损失函数
Dice Loss
Dice Loss 是一种用于图像分割的损失函数,其灵感来自于Dice 系数,是一种衡量两个样本相似度的方法。Dice 系数定义为:
Dice 系数 = 2 * TP / (2 * TP + FP + FN)
其中:
TP:预测为正且真实值为正的像素数量
FP:预测为正且真实值为负的像素数量
FN:预测为负且真实值为正的像素数量
Dice 系数的值域为 [0, 1],值越大表示两个样本越相似。
Dice Loss 的定义为:
D
i
c
e
L
o
s
s
=
1
−
D
i
c
e
系数
=
1
−
2
∗
T
P
/
(
2
∗
T
P
+
F
P
+
F
N
)
Dice Loss = 1 - Dice 系数 = 1 - 2 * TP / (2 * TP + FP + FN)
DiceLoss=1−Dice系数=1−2∗TP/(2∗TP+FP+FN)
Dice Loss 的特点:
能够克服类别不平衡问题:Dice Loss 直接使用预测和真实值之间的重叠面积来衡量相似度,因此能够有效克服类别不平衡问题。
梯度平滑:Dice Loss 的梯度是平滑的,这使得模型训练更加稳定。
Dice Loss 的应用:
图像分割:Dice Loss 是图像分割中常用的损失函数,特别适用于分割小目标或不规则目标。
医学图像分割:Dice Loss 在医学图像分割中也得到了广泛应用,例如,用于分割肿瘤、器官等。
Dice Loss 代码讲解
PyTorch 中的 Dice Loss 代码实现如下:
import torch
def dice_loss(pred, target):
# 计算预测和真实值之间的重叠面积
intersection = (pred * target).sum()
# 计算预测和真实值的面积
union = pred.sum() + target.sum()
# 计算 Dice Loss
dice_loss = 1 - (2 * intersection) / union
return dice_loss
.
总结
Dice Loss 是一种用于图像分割的有效损失函数,能够克服类别不平衡问题,并且梯度平滑。其代码实现也比较简单,可以方便地应用于各种图像分割任务。
Lovasz-Softmax损失函数
Lovasz-Softmax损失函数的中文解释和代码解释
- 简介
Lovasz-Softmax损失函数是一种用于图像分割的损失函数,它可以有效地解决分割任务中常见的类别不平衡问题。该函数由Berman等人于2018年提出,并在论文《The Lovasz-Softmax loss: A tractable surrogate for the optimization of the intersection-over-union measure in neural networks》中进行了详细介绍。 - 原理
Lovasz-Softmax损失函数是基于Lovasz扩展构建的,该扩展可以将交并比(IoU)指标转换为一个可优化的损失函数。具体来说,Lovasz-Softmax损失函数可以表示为:
L ( y , p ) = − ∑ i = 1 C 1 C ( 1 − I ( y i , p i ) U ( y i , p i ) ) L(y, p) = - \sum_{i=1}^{C} \frac{1}{C} \left( 1 - \frac{I(y_i, p_i)}{U(y_i, p_i)} \right) L(y,p)=−i=1∑CC1(1−U(yi,pi)I(yi,pi))
其中,
y 是真值标签,
p 是预测概率,
C 是类别数,
I(yi,pi) 是真值标签 yi 和预测概率 pi 的交集,
U(yi,pi) 是真值标签 yi 和预测概率 pi 的并集。
-
优点
Lovasz-Softmax损失函数具有以下优点:
可以有效地解决类别不平衡问题,因为它不依赖于预测概率的绝对值,而是依赖于预测概率的相对大小。
可以获得更准确的分割结果,因为它可以更好地处理边缘像素的分割问题。
具有较强的鲁棒性,因为它可以抵抗噪声和干扰的影响。 -
代码
以下是Lovasz-Softmax损失函数的PyTorch代码实现:
def lovasz_softmax(probas, labels, classes='present'):
"""
Multi-class Lovasz-Softmax loss as described in the paper
"Lovasz-Softmax and Jaccard Hinge Loss for Semantic Segmentation"
(https://arxiv.org/abs/1705.08797).
Args:
probas: (N, C, H, W) logits.
labels: (N, H, W) labels.
classes: 'present' or 'all'.
Returns:
Lovasz-Softmax loss.
"""
if probas.dim() != 4:
raise ValueError("probas must be 4D tensor")
if labels.dim() != 3:
raise ValueError("labels must be 3D tensor")
if classes not in ['present', 'all']:
raise ValueError("classes must be 'present' or 'all'")
inter, union = _lovasz_softmax_inter_union(probas, labels, classes)
loss = 1. - inter / union
return loss.mean()
代码中的主要函数是 _lovasz_softmax_inter_union,该函数用于计算真值标签和预测概率之间的交集和并集。具体来说,该函数的代码如下:
def _lovasz_softmax_inter_union(probas, labels, classes):
"""
计算真值标签和预测概率之间的交集和并集。
参数:
probas: (N, C, H, W) logits。
labels: (N, H, W) 标签。
classes: 'present' 或 'all'。
返回值:
inter, union.
"""
if probas.dim() != 4:
raise ValueError("probas必须是4D张量")
if labels.dim() != 3:
raise ValueError("labels必须是3D张量")
if classes not in ['present', 'all']:
raise ValueError("classes必须是'present'或'all'")
if classes == 'present':
# 计算每个类别的交集和并集
inter, union = _lovasz_softmax_inter_union_present(probas, labels)
elif classes == 'all':
# 计算类别无关的交集和并集
inter, union = _lovasz_softmax_inter_union_all(probas, labels)
else:
raise ValueError("classes必须是'present'或'all'")
return inter, union
align
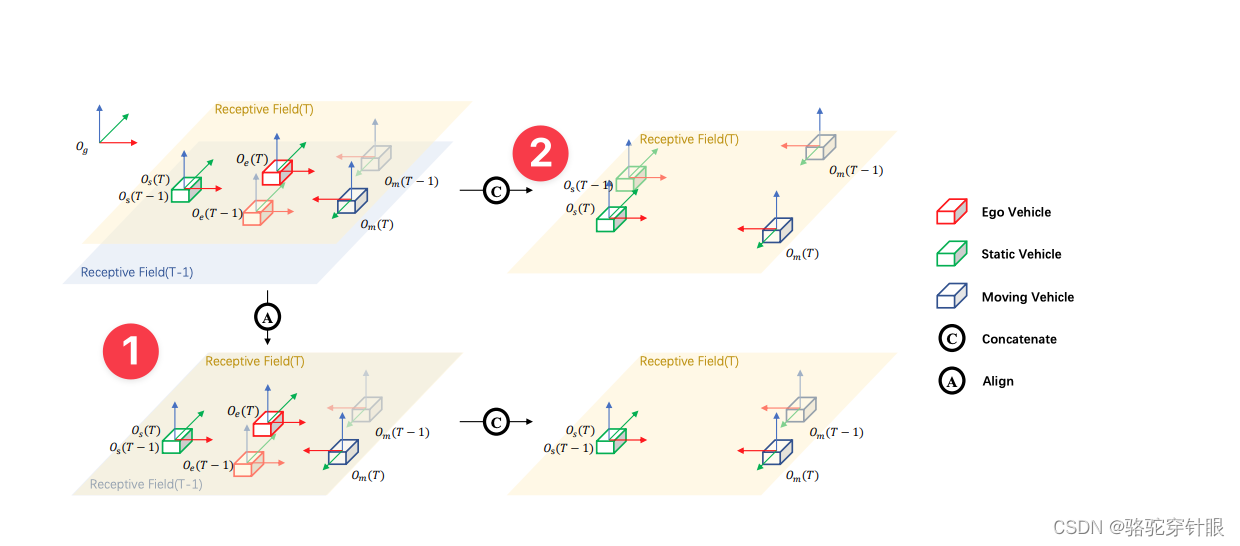
# 获取feat_prev的维度信息,其中_代表批量大小(batch size),C是通道数,H是高度,W是宽度
_, C, H, W = feat_prev.shape
# 使用self.shift_feature方法对feat_prev进行特征对齐
# [sensor2keyegos_curr, sensor2keyegos_prev]用于指定当前帧和前一帧的传感器到关键帧的变换
# bda是变换或对齐参数
feat_prev = \
self.shift_feature(feat_prev,
[sensor2keyegos_curr, sensor2keyegos_prev],
bda)
# 将对齐后的feat_prev重塑,并添加到特征列表bev_feat_list中
# 重塑后的特征尺寸为(1, (self.num_frame - 1) * C, H, W),这里通过self.num_frame - 1计算得到的是
# 除当前帧外的帧数,乘以C得到总的通道数,H和W保持不变
bev_feat_list.append(feat_prev.view(1, (self.num_frame - 1) * C, H, W))
# 使用torch.cat将bev_feat_list中的所有特征在通道维度上进行拼接
# 得到的bev_feat是一个融合了多帧特征的张量
bev_feat = torch.cat(bev_feat_list, dim=1)
# 将融合后的特征张量bev_feat通过一个编码器(self.bev_encoder)进行处理
# 得到x,x是经过编码后的特征,可用于后续的任务,比如分类、回归等
x = self.bev_encoder(bev_feat)
调参
占用网络(Occupancy Networks)的调参策略至关重要。鉴于鸟瞰视图(BEV)架构的网络通常包含众多模块且相对庞大,其训练周期可能根据网络结构和数据规模的不同而变化,通常在1至5天之间。如果训练过程中出现长时间的损失(loss)停滞,将极大拖延实验进度,对科研活动或工作进度造成不利影响。
为了提高调参效率并优化训练过程,以下是一些实用的建议:
**确定批处理大小:**基于可用的数据集大小和资源限制,首先确定合适的批处理大小(batch size)。
优化器选择:在训练初期,避免使用如OneCycleLR这类固定epoch数量的学习率调整策略。由于损失下降趋势无法预先确定,且epoch数量可能会变化,一成不变的策略可能不如其他方法有效。
**学习率调整:**建议初始阶段采用步进式(step-wise)降低学习率的方法。如果发现损失下降幅度有限,可以暂停训练,调低学习率后继续(resume)。通过几轮训练,大致可以找到针对特定数据集和批处理大小的最优配置,然后在此基础上探索不同的网络结构或损失函数。
**热身策略:**制定合理的热身(warm-up)策略,包括初始学习率和迭代次数。
**优化器进阶调整:**如果采用SGD或ADAMw等优化器,除了学习率之外,也应考虑调整权重衰减(weight decay)等其他参数。
数据加载与损失计算优化:在加载真实标签(ground truth)数据和计算损失时,应尽量使用张量(tensor)操作,避免使用for循环。for循环会显著降低数据加载和损失计算的速度,从而拖慢整体训练进度。通常,采用现有的实现框架可以避免这一问题。
遵循以上建议,可以有效地优化占用网络的训练过程,提高实验效率






![[C语言]结构体、位段、枚举常量、联合体](https://img-blog.csdnimg.cn/direct/ec489746976941eaa13d8328ca31860d.png)