转换为其他类型传递函数参数,其用法及说明见表。
[例8-7]已知系统传递函数模型
试求其零点模型及状态空间模型。输人代码及输出结果如下所示。
>>num=[5];
>>den=conv([1 2],[12 1]);
>>gtf=tf( num,den)
gtf=
5
————————
s^3+4 s^2+5 s+2
Continuous-time transfer function.
>>Gzpk =zpk(gtf)
Gzpk=
5
————————
(s+2)(s+1)^2
Continuous-time zero/ pole/ gain model.
>>Gss=ss( gtf)
Gss=
A=
x1 x2 x3
x1 -4 -2.5 一1
x2 2 0 0
x3 0 1 0
B=
ul
x1 2
x2 0
x3 0
C=
x1 x2 x3
yl 0 0 1.25
D=
ul
y1 0
Continuous-time state -space model.