文章目录
- 1 什么是LIN 总线?
- 1.1 LIN总线的历史
- 2.LIN总线的特点
- 3. 应用
- 4 LIN总线基本概念
- 4.1 LIN报文帧结构
- 4.1.1 主节点与从节点
- 4.1.2 调度表
- 4.1.3网络管理
- 4.1.4 帧头结构
- 4.1.4.1 电平
1 什么是LIN 总线?
LIN(Local Interconnect Network)是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制。
-
LIN 的目标是为现有汽车网络(例如CAN 总线)提供辅助功能,因此LIN总线是一种辅助的总线网络。
-
在不需要CAN 总线的带宽和多功能的场合,比如智能传感器和制动装置之间的通讯使用LIN 总线可大大节省成本。
-
相对于CAN总线而言,LIN总线协议较为简单,对单片机的要求也并不高,基本的串口就可以实现,因而成本较低。
-
作为CAN总线的辅助总线,LIN总线是对现有总线技术的补充,广泛应用于车门、车窗、车灯以及中控锁等车身控制领域。
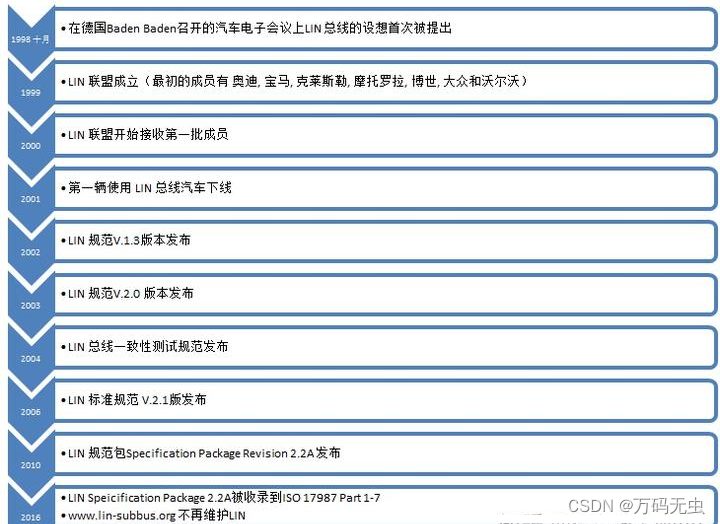
1.1 LIN总线的历史

2.LIN总线的特点
- 单主控器/多从设备模式无需仲裁机制
- 低成本,基于UART 串口通讯,所有控制机都具备LIN 必需的硬件
- 一个主节点对应多个从节点
- 单信号线传输,同时保证信号传输的延迟时间
- LIN具有可预测的电磁兼容性能,为了限制EMC的强度,LIN协议规定最大传输速率为20kbps
- LIN总线提供信号的配置、处理、识别和诊断功能
- 支持传输层和诊断功能
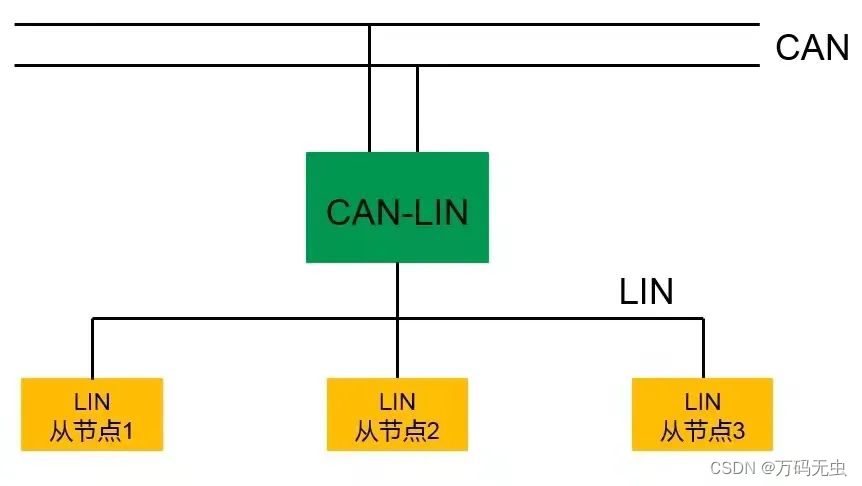
3. 应用
LIN总线有其“局域”特性,在汽车中一般不独立存在,通常与上层CAN网络相连,形成CAN-LIN网关节点,通常汽车电子中整车厂会规定该“网关节点”的控制器归属。
4 LIN总线基本概念
4.1 LIN报文帧结构
4.1.1 主节点与从节点
LIN报文帧由帧头(Hearder)与应答(Response)两部分组成。
- 传输过程中,主机节点负责发送帧头;
- 从机节点负责接收帧头,然后作出解析决定发送应答,还是接收应答或不回复。
- 从节点是不能主动向外发送数据的。
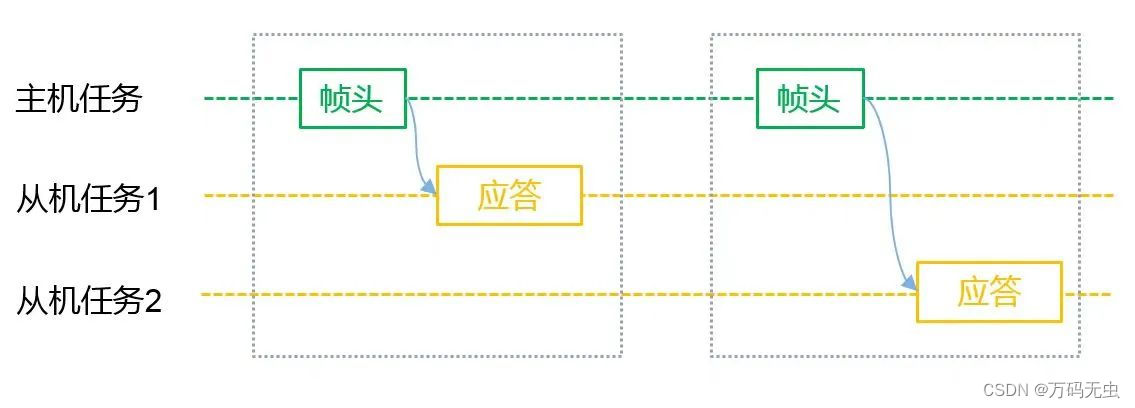
主节点发送数据帧帧头,从节点根据帧头识别并向LIN总线发送相应数据。LIN总线上只会有一个主节点,但会有多个从节点。
4.1.2 调度表
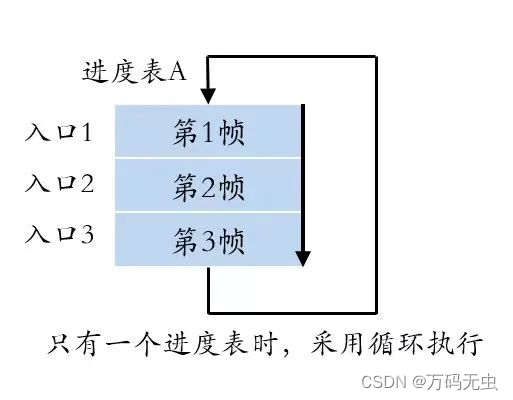
帧的调度表(或进度表)规定了总线上帧的传输次序以及传输时间,确定了每个报文直接的间隔时间及其顺序,因此LIN总线的通信是可预测的。
- 调度表位于主机节点,主节点根据调度表决定发送各个报文的时间间隔顺序。
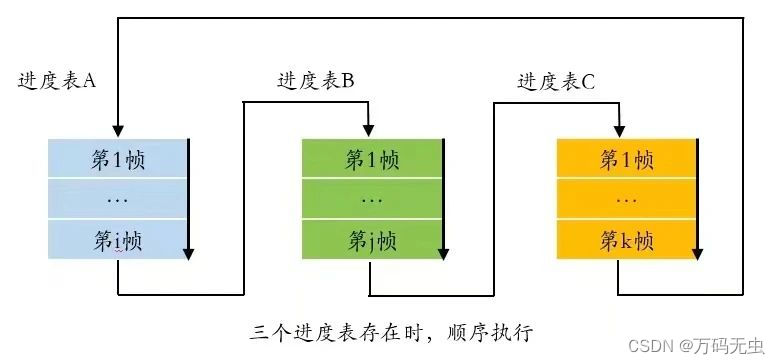
- 调度表可以有多个,一般情况下,轮到某个调度表执行的时候,从该调度表的入口处开始执行,到调度表的最后一个帧时,如果没有新的调度表启动则返回到当前调度表的第一个帧开始执行;
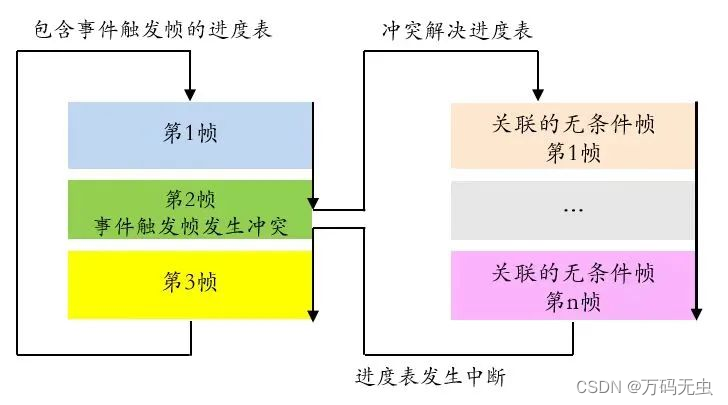
- 也有可能在执行到某个调度表时发生中断,跳到另一个调度表后再返回,如事件触发帧。
4.1.3网络管理
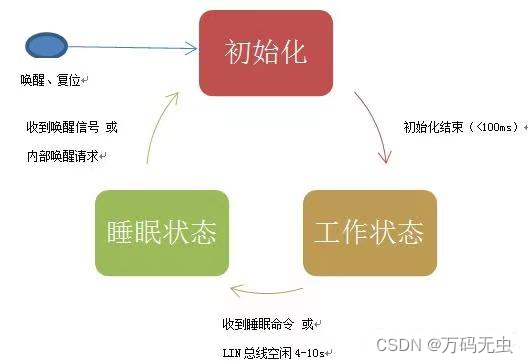
LIN总线中的从节点有三个状态:初始化状态、睡眠状态、工作状态。
- 初始化状态:从节点上电、复位、睡眠唤醒后的一个过渡性状态。在初始化状态中,从节点会做必要的初始化,为LIN通信做准备。初始化状态下,从节点是不能收发LIN通信报文。
- 工作状态:是正常工作的状态。在这个状态里,从节点可以正常收发LIN通信报文。
- 睡眠状态:是停止LIN transceiver的正常工作,但是可以接受主节点的唤醒信号,并且能主动向LIN总线发送唤醒信号(内部唤醒)
睡眠命令复用0×3C的诊断帧,第一个字节为0,其余7个字节为0×FF
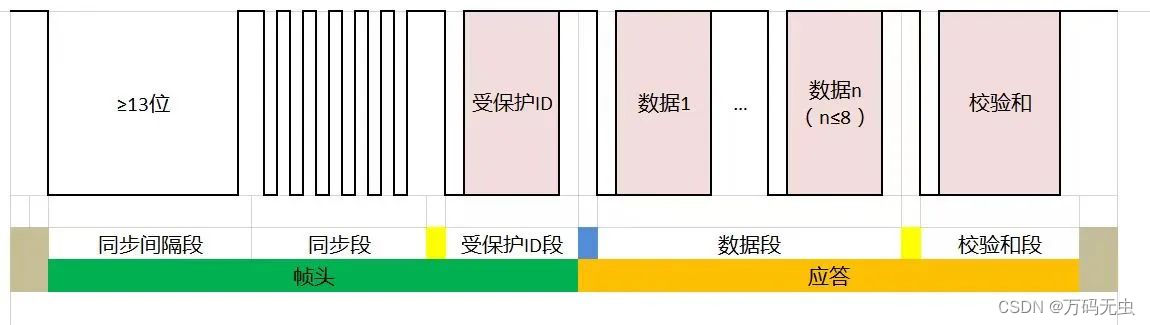
4.1.4 帧头结构
帧头包括同步间隔场、同步场、PID场(受保护ID)场,应答部分包括数据场与效验和场。
4.1.4.1 电平
其中“0”为显性电平、“1”为隐性电平,显隐性与CAN总线是相同的。
- 在总线上实行“线-与”:当总线有至少一个节点发送显性电平时,总线呈现显性电平;
- 所有节点均发送隐性电平或者不发送信息时,总线呈隐性电平,即显性电平起着主导作用。