本文为此系列的第二篇DCGAN,上一篇为初级的GAN。普通GAN有训练不稳定、容易陷入局部最优等问题,DCGAN相对于普通GAN的优点是能够生成更加逼真、清晰的图像。
因为DCGAN是在GAN的基础上的改造,所以本篇只针对GAN的改造点进行讲解,其他还有不太了解的原理可以返回上一篇进行观看。
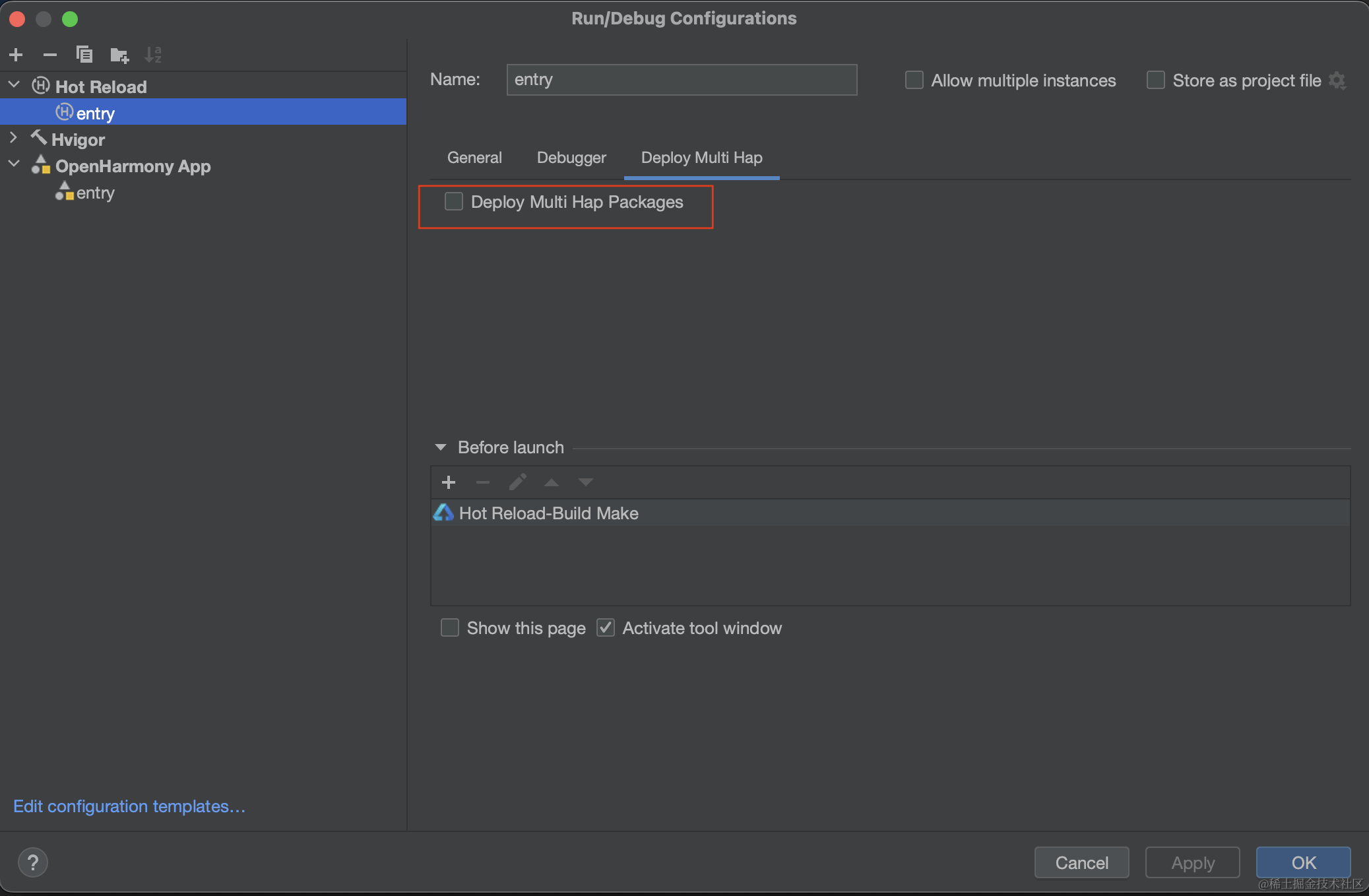
本文仍然使用MNIST手写数字数据集来构建一个深度卷积GAN(Deep Convolutional GAN)DCGAN,将使用卷积来替代全连接层,点击查看论文,generator的网络结构图如下:

DCGAN模型有以下特点:
- 判别器模型使用卷积步长取代了空间池化,生成器模型中使用反卷积操作扩大数据维度。
- 除了生成器模型的输出层和判别器模型的输入层,在整个对抗网络的其它层上都使用了Batch Normalization,原因是Batch Normalization可以稳定学习,有助于优化初始化参数值不良而导致的训练问题。
- 整个网络去除了全连接层,直接使用卷积层连接生成器和判别器的输入层以及输出层。
- 在生成器的输出层使用Tanh激活函数以控制输出范围,而在其它层中均使用了ReLU激活函数;在判别器上使用Leaky ReLU激活函数。
代码
model.py:
from torch import nn
class Generator(nn.Module):
def __init__(self, z_dim=10, im_chan=1, hidden_dim=64):
super(Generator, self).__init__()
self.z_dim = z_dim
# Build the neural network
self.gen = nn.Sequential(
self.make_gen_block(z_dim, hidden_dim * 4),
self.make_gen_block(hidden_dim * 4, hidden_dim * 2, kernel_size=4, stride=1),
self.make_gen_block(hidden_dim * 2, hidden_dim),
self.make_gen_block(hidden_dim, im_chan, kernel_size=4, final_layer=True),
)
def make_gen_block(self, input_channels, output_channels, kernel_size=3, stride=2, final_layer=False):
if not final_layer:
return nn.Sequential(
nn.ConvTranspose2d(input_channels, output_channels, kernel_size=kernel_size, stride=stride),
nn.BatchNorm2d(output_channels),
nn.ReLU(inplace=True)
)
else: # Final Layer
return nn.Sequential(
nn.ConvTranspose2d(input_channels, output_channels, kernel_size, stride),
nn.Tanh()
)
def unsqueeze_noise(self, noise):
return noise.view(len(noise), self.z_dim, 1, 1) # [b,c,h,w]
def forward(self, noise):
x = self.unsqueeze_noise(noise)
return self.gen(x)
class Discriminator(nn.Module):
def __init__(self, im_chan=1, hidden_dim=16):
super(Discriminator, self).__init__()
self.disc = nn.Sequential(
self.make_disc_block(im_chan, hidden_dim),
self.make_disc_block(hidden_dim, hidden_dim * 2),
self.make_disc_block(hidden_dim * 2, 1, final_layer=True),
)
def make_disc_block(self, input_channels, output_channels, kernel_size=4, stride=2, final_layer=False):
if not final_layer:
return nn.Sequential(
nn.Conv2d(input_channels, output_channels, kernel_size, stride),
nn.BatchNorm2d(output_channels),
nn.LeakyReLU(0.2, inplace=True)
)
else: # Final Layer
return nn.Sequential(
nn.Conv2d(input_channels, output_channels, kernel_size, stride)
)
def forward(self, image):
disc_pred = self.disc(image)
return disc_pred.view(len(disc_pred), -1)
train.py:
import torch
from torch import nn
from tqdm.auto import tqdm
from torchvision import transforms
from torchvision.datasets import MNIST
from torchvision.utils import make_grid
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
from model import *
torch.manual_seed(0) # Set for testing purposes, please do not change!
def show_tensor_images(image_tensor, num_images=25, size=(1, 28, 28)):
image_tensor = (image_tensor + 1) / 2
image_unflat = image_tensor.detach().cpu()
image_grid = make_grid(image_unflat[:num_images], nrow=5)
plt.imshow(image_grid.permute(1, 2, 0).squeeze())
plt.show()
def get_noise(n_samples, z_dim, device='cpu'):
return torch.randn(n_samples, z_dim, device=device)
criterion = nn.BCEWithLogitsLoss()
z_dim = 64
display_step = 500
batch_size = 1280
# A learning rate of 0.0002 works well on DCGAN
lr = 0.0002
beta_1 = 0.5
beta_2 = 0.999
device = 'cuda'
# You can tranform the image values to be between -1 and 1 (the range of the tanh activation)
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,)),
])
dataloader = DataLoader(
MNIST('.', download=False, transform=transform),
batch_size=batch_size,
shuffle=True)
gen = Generator(z_dim).to(device)
gen_opt = torch.optim.Adam(gen.parameters(), lr=lr, betas=(beta_1, beta_2))
disc = Discriminator().to(device)
disc_opt = torch.optim.Adam(disc.parameters(), lr=lr, betas=(beta_1, beta_2))
def weights_init(m):
if isinstance(m, nn.Conv2d) or isinstance(m, nn.ConvTranspose2d):
torch.nn.init.normal_(m.weight, 0.0, 0.02)
if isinstance(m, nn.BatchNorm2d):
torch.nn.init.normal_(m.weight, 0.0, 0.02)
torch.nn.init.constant_(m.bias, 0)
gen = gen.apply(weights_init)
disc = disc.apply(weights_init)
n_epochs = 500
cur_step = 0
mean_generator_loss = 0
mean_discriminator_loss = 0
for epoch in range(n_epochs):
# Dataloader returns the batches
for real, _ in tqdm(dataloader):
cur_batch_size = len(real)
real = real.to(device)
## Update discriminator ##
disc_opt.zero_grad()
fake_noise = get_noise(cur_batch_size, z_dim, device=device)
fake = gen(fake_noise)
disc_fake_pred = disc(fake.detach())
disc_fake_loss = criterion(disc_fake_pred, torch.zeros_like(disc_fake_pred))
disc_real_pred = disc(real)
disc_real_loss = criterion(disc_real_pred, torch.ones_like(disc_real_pred))
disc_loss = (disc_fake_loss + disc_real_loss) / 2
# Keep track of the average discriminator loss
mean_discriminator_loss += disc_loss.item() / display_step
# Update gradients
disc_loss.backward(retain_graph=True)
# Update optimizer
disc_opt.step()
## Update generator ##
gen_opt.zero_grad()
fake_noise_2 = get_noise(cur_batch_size, z_dim, device=device)
fake_2 = gen(fake_noise_2)
disc_fake_pred = disc(fake_2)
gen_loss = criterion(disc_fake_pred, torch.ones_like(disc_fake_pred))
gen_loss.backward()
gen_opt.step()
# Keep track of the average generator loss
mean_generator_loss += gen_loss.item() / display_step
## Visualization code ##
if cur_step % display_step == 0 and cur_step > 0:
print(f"Step {cur_step}: Generator loss: {mean_generator_loss}, discriminator loss: {mean_discriminator_loss}")
show_tensor_images(fake)
show_tensor_images(real)
mean_generator_loss = 0
mean_discriminator_loss = 0
cur_step += 1

每500个batch展示一次。

可以看到生成器的网络模型不再使用全连接,使用反卷积操作扩大数据维度;在输出层使用Tanh激活函数以控制输出范围,而在其它层中均使用了ReLU激活函数;在隐藏层中每层都使用BN来讲输出归到一定的范围内来稳定学习,使得后层的隐藏单元不过分依赖本层的隐藏单元,减弱内部协变量偏移,从而加速对特征的学习。
因为不再使用全连接而是使用卷积,所以输入的dimension变为channel,所以输入之前先改变noise的shape为(batch_size,channel,high,width)。

判别器的网络模型使用卷积代替的全连接,使用卷积操作减小数据维度;隐藏层中每层在激活之前使用BN。

对生成器和鉴别器的权重进行初始化,对于卷积层和转置卷积层(也就是反卷积层)使用正态分布来初始化权重(均值为0,标准差为0.02)的原因是为了确保权重的初始值具有适当的大小,并且不会过大或过小,从而避免梯度消失或梯度爆炸的问题。
对于BN化层,同样使用正态分布来初始化权重,同时将偏置项初始化为0。这是因为批归一化层在训练中通过调整均值和方差来规范化输入数据,因此初始的权重和偏置项都设置为较小的值,有助于加速网络的收敛。
下一篇构建WGAN_GP。