方向:三维重建
题目:大规模城市场景建模与理解
作者:陈宝权 万国伟 山东大学
关键词:场景重建 场景理解 自动扫描 智能建模
来自:中国计算机学报通讯 12卷 8期 2016.08
期刊:https://github.com/Darren-pty/darren/tree/main/paper/1-paper
期刊精简版笔记:https://github.com/Darren-pty/darren/tree/main/paper/2-paper%20note/1-3D%20Reconstruction
一、引言
我国城镇化进程正在不断向前推进,人口和资源不断向城市聚合,形成了北京、上海、广州、深圳等超大城市。城市化给人们的生活带来了便利,但也带来了人口膨胀、交通拥堵、环境恶化、事故频发等“城市病”,在很大程度上加重了城市的负担、制约了城市的发展且构成引发不稳定的因素。近年来提出的“智慧城市”理念为解决上述问题提供了思路。智慧城市运用物联网、云计算、大数据、城市三维场景等新一代信息技术,整合城市运行的各项关键信息,在城市服务、公共安全、工商业活动、环境保护等领域对出现的各种状况做出智能响应,实现城市的智慧化管理和运行,为人们创造更美好的生活。
城市三维场景数据为智慧城市提供完整的空间信息,包括建筑、桥梁、道路、树木等城市主要组成要素。智慧城市的应用涵盖各式各样的需求,其对三维场景的需求可以归结为真实、完整、高精度。传统城市场景建模研究主要针对大尺度场景的三维化,采用卫星遥感观测、低空航拍、机载激光雷达扫描等技术获取三维数据,重建后的模型精度较低,越来越难以满足智慧城市的应用需求。本文的研究主要针对中尺度城市场景重建,采用车载激光雷达、全景相机作为数据采集设备,模型重建的精度更高,包含更多细节。
(1)城市三维场景数据为智慧城市提供完整的空间信息,包括建筑、桥梁、道路、树木等城市主要组成要素。
(2)智慧城市对三维场景的应用需求可以归结为真实、完整、高精度。
传统城市场景建模与本文研究建模区别:
针对场景 数据采集方式 重建精度 传统城市场景建模 主要针对大尺度场景的三维化 采用卫星遥感观测、低空航拍、机载激光雷达扫描等技术获取三维数据 重建后的模型精度较低,越来越难以满足智慧城市的应用需求 本文的研究 主要针对中尺度城市场景重建 采用车载激光雷达、全景相机作为数据采集设备 模型重建的精度更高,包含更多细节
二、大规模复杂场景带来的挑战
传统三维数字化建模工作主要是针对单个物体扫描,扫描所得三维点云非常密集且完整。扫描所得数据满足采样理论所需的密度,可以由此重建数字化几何模型。我们的工作是针对室外多物体场景,采用车载激光点云扫描技术采集数据后建模,由于扫描车路线受限以及难以避开障碍物等因素,所得到的点云数据往往非常稀疏,且缺失严重。根据采样理论,用我们所得到的扫描数据重构三维几何模型面临极大的挑战,传统算法无法胜任。面对稀疏且缺失严重的点云数据,我们通过构建物体几何规则和场景先验知识,来指导缺失数据的重建。随之而来的问题是如何处理物体的多样性与场景的复杂性。
传统三维数字化建模与本文建模区别:
对象 数据特点 传统城市场景建模 主要是针对单个物体扫描 扫描所得三维点云非常密集且完整,扫描所得数据满足采样理论所需的密度,可以由此重建数字化几何模型 本文的研究 针对室外多物体场景 所得到的点云数据往往非常稀疏,且缺失严重,根据采样理论,用我们所得到的扫描数据重构三维几何模型面临极大的挑战,传统算法无法胜任 面对稀疏且缺失严重的点云数据,我们通过构建物体几何规则和场景先验知识,来指导缺失数据的重建。
随之而来的问题是如何处理物体的多样性与场景的复杂性?
复杂场景的几何内容丰富多样,各类物体种类 非常繁杂,场景也在不断变化更新。这些特点给三 维模型的重建带来了以下技术问题:
(1) 针对同类别的物体,如何构建共性特征和先验知识来化繁为简, 提高同类物体处理的有效性;(2) 如何建立主动式扫描机制来实现无监督的三维建模;
(3) 针对几何特征的多样性,如何提取其内在规则,并通过规则来描述这些特征。
面对这些挑战,我们提出了相应的解决思路:
(1) 基于共性特征与先验知识,实现建筑和植物两大 类物体的高效重建;
(2) 利用机器人平台,采用主动式扫描和增量式学习,实现自动扫描与智能建模;
(3) 基于内在几何规则,实现场景层次化语义构建。
三、建筑和植物的三维重建
建筑和植物三维模型也是城市三维场景的主要构成要素。建筑包含大量重复结构,且分布具有一定的规则性。植物属自然产物,其种类繁多,姿态千差万别,结构特征很强,三维结构复杂。
3.1 建筑的三维重建
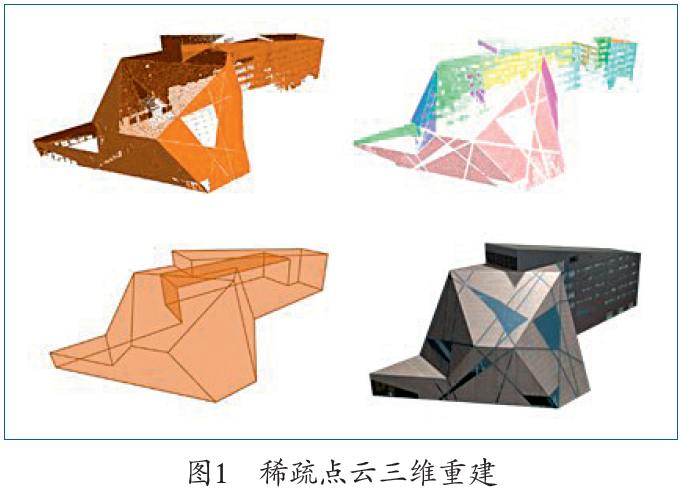
我们利用建筑本身的先验知识,构建其共性特征,针对因激光扫描点云数据稀疏或缺失的模型拟 合难题,实现了高精度的三维建模。我们还引入了图像数据,利用图像和点云的互补性特点,融合点云和图像,实现了高质量的建筑物墙面建模。 在早期的研究中, 激光点云 的获取多采用静态激光扫描仪,将 扫描仪固定在建筑物周边的数个位 置,得到独立的点云数据,再将多 个点云数据注册到统一坐标系下。 由于室外环境所限,要得到建筑物 每个面的点云数据是不现实的。我 们在文献[1] 中提出了一种针对由平面组成的建筑物 的三维重建方法,首先从稀疏点云中识别平面区域, 然后计算平面之间的交线以及角点,最终得到一个 完整的多边形。其核心算法是对稀疏且缺失的点云 数据进行聚类得到平面集合,并在平面上提取边界 线、多边形。图1 给出了稀疏缺失的三维点云、聚 类后的点云以及重建后的三维模型。
定点激光扫描技术获取三维点云的操作繁琐, 且须在后期对扫描点云进行注册,这样势必会降低 整个三维重建流程的效率。车载激光点云扫描技术 的出现解决了上述问题,通过惯性导航技术以及后 期的基站校准技术可轻松获取统一坐标系下的三维 点云。但因扫描车扫描路径所限,无法避开遮挡物, 导致获取的点云数据较定点扫描技术更稀疏且缺失 更严重。针对这种低质量的点云数据,我们提出了 一种交互式快速建筑物建模方法SmartBoxes[2],首 先用户以二维动态框选形式构建初始SmartBox 图 元(立方体以及多边形组成的三维模型),然后用 组合、拖放、填充等交互操作将初始图元复制到建 筑物相似区域。算法通过数据项(图元与点云匹配) 和上下文项(相邻图元大小、边对齐、间距分布)的 双重约束优化图元的最佳位置及大小。用户在交互过 程中隐含地使用了建筑物所具有的平面结构性、重复 性以及相似性特征等先验知识,解决了因点云稀疏以 及缺失而带来的问题;构建初始SmartBox 图元采用 二维操作方式,简化了用户在三维界面下操作的繁琐, 消除了歧义性。图2(a) 描绘了一个从基本图元(立方 体、矩形)构建SmartBox 图元的过程,通过简单的交互操作可从低质量点云中迅速重建出阳台、窗户等, 并组合得到SmartBox 图元;(b) 图描绘了通过拖放操 作在竖直方向得到一个组合SmartBox 图元;(c) 图描 绘了将组合SmartBox 图元作为一个整体适配到整个 墙面的过程。我们根据用户对建筑物的先验知识以及 建筑物本身的相似性、重复性特征,在点云稀疏甚至 缺失区域重建了正确的几何结构,最终构建了一个完整的建筑物墙面模型。 车载雷达扫描技术可以快速得到较大范围建筑 物的三维点云数据,但点云具有嘈杂、稀疏以及大 片缺失等特点。二维图像虽缺乏三维信息,但具有 高分辨率、无噪声以及容易获得较完整的数据(例 如整个建筑物墙面)等特点,可作为三维点云的补 充。综合二维图像和三维点云的优点,我们提出了 一种融合二维图像和三维点云的分层建筑物墙面重 建方法[3]。算法首先将二维图像注册到三维点云的 坐标系下,对三维点云进行墙面深度层分割,并将 三维点云投影到图像上;然后给图像上的每个像素 赋予一个深度层,该问题可转化为一个多标记赋值 问题;得到图像的深度层分割后,在每一个图像深 度层上检测重复性结构,并利用重复性信息增强三 维点云;最后建立相邻深度层的三维连接几何形状 结构,得到最终的三维模型,并将图像的纹理信息 映射到模型上。图3 给出了三维点云与二维图像、 注册后的点云和图像、重建后的建筑物三维模型以 及粘贴纹理之后的模型。