简介
官网
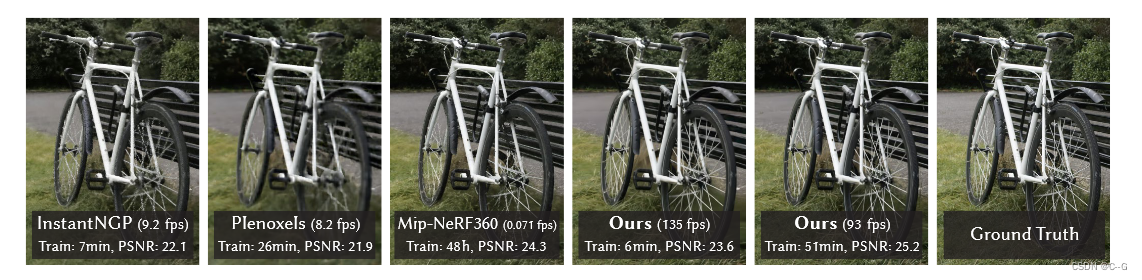
更少训练时间的同时实现最先进的视觉质量,能在1080p分辨率下实现高质量的实时(≥30 fps)新视图合成
NeRF使用隐式场景表示,体素,点云等属于显示建模方法,3DGS就是显示辐射场。它用3D高斯作为灵活高效的表示方法,同时利用神经网络的特性进行参数优化,旨在以更快的训练速度和实时性能实现高质量的渲染,尤其适用于复杂场景和高分辨率输出。
nerf是一个连续的表示,隐含地表示空/占用空间;为了找到空间点的样本,需要进行昂贵的随机抽样,由此产生噪声和计算开销。相比之下,点是一种非结构化的离散表示,它具有足够的灵活性,可以创建、破坏和替换类似于NeRF的几何体。这是通过优化不透明度和位置来实现的,同时避免了完整体积表示的缺点
知识补充
协方差矩阵
方差:度量单个随机变量的离散程度,越大,越离散
V
a
r
(
x
)
=
1
n
−
1
∑
i
=
1
n
(
x
i
−
μ
x
)
2
\begin{align} Var(x) = \frac{1}{n-1}\sum^n_{i=1}(x_i-\mu_x)^2 \end{align}
Var(x)=n−11i=1∑n(xi−μx)2
n为样本量,
μ
x
\mu_x
μx表示观测样本的均值
协方差:两个个随机变量的相似程度,负数为负相关,正数为正相关,0为无关
C
o
v
(
a
,
b
)
=
n
−
1
∑
i
=
1
n
(
a
i
−
μ
a
)
(
b
i
−
μ
b
)
\begin{align} Cov(a,b)=\frac{n-1}\sum^n_{i=1}(a_i-\mu_a)(b_i-\mu_b) \end{align}
Cov(a,b)=∑n−1i=1n(ai−μa)(bi−μb)
方差也可以看作是自己对自己求协方差
协方差矩阵
Σ
=
[
C
o
v
(
x
1
,
x
1
)
C
o
v
(
x
1
,
x
2
)
⋯
C
o
v
(
x
1
,
x
d
)
C
o
v
(
x
2
,
x
1
)
C
o
v
(
x
2
,
x
2
)
⋯
C
o
v
(
x
2
,
x
d
)
⋮
⋮
⋱
⋮
C
o
v
(
x
d
,
x
1
)
C
o
v
(
x
d
,
x
2
)
⋯
C
o
v
(
x
d
,
x
d
)
]
∈
R
d
×
d
\begin{align} \Sigma = \begin{bmatrix} {Cov(x_1,x_1)}&{Cov(x_1,x_2)}&{\cdots}&{Cov(x_1,x_d)}\\ {Cov(x_2,x_1)}&{Cov(x_2,x_2)}&{\cdots}&{Cov(x_2,x_d)}\\ {\vdots}&{\vdots}&{\ddots}&{\vdots}\\ {Cov(x_d,x_1)}&{Cov(x_d,x_2)}&{\cdots}&{Cov(x_d,x_d)}\\ \end{bmatrix} \in R^{d \times d} \end{align}
Σ=
Cov(x1,x1)Cov(x2,x1)⋮Cov(xd,x1)Cov(x1,x2)Cov(x2,x2)⋮Cov(xd,x2)⋯⋯⋱⋯Cov(x1,xd)Cov(x2,xd)⋮Cov(xd,xd)
∈Rd×d
对角线上的元素为各个随机变量的方差,非对角线上的元素为两两随机变量之间的协方差,协方差矩阵是对称矩阵
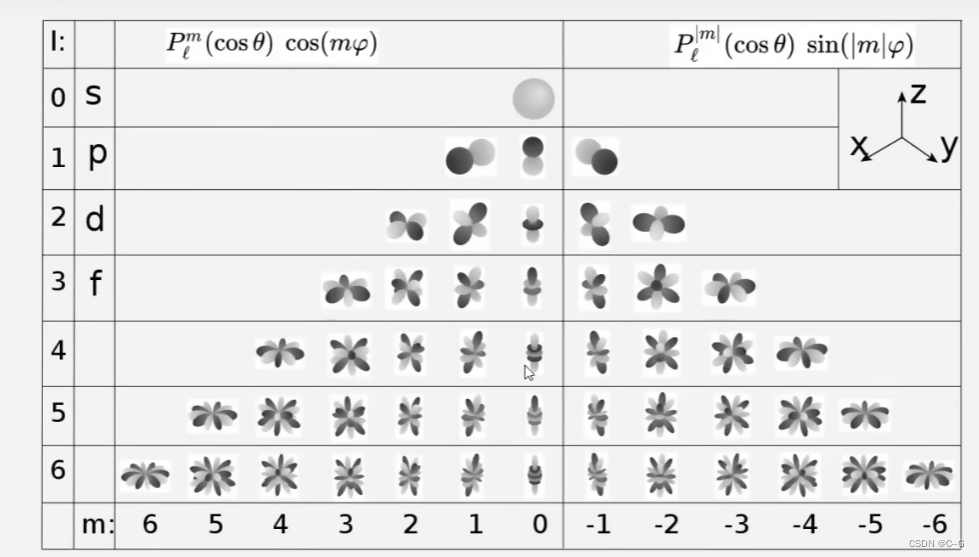
球谐函数
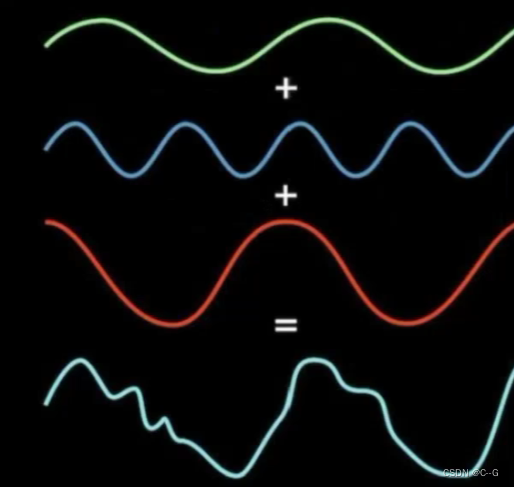
如高等数学中的傅里叶变换,任何一个二维函数可以分解为不同的正弦与余弦之和:
f
(
x
)
=
a
0
+
∑
n
=
1
+
∞
a
n
cos
n
π
i
x
+
b
n
sin
n
π
i
x
\begin{align} f(x) = a_0 + \sum^{+\infty}_{n=1}a_n\cos {\frac{n\pi}{i}}x+b_n\sin {\frac{n\pi}{i}}x \end{align}
f(x)=a0+n=1∑+∞ancosinπx+bnsininπx
这里的
cos
n
π
l
x
\cos {\frac{n\pi}{l}}x
coslnπx 和
sin
n
π
l
x
\sin {\frac{n\pi}{l}}x
sinlnπx叫做基函数,原则上讲当
n
→
+
∞
n \to +\infty
n→+∞时,可以完美拟合这个函数,也可以对这个函数进行近似
f
(
x
)
≈
a
0
+
∑
n
=
1
i
a
n
cos
n
π
i
x
+
b
n
sin
n
π
i
x
\begin{align} f(x) \approx a_0 + \sum^{i}_{n=1}a_n\cos {\frac{n\pi}{i}}x+b_n\sin {\frac{n\pi}{i}}x \end{align}
f(x)≈a0+n=1∑iancosinπx+bnsininπx
如果函数是一个有界的,闭合的,平滑的曲面呢?

可以表示为下述坐标形式
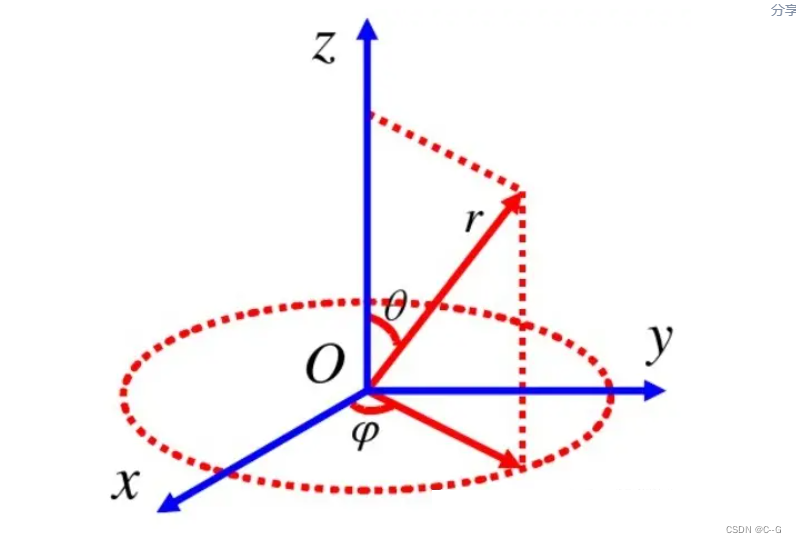
用球面函数表示方法来表示
f
(
θ
,
ψ
)
f(\theta,\psi)
f(θ,ψ),这个函数也有自己基函数组成
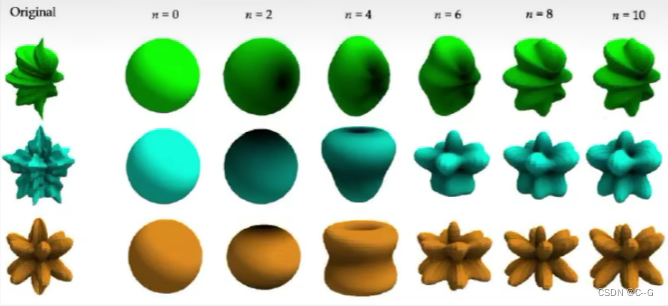
球面函数的基函数是
高斯分布
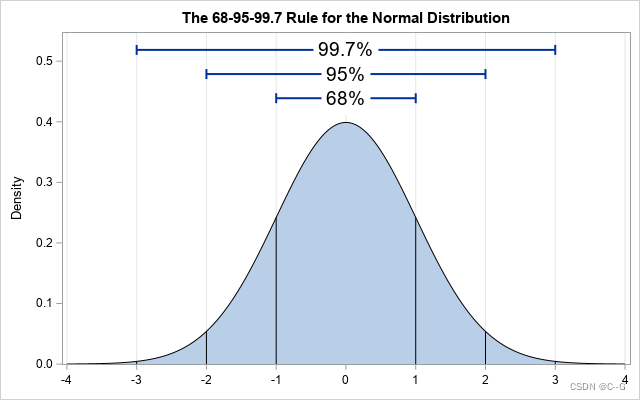
一维高斯分布
p
(
x
)
=
1
2
π
σ
e
−
(
x
−
μ
)
2
2
σ
2
\begin{align} p(x) = \frac{1}{\sqrt{2\pi}\sigma}e^{-\frac{(x-\mu)^2}{2\sigma^2}} \end{align}
p(x)=2πσ1e−2σ2(x−μ)2
均值为
μ
\mu
μ,方差为
σ
\sigma
σ,数据以99%的概率落在
μ
−
3
σ
\begin{smallmatrix}\mu-3\sigma\end{smallmatrix}
μ−3σ到
μ
+
3
σ
\begin{smallmatrix}\mu+3\sigma\end{smallmatrix}
μ+3σ之间
二维标准高斯分布( μ = 0 , σ = 1 \mu=0,\sigma=1 μ=0,σ=1)
因为是标准二维高斯分布,所以每个变量之间是独立的
p
(
x
,
y
)
=
p
(
x
)
p
(
y
)
=
1
2
π
e
(
−
x
2
+
y
2
2
)
\begin{align} p(x,y)=p(x)p(y)=\frac{1}{2\pi}e^{(-\frac{x^2+y^2}{2})} \end{align}
p(x,y)=p(x)p(y)=2π1e(−2x2+y2)
为了向量化公式,用向量
v
=
[
x
y
]
T
\begin{smallmatrix}v=[x y]^T\end{smallmatrix}
v=[xy]T表示
p
(
v
)
=
1
2
π
e
−
1
2
v
T
v
\begin{align} p(v)=\frac{1}{2\pi}e^{-\frac{1}{2}v^Tv} \end{align}
p(v)=2π1e−21vTv
这个时候,用
v
=
A
(
x
−
μ
)
\begin{smallmatrix}v=A(x-\mu)\end{smallmatrix}
v=A(x−μ),其中的 A 为 V 中每个分量的线性组合系数,也就是说 A 表示了每个变量的线性关系
p
(
v
)
=
∣
A
∣
2
π
e
−
1
2
(
x
−
μ
)
T
A
T
A
(
x
−
μ
)
\begin{align} p(v) = \frac{|A|}{2\pi}e^{-\frac{1}{2}(x-\mu)^TA^TA(x-\mu)} \end{align}
p(v)=2π∣A∣e−21(x−μ)TATA(x−μ)
用
Σ
=
(
A
T
A
)
−
1
\begin{smallmatrix}\Sigma=(A^TA)^{-1}\end{smallmatrix}
Σ=(ATA)−1表示其协方差,其中 |A|为行列式
p
(
v
)
=
1
2
π
∣
Σ
∣
1
2
e
−
1
2
(
x
−
μ
)
T
Σ
−
1
(
x
−
μ
)
\begin{align} p(v) = \frac{1}{2\pi|\Sigma|^{\frac{1}{2}}} e^{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)} \end{align}
p(v)=2π∣Σ∣211e−21(x−μ)TΣ−1(x−μ)
图像为
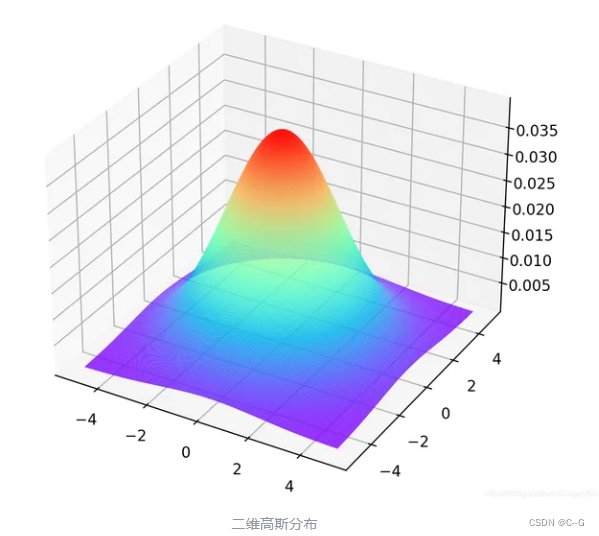
多维高斯分布
p
(
x
)
=
1
(
2
π
)
N
2
∣
Σ
∣
e
−
1
2
(
x
−
μ
)
T
Σ
−
1
(
x
−
μ
)
\begin{align} p(x) = \frac{1}{ (2\pi)^{\frac{N}{2}} |\Sigma| }e^{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)} \end{align}
p(x)=(2π)2N∣Σ∣1e−21(x−μ)TΣ−1(x−μ)
假设一个向量 x 服从均值向量为 μ \mu μ 、协方差矩阵为 Σ \Sigma Σ 的多元正态分布,令 μ = 0 \begin{smallmatrix}\mu=0\end{smallmatrix} μ=0,由于指数项外面的系统 1 ( 2 π ) N 2 ∣ Σ ∣ \begin{smallmatrix}\frac{1}{ (2\pi)^{\frac{N}{2}} |\Sigma| }\end{smallmatrix} (2π)2N∣Σ∣1通常为常数,去掉后简化为:
p ( x ) ∝ e − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) \begin{align} p(x) \propto e^{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)} \end{align} p(x)∝e−21(x−μ)TΣ−1(x−μ)
三维高斯的图像可以想象一个突起的小山坡
固定概率为 p 的三维高斯分布是什么样呢?
e − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) = p ( x − μ ) T Σ ( x − μ ) = − 2 ln p \begin{align} e^{-\frac{1}{2}(x-\mu)^T\Sigma^-1(x-\mu)} &= p \\ \nonumber (x-\mu)^T\Sigma(x-\mu) &= -2\ln p \end{align} e−21(x−μ)TΣ−1(x−μ)(x−μ)TΣ(x−μ)=p=−2lnp
这里 − 2 ln p -2\ln p −2lnp是常数C, Σ \Sigma Σ是实对称矩阵,令 Σ = P T Λ P \begin{smallmatrix}\Sigma=P^T \Lambda P\end{smallmatrix} Σ=PTΛP
( x − μ ) T P T Λ P ( x − μ ) = C ( P ( x − μ ) ) T Λ P ( x − μ ) = C \begin{align} (x-\mu)^TP^T\Lambda P(x-\mu) &= C \\ \nonumber (P(x-\mu))^T \Lambda P(x-\mu) &= C \end{align} (x−μ)TPTΛP(x−μ)(P(x−μ))TΛP(x−μ)=C=C
y = P ( x − μ ) y=P(x-\mu) y=P(x−μ),令
Λ = [ σ 1 2 0 0 0 σ 2 2 0 0 0 σ 3 2 ] \begin{align} \Lambda= \begin{bmatrix} {\sigma^2_1}&{0}&{0}\\ {0}&{\sigma^2_2}&{0}\\ {0}&{0}&{\sigma^2_3} \end{bmatrix} \end{align} Λ= σ12000σ22000σ32
原子式变为
C
=
y
T
Λ
y
=
σ
1
2
y
1
2
+
σ
2
2
y
2
2
+
σ
3
2
y
3
2
C=y^T\Lambda y = \sigma^2_1y^2_1 + \sigma^2_2y^2_2 + \sigma^2_3y^2_3
C=yTΛy=σ12y12+σ22y22+σ32y32
该公式是标准的椭球方程,所以原子式就是把标准椭球经过旋转变换
P
−
1
P^{-1}
P−1,再挪到
μ
\mu
μ点得到。所以对于一个三维高斯而言,同一个椭球表面其概率密度相同,离
μ
\mu
μ越远,其概率越小。
一个多元高斯轴的长度为
Σ
\Sigma
Σ的特征值。
和一维一样,有99%的概率落在
3
σ
1
3\sigma_1
3σ1,
3
σ
2
3\sigma_2
3σ2,
3
σ
3
3\sigma_3
3σ3所在的椭球内,
σ
1
,
σ
2
,
σ
3
\sigma_1,\sigma_2,\sigma_3
σ1,σ2,σ3为
Σ
\Sigma
Σ的特征值
高斯分布的性质
- 高斯函数的傅里叶变换还是高斯函数
- 高斯函数与高斯函数的卷积仍是高斯函数
- 高斯分布经仿射变换后仍是高斯分布
- 多元高斯分布的边缘分布仍是高斯分布
图形学渲染——坐标变换
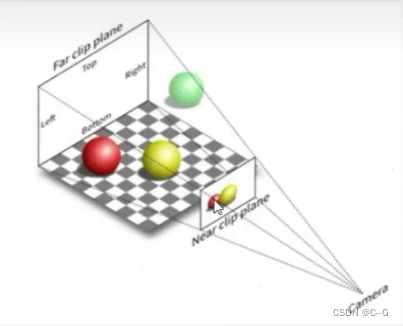
传统图形学的渲染管道里,需要把空间的物体投影到相机平面,也就是需要指导空间每个点到特点相机平面上的位置是多少,传统图形学的流程是:
先把视锥内物体进行一个透视投影,压缩到一个非透视的空间内,然后使用正交投影,将视锥内物体压缩到各维度为[-1,1]的空间内
透视投影就是最类似人眼所看东西的方式,遵循近大远小,如果说正交投影都是水平光线,那么透视投影则显然不是了(左透视,右正交)
透视投影

此时,投影过程可用下图解释,将 (x,y,z)一点投影至投影屏幕之后,他的坐标变为( x′ , y′ , z′ )

图中原点代表视点,z = -n 代表投影平面,利用相似三角形性质不难得出图中投影之后的坐标
那么利用齐次坐标的性质,希望找到一个矩阵完成如下变换

如果形象化的描述一下的话,就是利用这个变换矩阵将整个空间压缩了一下,使其对应了真正透视投影的坐标,最后不要忘了要利用正交转换到
[
−
1
,
1
]
3
[-1,1]^3
[−1,1]3的空间之内
首先,这个矩阵的前两行和最后一行是能很快确定出来的,根据最后的齐次坐标,如下:

那么如何确定第三行呢,这里就要运用透视投影的一个性质:
可视空间,前后面变换之后 z 坐标不变





得最后变换矩阵为

正交投影

正交投影是相对简单的一种,坐标的相对位置都不会改变,所有光线都是平行传播,只需将物体(可视部分,即上图的那个长方体)全部转换到一个 [ − 1 , 1 ] 3 [-1,1]^3 [−1,1]3的空间之中即可(其中x,y坐标便是投影结果,保留z是为了之后的遮挡检测),这只是为了之后的计算更加的方便而已,在转换到屏幕坐标的时候就会重新拉伸回来,所有物体的相对大小位置都不会有任何变化


总的变换公式为

3D Gaussian Splatting
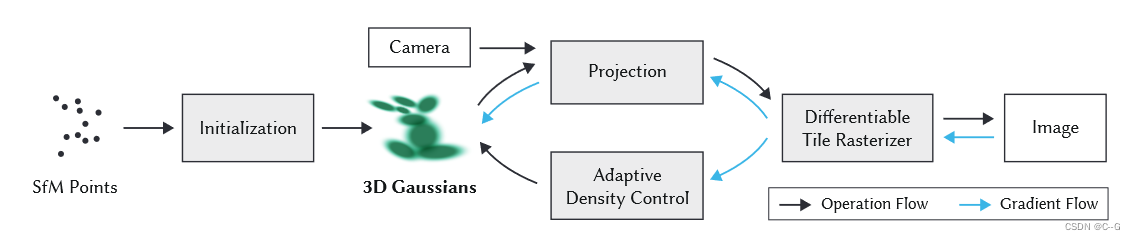
空间点
和particle-based rendering一样,因为点没有体积,所以需要对它进行一个扩展,扩展方式与传统的particle-based rendering 不同,它用3D Gaussian表示
高斯分布由在世界空间中定义的全三维协方差矩阵 Σ \Sigma Σ定义,以点(mean)为中心
G ( x ) = e − 1 2 ( x ) T Σ − 1 ( x ) \begin{align} G(x) = e^{-\frac{1}{2}(x)^T\Sigma^{-1}(x)} \end{align} G(x)=e−21(x)TΣ−1(x)
这和前面说的3D Gaussian表示一样,省去了常数项,这种表示具有更强的灵活性,用更少的点表示更复杂的形状
3D 高斯的属性包括:
- 每个点的坐标(中心位置, μ \mu μ)
- 每个点的高斯表示中的 Σ \Sigma Σ
- 每个点的颜色
- 每个点的不透明度 α \alpha α
Σ \Sigma Σ(协方差矩阵)
正定矩阵:
若所有特征值均大于零,则称为正定
A 是 n 阶方阵,如果对任何非零向量 x,都有 x T A x > 0 x^TAx>0 xTAx>0, x T x^T xT表示x的转置,则A为正定矩阵。
半正定矩阵:
若所有特征值均不小于零,则称为半正定
A 是 实对称矩阵,如果对任何实非零列向量 x,都有 x T A x > 0 x^TAx>0 xTAx>0, x T x^T xT表示x的转置,则A为正定矩阵
这里的
Σ
\Sigma
Σ(协方差矩阵)是一个半正定矩阵,要保证这个半正定条件,所以不能对其随机初始化,假定:
Σ
=
R
Λ
R
T
=
R
Λ
1
2
Λ
1
2
R
T
=
(
R
Λ
1
2
)
(
R
Λ
1
2
)
T
\begin{align} \Sigma &= R\Lambda R^T \\ \nonumber &=R\Lambda^{\frac{1}{2}}\Lambda^{\frac{1}{2}}R^T \\ &= (R\Lambda^{\frac{1}{2}})(R\Lambda^{\frac{1}{2}})^T \end{align}
Σ=RΛRT=RΛ21Λ21RT=(RΛ21)(RΛ21)T
其中R是一个正交矩阵,可以理解为旋转矩阵,
Λ
1
2
\Lambda^{\frac{1}{2}}
Λ21是一个全为正数的对角矩阵,可以理解为缩放矩阵,论文的表示为:
Σ
=
R
S
S
T
R
T
\begin{align} \Sigma=RSS^TR^T \end{align}
Σ=RSSTRT
点的颜色 c
为了模拟高光的点,会加入方向向量,使得从不同方向得到不同的颜色,这里使用球谐函数表示。
渲染公式
NeRF体渲染公式
C = ∑ i = 1 N T i ( 1 − e − σ i δ i ) c i w i t h T i = e − ∑ j = 1 i − 1 σ j δ j \begin{align} C &= \sum^N_{i=1}T_i(1-e^{-\sigma_i\delta_i})c_i \ with \\ \nonumber T_i &= e^{-\sum^{i-1}_{j=1}\sigma_j\delta_j} \end{align} CTi=i=1∑NTi(1−e−σiδi)ci with=e−∑j=1i−1σjδj
同样的这里也使用类似的方式
C = ∑ i ∈ N c i α i ∏ j = 1 i − 1 ( 1 − α i ) \begin{align} C = \sum_{i\in N} c_i\alpha_i \prod^{i-1}_{j=1}(1-\alpha_i) \end{align} C=i∈N∑ciαij=1∏i−1(1−αi)
c i c_i ci是每个点的颜色, α i \alpha_i αi是通过对协方差 Σ \Sigma Σ乘以每个点不透明度的二维高斯函数进行评估得到
投影(泼溅splatting)
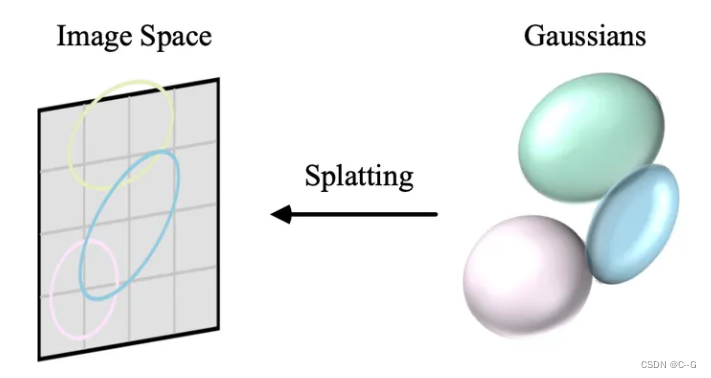
现在,空间点是3D高斯(椭球),携带了中心位置 μ \mu μ、不透明度 σ \sigma σ、3D协方差矩阵 Σ \Sigma Σ和颜色 c ,渲染方程也如上表述。那么现在就是将3D高斯(椭球)投影到2D图像空间(椭圆)进行渲染。
透视投影
给定视图变化 W ,3D协方差矩阵
Σ
\Sigma
Σ 从世界坐标转换到相机坐标的公式如下:
Σ
c
′
=
W
Σ
W
T
\begin{align} \Sigma^\prime_c = W \Sigma W^T \end{align}
Σc′=WΣWT
正交投影
如上述知识补充,我们可以直接用正交投影获得相机平面投影,但是,原始正交头像不考虑z坐标,而渲染公式中需要3D高斯(椭球)的先后顺序(深度),为此,对正交投影进行修改。
假设相机坐标
(
t
1
,
t
2
,
t
3
)
(t_1,t_2,t_3)
(t1,t2,t3),对其进行压缩到
(
x
1
,
x
2
,
x
3
)
(x_1,x_2,x_3)
(x1,x2,x3),公式为:
x
1
=
t
1
t
3
x
2
=
t
2
t
3
x
3
=
t
1
2
+
t
2
2
+
t
3
2
\begin{align} x_1&=\frac{t_1}{t_3} \\ \nonumber x_2&=\frac{t_2}{t_3} \\ \nonumber x_3&=\sqrt{t^2_1+t^2_2+t^2_3} \end{align}
x1x2x3=t3t1=t3t2=t12+t22+t32
x 3 x_3 x3的设计是非线性变换,无法通过求解一个变换矩阵求解出来,但是可以用一个线性变换对这个非线性变换进行近似,如泰勒展示式那样:
f ( x ) ≈ f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) \begin{align} f(x) \approx f(x_0)+f^\prime(x_0)(x-x_0) \end{align} f(x)≈f(x0)+f′(x0)(x−x0)
f
(
x
)
f(x)
f(x)的情况就是为
R
→
R
R \to R
R→R的情况,为了把拓展为高维的
R
m
→
R
n
R^m \to R^n
Rm→Rn,使用雅可比矩阵:
f
(
x
)
≈
f
(
x
0
)
+
J
(
x
−
x
0
)
\begin{align} f(x) \approx f(x_0) + J(x-x_0) \end{align}
f(x)≈f(x0)+J(x−x0)
J是雅可比矩阵,可以看作一阶导的多维形式,假设输入为:
x
1
,
x
2
,
⋯
,
x
m
x_1,x_2,\cdots,x_m
x1,x2,⋯,xm,输出为:
y
1
,
y
2
,
⋯
,
y
n
y_1,y_2,\cdots,y_n
y1,y2,⋯,yn:
J = [ ∂ y 1 x 1 ∂ y 1 x 2 ⋯ ∂ y 1 x m ∂ y 2 x 1 ∂ y 2 x 2 ⋯ ∂ y 2 x m ⋮ ⋮ ⋱ ⋮ ∂ y n x 1 ∂ y n x 2 ⋯ ∂ y n x m ] \begin{align} J = \begin{bmatrix} { \frac{\partial y_1}{x_1} } & { \frac{\partial y_1}{x_2} } & {\cdots} & {\frac{\partial y_1}{x_m}} \\ { \frac{\partial y_2}{x_1} } & { \frac{\partial y_2}{x_2} } & {\cdots} & {\frac{\partial y_2}{x_m}} \\ {\vdots}&{\vdots}&{\ddots}&{\vdots} \\ { \frac{\partial y_n}{x_1} } & { \frac{\partial y_n}{x_2} } & {\cdots} & {\frac{\partial y_n}{x_m}} \\ \end{bmatrix} \end{align} J= x1∂y1x1∂y2⋮x1∂ynx2∂y1x2∂y2⋮x2∂yn⋯⋯⋱⋯xm∂y1xm∂y2⋮xm∂yn
那么前面的非线性变换可以使用下述公式进行近视,其雅可比矩阵为:
[
1
t
3
0
−
t
1
t
3
0
1
t
3
−
t
2
t
3
t
1
t
1
2
+
t
2
2
+
t
3
2
t
2
t
1
2
+
t
2
2
+
t
3
2
t
3
t
1
2
+
t
2
2
+
t
3
2
]
\begin{align} \begin{bmatrix} {\frac{1}{t_3}} & {0} &{-\frac{t_1}{t_3}} \\ {0} & {\frac{1}{t_3}} &{-\frac{t_2}{t_3}} \\ {\frac{t_1}{\sqrt{t^2_1+t^2_2+t^2_3} } } & {\frac{t_2}{\sqrt{t^2_1+t^2_2+t^2_3} } } & {\frac{t_3}{\sqrt{t^2_1+t^2_2+t^2_3} } } \end{bmatrix} \end{align}
t310t12+t22+t32t10t31t12+t22+t32t2−t3t1−t3t2t12+t22+t32t3
对每个高斯在其中心点展开,得到其雅可比矩阵,就可以得到这个高斯的线性变换矩阵。根据高斯分布的性质(高斯分布经仿射变换后仍是高斯分布),如果一个线性变换 A x + b \begin{smallmatrix}Ax+b\end{smallmatrix} Ax+b,高斯分布经过这个变换之后:
μ ′ = A μ + b \begin{align} \mu^\prime = A\mu+b \end{align} μ′=Aμ+b
等同于对线性矩阵 Σ \Sigma Σ进行下面操作:
Σ ′ = A Σ A T \begin{align} \Sigma^\prime = A\Sigma A^T \end{align} Σ′=AΣAT
给定视图变化W,3D高斯(椭球)从世界坐标到相机坐标再到相机平面的变换公式为:
Σ
′
=
J
W
Σ
W
T
J
T
\begin{align} \Sigma^\prime = JW\Sigma W^TJ^T \end{align}
Σ′=JWΣWTJT
J为雅可比矩阵,最终就得到了3D高斯投影到相机平面的椭圆
相机平面是2D的,z坐标是用来评估3D高斯先后顺序(深度)的,当丢弃 Σ ′ \Sigma^\prime Σ′的第三行和第三列(z坐标)就是投影到相机平面的协方差矩阵了。
像素点着色
要计算像素点的着色,首先需要知道哪些高斯投影到这个像素点上。投影部分已经知道3D高斯经过仿射变换后投影到平面的高斯,也知道了99%的概率会落在 3 σ 1 , 3 σ 2 3\sigma_1,3\sigma_2 3σ1,3σ2之内,为了简化计算,将范围扩大为 ( m a x ( 3 σ 1 , 3 σ 2 ) , m a x ( 3 σ 1 , 3 σ 2 ) ) (max(3\sigma_1,3\sigma_2),max(3\sigma_1,3\sigma_2)) (max(3σ1,3σ2),max(3σ1,3σ2)).
titles(图像块)
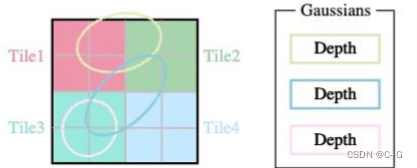
为了避免为每个像素计算有序列表的计算成本,3D GS将精度从像素级别转移到块级别细节。3D GS 将图像划分为多个不重叠的图像块(titles),每个块包含
16
×
16
16\times16
16×16像素。进一步确定哪些图像块与投影的高斯(椭圆)相交。
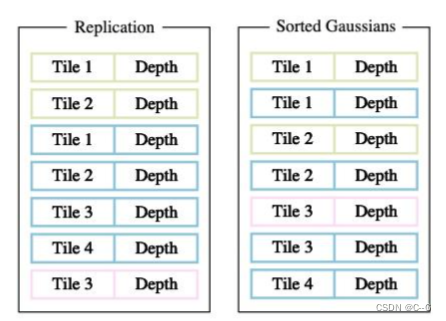
一个投影的高斯可能覆盖多个块,一种合理的方法是复制高斯,为每个副本分配一个标识符(即块ID)
3D GS 会将各自的块 ID 与每个高斯视图变换得到的深度值结合起来。这样就得到了一个未排序的字节列表,其中高位代表块 ID,低位表示深度。这样,使用快速排序后的列表就可以直接用于渲染公式。
每个块和像素的渲染都是独立进行的,因此这一过程非常适合并行计算。另外一个好处是,每个块的像素都可以访问一个公共的共享内存,并保持一个统一的读取序列,从而提高渲染的并行执行效率。在原论文的官方实现中,该框架将块和像素的处理分别视为类似于 CUDA 编程架构中的block和thread。
Adaptive Control
3D GS 是从 structure-from-motion (SfM) 或随机初始化的初始稀疏点集开始的。然后,采用点密集化和剪枝来控制场景中 3D 高斯的密度。
为了稳定,在较低分辨率下“预热”计算。具体来说,使用4倍小的图像分辨率开始优化,并在250次和500次迭代后进行两次上采样。
每100次迭代进行一次密集化,根据当前情况对高斯进行去除或增加
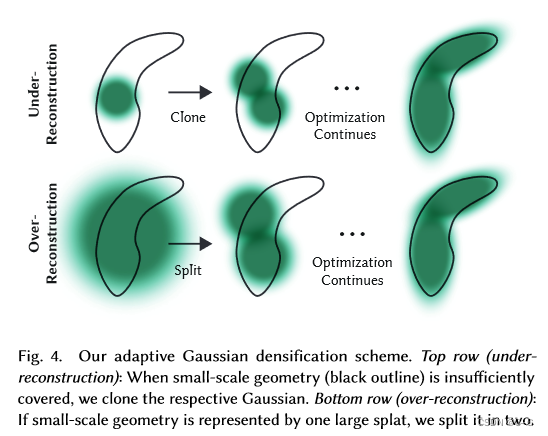
密集化:某些地方的高斯不足。坐标梯度较大(大于阈值 τ p o s \tau_{pos} τpos 0.0002)的地方就表示这里高斯不合适。这涉及到在重建不足的区域克隆小高斯,或者在重建过度的区域拆分大高斯。克隆时,创建一个高斯的副本,并向位置梯度移动。对于分割,则是用两个较小的高斯替换一个较大的高斯,将其比例缩小一个特定的系数。这一步骤旨在优化高斯在三维空间中的分布和表现,从而提高重建的整体质量
剪枝:当透明度非常低 α \alpha α低于某个阈值或者离相机距离非常近(可能是floater)则去掉。这在某种程度上可以看作是一个正则化过程。这样就能有控制地增加必要的高斯密度,同时剔除多余的高斯。这一过程不仅有助于节省计算资源,还能确保模型中的高斯保持精确,从而有效地表现场景。
参数优化
使用sigmoid激活函数将 α \alpha α约束在[0−1)范围内并获得平滑梯度,指数激活函数用于协方差的尺度。
3D GS 的损失函数与 NeRF 的略有不同。由于射线步进计算成本高昂,NeRFs通常在像素级别而不是图像级别进行 loss 的计算。
L = ( 1 − λ ) L 1 + λ L D − S S I M \begin{align} \mathcal{L} = (1-\lambda)\mathcal{L}_1 + \lambda\mathcal{L}_{D-SSIM} \end{align} L=(1−λ)L1+λLD−SSIM
λ = 0.2 \lambda=0.2 λ=0.2
SH系数优化对缺乏角度信息很敏感。对于典型的“类似nerf”的捕捉,即通过在其周围的整个半球拍摄的照片来观察中心物体,优化效果很好。然而,如果捕获有角度区域缺失(例如,当捕获场景的角落时,或执行“由内到外”),则可以通过优化产生SH的零阶分量(即基本色或漫反射色)的完全不正确的值。为了克服这个问题,首先只优化零阶分量,然后在每1000次迭代之后引入SH的一个波段,直到表示所有SH的4个波段。
3D高斯的大多数属性可以通过反向传播直接优化。需要注意的是,直接优化协方差矩阵 Σ \Sigma Σ 可能得到非半正定矩阵,这不符合通常与协方差矩阵相关联的物理解释。为了避免这个问题,3D GS 选择优化一个四元数 q 和一个三维向量 s。q 和 s 分别表示旋转和缩放。这样可以显式的将待优化的参数从9个变为4个。
q = q r + q i ⋅ i + q j ⋅ j + q k ⋅ k \begin{align} q = q_r+q_i\cdot i+q_j\cdot j+q_k\cdot k \end{align} q=qr+qi⋅i+qj⋅j+qk⋅k
为了避免自动微分的成本,3D GS 推导了 q 和 s 的梯度,以便在优化过程中直接计算它们。推导过程可参考 3D GS 原论文的附录A