FPGA——DDR3的ip核
- IP核配置
- 基于MIG核代码
- 基于AXI接口的DDR3
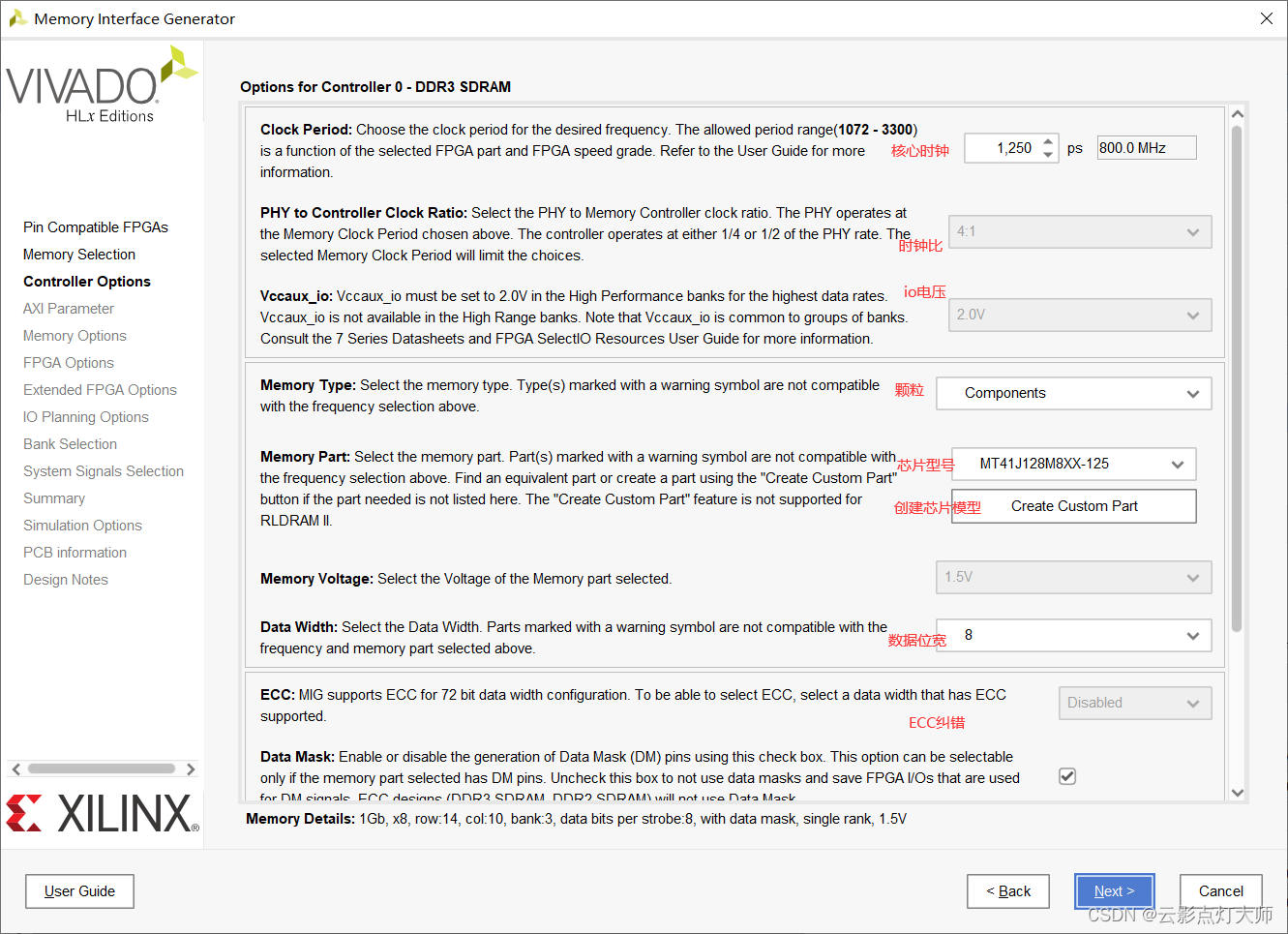
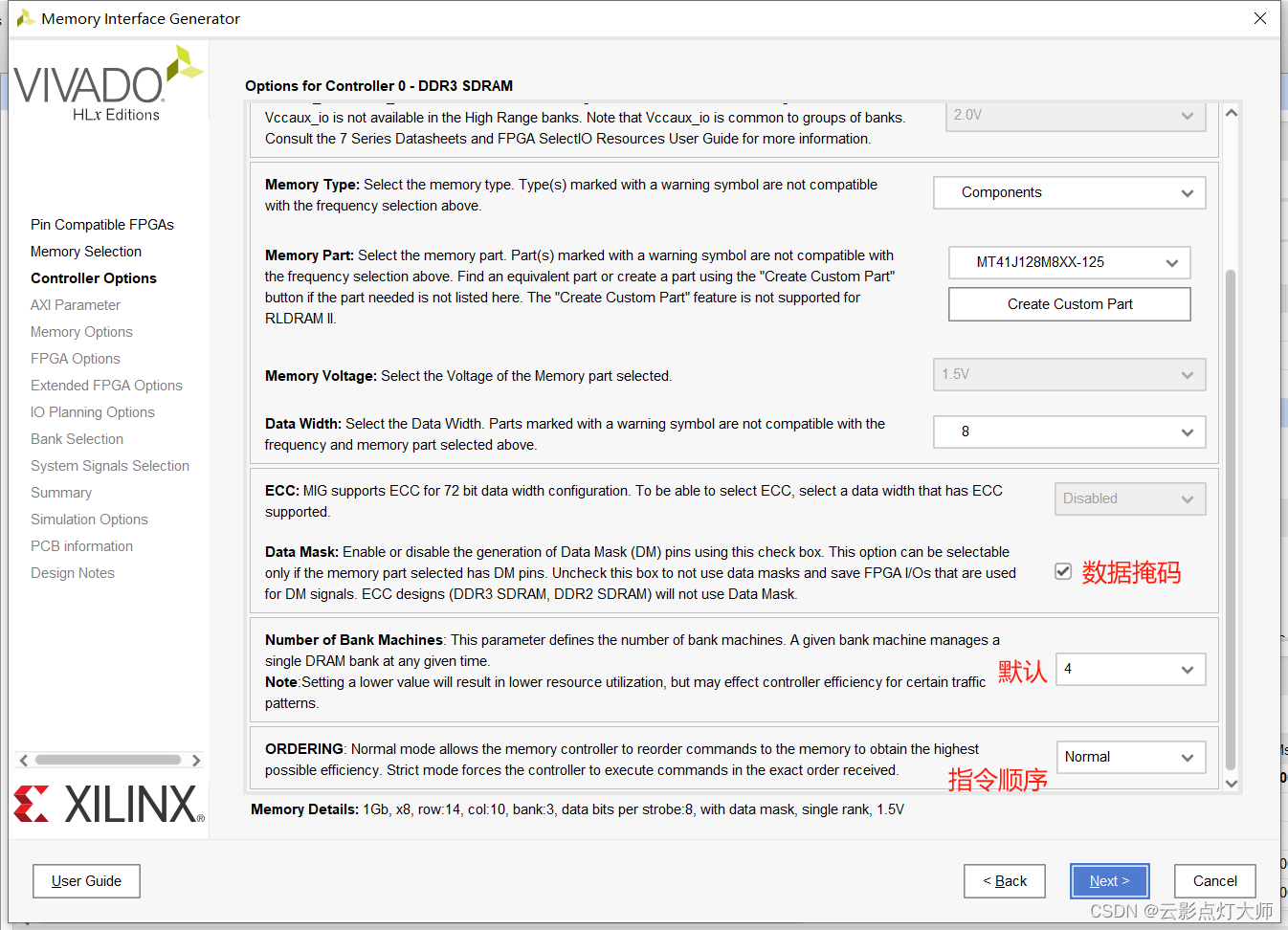
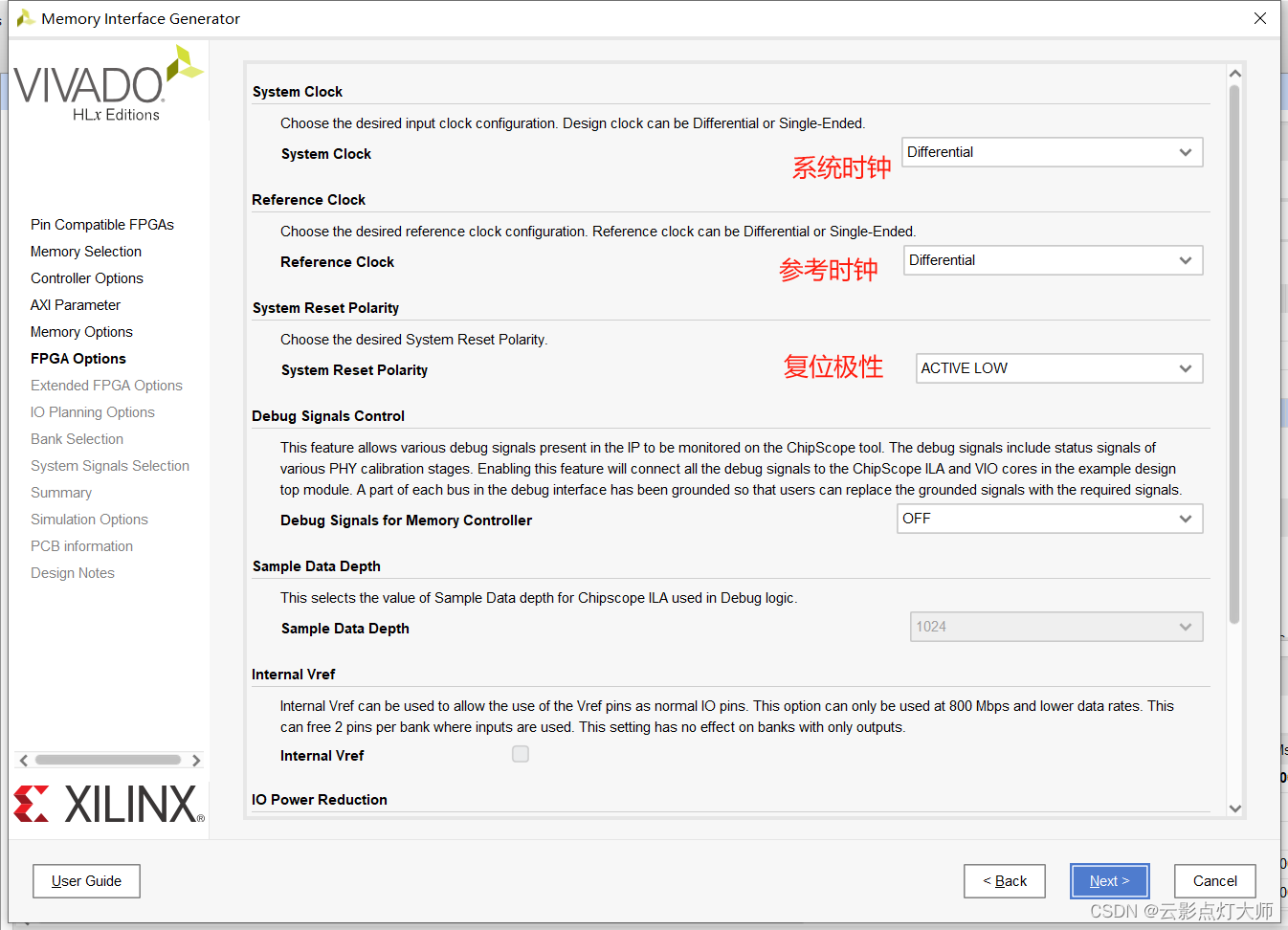
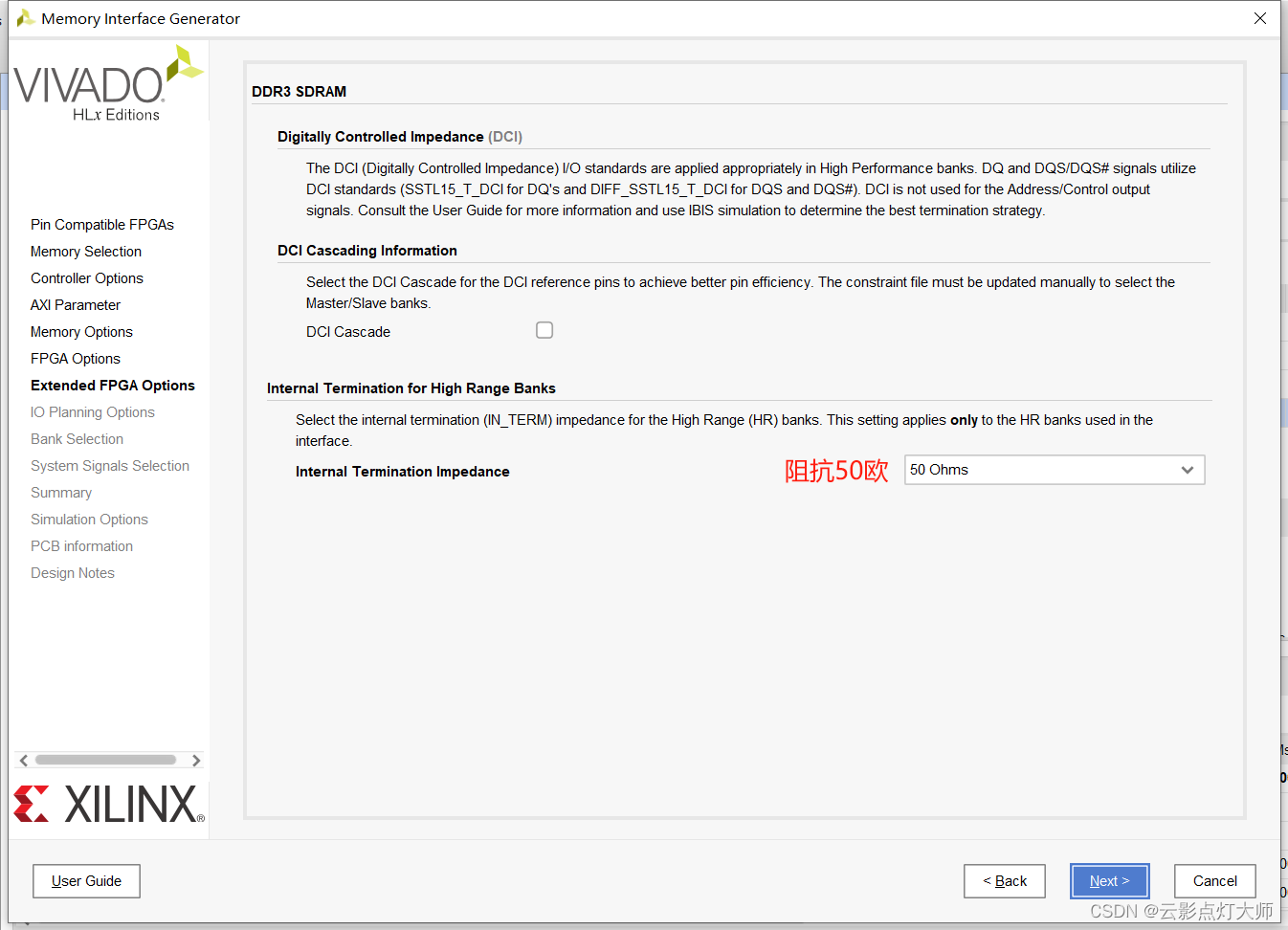
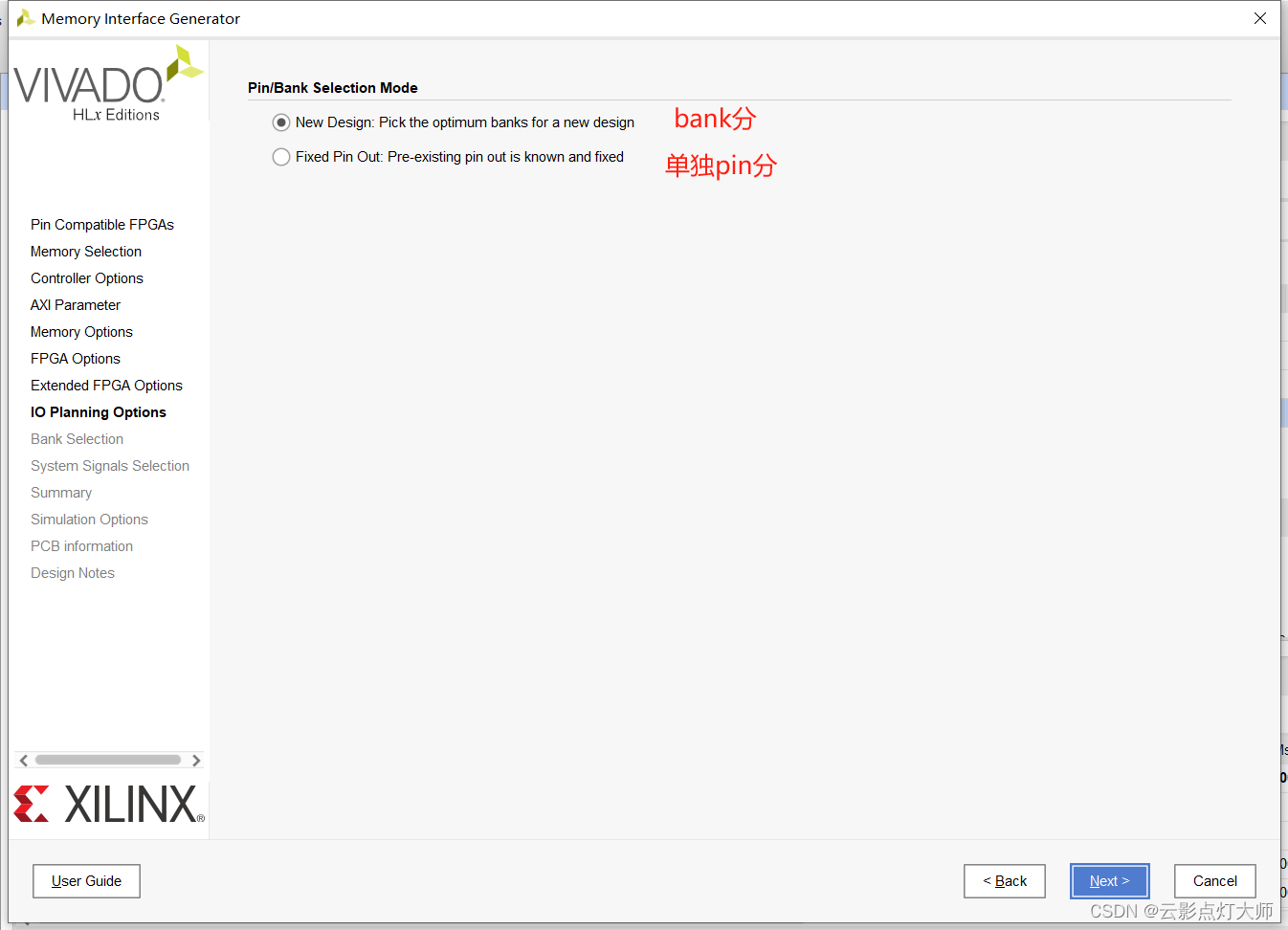
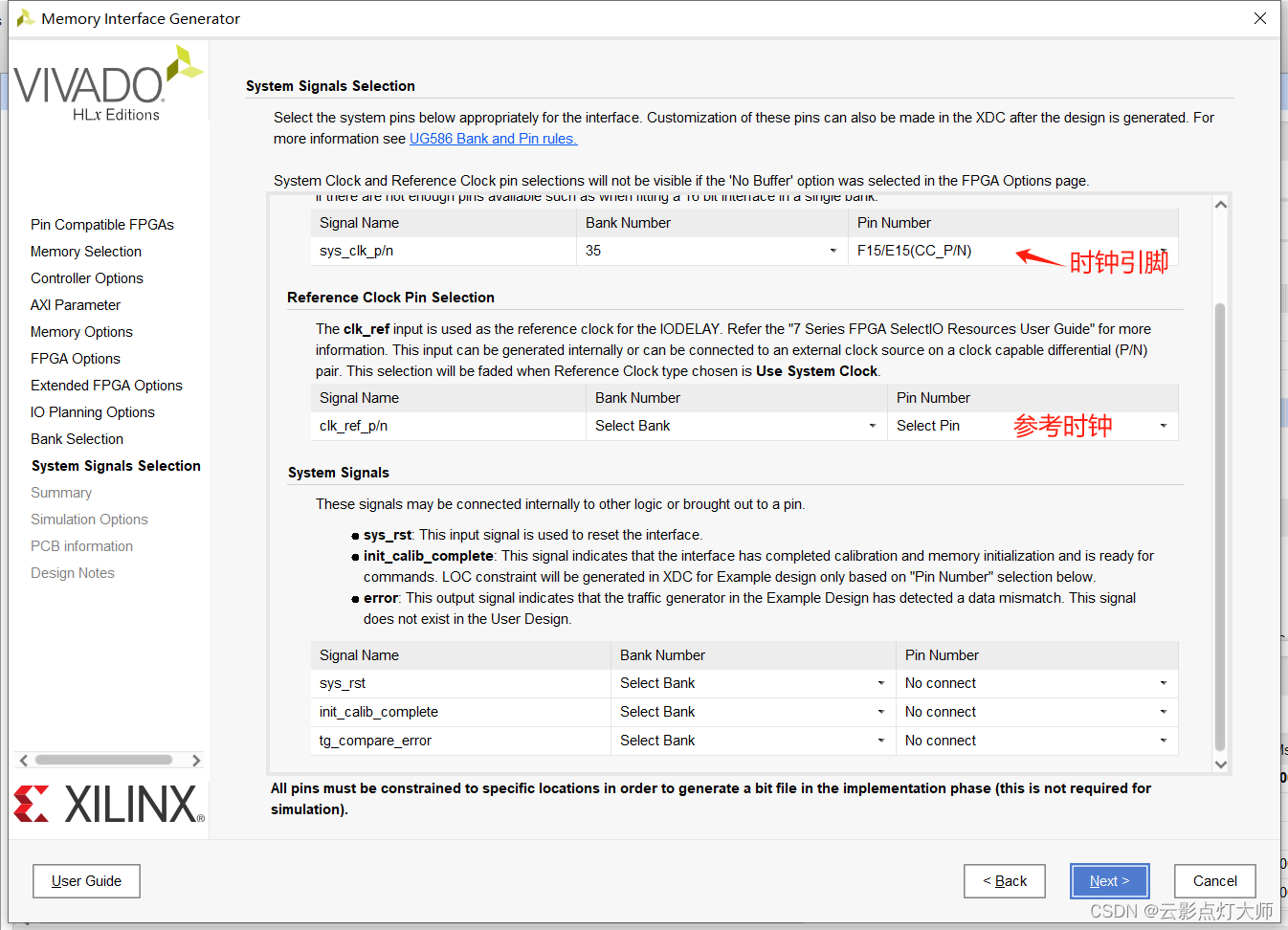
IP核配置
1
2

3
4
5
6
基于MIG核代码
控制MIG核的信号进行读写
module MIG_APP_Drive(
input i_ui_clk ,
input i_ui_rst ,
input init_calib_complete ,
output [28:0] app_addr ,
output [2 :0] app_cmd ,
output app_en ,
output [255:0] app_wdf_data ,
output app_wdf_end ,
output app_wdf_wren ,
input [255:0] app_rd_data ,
input app_rd_data_end ,
input app_rd_data_valid ,
input app_rdy ,
input app_wdf_rdy ,
output [31:0] app_wdf_mask ,
input [1 :0] i_operation_cmd ,
input [15:0] i_operation_len ,
input [28:0] i_operation_addr ,
input i_operation_valid ,
output o_operation_ready ,
input [255:0] i_write_data ,
input i_write_last ,
input i_write_valid ,
output [255:0] o_read_data ,
output o_read_valid
);
/***************function**************/
/***************parameter*************/
localparam P_ST_INIT = 0 ,
P_ST_IDLE = 1 ,
P_ST_WAIT = 2 ,
P_ST_WRITE = 3 ,
P_ST_READ = 4 ,
P_ST_READ_WAIT = 5 ;
/***************port******************/
/***************mechine***************/
(* mark_debug = "true" *)reg [7 :0] r_st_current ;
reg [7 :0] r_st_next ;
reg [15:0] r_st_cnt ;
/***************reg*******************/
reg [28:0] ro_app_addr ;
reg [2 :0] ro_app_cmd ;
reg ro_app_en ;
reg ro_app_wdf_wren ;
reg [31:0] ro_app_wdf_mask ;
reg ro_operation_ready ;
reg [255:0] ro_read_data ;
reg ro_read_valid ;
reg [1 :0] ri_operation_cmd ;
reg [15:0] ri_operation_len ;
reg [28:0] ri_operation_addr ;
reg r_op_act ;
reg [15:0] r_write_cnt ;
reg [15:0] r_read_cnt ;
(* mark_debug = "true" *)reg [15:0] r_read_data_cnt ;
reg [7 :0] r_init ;
/***************wire******************/
wire w_op_act ;
wire [255:0] w_write_fifo_dout ;
wire w_write_fifo_empty ;
wire w_write_fifo_full ;
wire w_mig_wvalid ;
wire w_mig_rvalid ;
wire w_write_fifo_rd_en ;
/***************component*************/
FIFO_256X512 FIFO_256X512_U0 (
.clk (i_ui_clk ), // input wire clk
.din (i_write_data ), // input wire [63 : 0] din
.wr_en (i_write_valid ), // input wire wr_en
.rd_en (w_write_fifo_rd_en ), // input wire rd_en
.dout (w_write_fifo_dout ), // output wire [63 : 0] dout
.full (w_write_fifo_full ), // output wire full
.empty (w_write_fifo_empty ) // output wire empty
);
/***************assign****************/
assign app_addr = ro_app_addr ;
assign app_cmd = ro_app_cmd ;
assign app_en = ro_app_en & app_rdy ;
assign app_wdf_data = w_write_fifo_dout ;
assign app_wdf_end = app_wdf_wren ;
assign app_wdf_wren = ro_app_wdf_wren & app_rdy & app_wdf_rdy;
assign app_wdf_mask = ro_app_wdf_mask ;
assign o_operation_ready = ro_operation_ready ;
assign o_read_data = ro_read_data ;
assign o_read_valid = ro_read_valid ;
assign w_op_act = i_operation_valid & o_operation_ready;
assign w_mig_wvalid = app_rdy & app_wdf_rdy & app_en & ro_app_wdf_wren & app_cmd == 0;
assign w_write_fifo_rd_en = w_mig_wvalid ;
assign w_mig_rvalid = app_rdy & app_en & app_cmd == 1;
/***************always****************/
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_st_current <= P_ST_INIT;
else
r_st_current <= r_st_next;
end
always@(*)
begin
case(r_st_current)
P_ST_INIT : r_st_next = &r_init ? P_ST_IDLE : P_ST_INIT;
P_ST_IDLE : r_st_next = r_op_act ?
ri_operation_cmd == 0 ? P_ST_WAIT : P_ST_READ
: P_ST_IDLE ;
P_ST_WAIT : r_st_next = r_st_cnt == 4 ? P_ST_WRITE : P_ST_WAIT ;
P_ST_WRITE : r_st_next = r_write_cnt == ri_operation_len - 1 & w_mig_wvalid ? P_ST_IDLE : P_ST_WRITE ;
P_ST_READ : r_st_next = r_read_cnt == ri_operation_len - 2 & w_mig_rvalid ? P_ST_READ_WAIT: P_ST_READ ;
P_ST_READ_WAIT : r_st_next = r_read_data_cnt >= ri_operation_len - 2 & app_rd_data_valid ? P_ST_IDLE : P_ST_READ_WAIT ;
default : r_st_next = P_ST_INIT;
endcase
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_init <= 'd0;
else
r_init <= {r_init[6 :0],init_calib_complete};
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_st_cnt <= 'd0;
else if(r_st_current != r_st_next)
r_st_cnt <= 'd0;
else
r_st_cnt <= r_st_cnt + 1;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst) begin
ri_operation_cmd <= 'd0;
ri_operation_len <= 'd0;
ri_operation_addr <= 'd0;
end else if(w_op_act) begin
ri_operation_cmd <= i_operation_cmd ;
ri_operation_len <= i_operation_len ;
ri_operation_addr <= i_operation_addr;
end else begin
ri_operation_cmd <= ri_operation_cmd ;
ri_operation_len <= ri_operation_len ;
ri_operation_addr <= ri_operation_addr;
end
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_op_act <= 'd0;
else
r_op_act <= w_op_act;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst) begin
ro_app_cmd <= 'd0;
ro_app_en <= 'd0;
end else if(r_st_current == P_ST_WRITE) begin
ro_app_cmd <= 'd0;
ro_app_en <= 'd1;
end else if(r_st_current == P_ST_READ) begin
ro_app_cmd <= 'd1;
ro_app_en <= 'd1;
end else begin
ro_app_cmd <= 'd0;
ro_app_en <= 'd0;
end
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
ro_app_addr <= 'd0;
else if(w_op_act)
ro_app_addr <= i_operation_addr;
else if(w_mig_wvalid)
ro_app_addr <= ro_app_addr + 8 ;
else if(w_mig_rvalid)
ro_app_addr <= ro_app_addr + 8 ;
else
ro_app_addr <= ro_app_addr;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
ro_app_wdf_mask <= 'd0;
else
ro_app_wdf_mask <= 'd0;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
ro_app_wdf_wren <= 'd0;
else if(r_st_current == P_ST_WRITE)
ro_app_wdf_wren <= 'd1;
else
ro_app_wdf_wren <= 'd0;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst) begin
ro_read_data <= 'd0;
ro_read_valid <= 'd0;
end else begin
ro_read_data <= app_rd_data;
ro_read_valid <= app_rd_data_valid;
end
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
ro_operation_ready <= 'd0;
else if(w_op_act)
ro_operation_ready <= 'd0;
else if(r_st_next == P_ST_IDLE)
ro_operation_ready <= 'd1;
else
ro_operation_ready <= ro_operation_ready;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_write_cnt <= 'd0;
else if(r_st_current == P_ST_IDLE)
r_write_cnt <= 'd0;
else if(w_mig_wvalid)
r_write_cnt <= r_write_cnt + 1;
else
r_write_cnt <= r_write_cnt;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_read_cnt <= 'd0;
else if(r_st_current == P_ST_IDLE)
r_read_cnt <= 'd0;
else if(w_mig_rvalid)
r_read_cnt <= r_read_cnt + 1;
else
r_read_cnt <= r_read_cnt;
end
always@(posedge i_ui_clk,posedge i_ui_rst)
begin
if(i_ui_rst)
r_read_data_cnt <= 'd0;
else if(r_st_current == P_ST_IDLE)
r_read_data_cnt <= 'd0;
else if(app_rd_data_valid)
r_read_data_cnt <= r_read_data_cnt + 1;
else
r_read_data_cnt <= r_read_data_cnt;
end
endmodule
示列
DDR3_MIG u_DDR3_MIG (
// Memory interface ports
.ddr3_addr (ddr3_addr ),
.ddr3_ba (ddr3_ba ),
.ddr3_cas_n (ddr3_cas_n ),
.ddr3_ck_n (ddr3_ck_n ),
.ddr3_ck_p (ddr3_ck_p ),
.ddr3_cke (ddr3_cke ),
.ddr3_ras_n (ddr3_ras_n ),
.ddr3_reset_n (ddr3_reset_n ),
.ddr3_we_n (ddr3_we_n ),
.ddr3_dq (ddr3_dq ),
.ddr3_dqs_n (ddr3_dqs_n ),
.ddr3_dqs_p (ddr3_dqs_p ),
.ddr3_cs_n (ddr3_cs_n ),
.ddr3_dm (ddr3_dm ),
.ddr3_odt (ddr3_odt ),
// Application interface ports
.init_calib_complete (w_init_calib_complete ),
.app_addr (w_app_addr ),
.app_cmd (w_app_cmd ),
.app_en (w_app_en ),
.app_wdf_data (w_app_wdf_data ),
.app_wdf_end (w_app_wdf_end ),
.app_wdf_wren (w_app_wdf_wren ),
.app_rd_data (w_app_rd_data ),
.app_rd_data_end (w_app_rd_data_end ),
.app_rd_data_valid (w_app_rd_data_valid ),
.app_rdy (w_app_rdy ),
.app_wdf_rdy (w_app_wdf_rdy ),
.app_wdf_mask (w_app_wdf_mask ),
.app_sr_req (0 ),
.app_ref_req (0 ),
.app_zq_req (0 ),
.app_sr_active ( ),
.app_ref_ack ( ),
.app_zq_ack ( ),
.ui_clk (ui_clk ),
.ui_clk_sync_rst (ui_clk_sync_rst ),
// System Clock Ports
.sys_clk_p (i_clk_200m_p ),
.sys_clk_n (i_clk_200m_n ),
.sys_rst (0 )
);
MIG_APP_Drive MIG_APP_Drive_u0(
.i_ui_clk (ui_clk ),
.i_ui_rst (ui_clk_sync_rst ),
.init_calib_complete (w_init_calib_complete ),
.app_addr (w_app_addr ),
.app_cmd (w_app_cmd ),
.app_en (w_app_en ),
.app_wdf_data (w_app_wdf_data ),
.app_wdf_end (w_app_wdf_end ),
.app_wdf_wren (w_app_wdf_wren ),
.app_rd_data (w_app_rd_data ),
.app_rd_data_end (w_app_rd_data_end ),
.app_rd_data_valid (w_app_rd_data_valid ),
.app_rdy (w_app_rdy ),
.app_wdf_rdy (w_app_wdf_rdy ),
.app_wdf_mask (w_app_wdf_mask ),
.i_operation_cmd (w_app_operation_cmd ),
.i_operation_len (w_app_operation_len ),
.i_operation_addr (w_app_operation_addr ),
.i_operation_valid (w_app_operation_valid ),
.o_operation_ready (w_app_operation_ready ),
.i_write_data (w_app_write_data ),
.i_write_last (w_app_write_last ),
.i_write_valid (w_app_write_valid ),
.o_read_data (w_app_read_data ),
.o_read_valid (w_app_read_valid )
);
基于AXI接口的DDR3
module AXI_Master_Drive(
input i_clk ,
input i_rst ,
(* mark_debug = "true" *) input i_init_calib_complete ,
output [3 :0] m_axi_awid ,
output [29:0] m_axi_awaddr ,
output [7 :0] m_axi_awlen ,
output [2 :0] m_axi_awsize ,
output [1 :0] m_axi_awburst ,
output [0 :0] m_axi_awlock ,
output [3 :0] m_axi_awcache ,
output [2 :0] m_axi_awprot ,
output [3 :0] m_axi_awqos ,
output m_axi_awvalid ,
(* mark_debug = "true" *) input m_axi_awready ,
output [255:0] m_axi_wdata ,
output [31:0] m_axi_wstrb ,
output m_axi_wlast ,
output m_axi_wvalid ,
(* mark_debug = "true" *) input m_axi_wready ,
input [3 :0] m_axi_bid ,
input [1 :0] m_axi_bresp ,
(* mark_debug = "true" *) input m_axi_bvalid ,
output m_axi_bready ,
output [3 :0] m_axi_arid ,
output [29:0] m_axi_araddr ,
output [7 :0] m_axi_arlen ,
output [2 :0] m_axi_arsize ,
output [1 :0] m_axi_arburst ,
output [0 :0] m_axi_arlock ,
output [3 :0] m_axi_arcache ,
output [2 :0] m_axi_arprot ,
output [3 :0] m_axi_arqos ,
output m_axi_arvalid ,
(* mark_debug = "true" *) input m_axi_arready ,
input [3 :0] m_axi_rid ,
input [255:0] m_axi_rdata ,
input [1 :0] m_axi_rresp ,
input m_axi_rlast ,
input m_axi_rvalid ,
output m_axi_rready
);
/***************function**************/
/***************parameter*************/
localparam P_ST_INIT = 0 ,
P_ST_IDLE = 1 ,
P_ST_WRITE = 2 ,
P_ST_READ = 3 ;
localparam P_LEN = 16 ;
/***************port******************/
/***************mechine***************/
(* mark_debug = "true" *)reg [7 :0] r_st_current ;
reg [7 :0] r_st_next ;
reg [15:0] r_st_cnt ;
/***************reg*******************/
reg [3 :0] ro_m_axi_awid ;
(* mark_debug = "true" *)reg [29:0] ro_m_axi_awaddr ;
(* mark_debug = "true" *)reg [7 :0] ro_m_axi_awlen ;
reg [2 :0] ro_m_axi_awsize ;
reg [1 :0] ro_m_axi_awburst ;
reg [0 :0] ro_m_axi_awlock ;
reg [3 :0] ro_m_axi_awcache ;
reg [2 :0] ro_m_axi_awprot ;
reg [3 :0] ro_m_axi_awqos ;
(* mark_debug = "true" *)reg ro_m_axi_awvalid ;
(* mark_debug = "true" *)reg [255:0] ro_m_axi_wdata ;
reg [31:0] ro_m_axi_wstrb ;
(* mark_debug = "true" *)reg ro_m_axi_wlast ;
(* mark_debug = "true" *)reg ro_m_axi_wvalid ;
(* mark_debug = "true" *)reg ro_m_axi_bready ;
reg [3 :0] ro_m_axi_arid ;
(* mark_debug = "true" *)reg [29:0] ro_m_axi_araddr ;
(* mark_debug = "true" *)reg [7 :0] ro_m_axi_arlen ;
reg [2 :0] ro_m_axi_arsize ;
reg [1 :0] ro_m_axi_arburst ;
reg [0 :0] ro_m_axi_arlock ;
reg [3 :0] ro_m_axi_arcache ;
reg [2 :0] ro_m_axi_arprot ;
reg [3 :0] ro_m_axi_arqos ;
(* mark_debug = "true" *)reg ro_m_axi_arvalid ;
(* mark_debug = "true" *)reg ro_m_axi_rready ;
reg [3 :0] ri_m_axi_rid ;
(* mark_debug = "true" *)reg [255:0] ri_m_axi_rdata ;
reg [1 :0] ri_m_axi_rresp ;
(* mark_debug = "true" *)reg ri_m_axi_rlast ;
(* mark_debug = "true" *)reg ri_m_axi_rvalid ;
reg [15:0] r_read_cnt;
/***************wire******************/
wire w_aw_act ;
wire w_w_act ;
wire w_br_act ;
wire w_ar_act ;
wire w_r_act ;
/***************component*************/
/***************assign****************/
assign m_axi_awid = ro_m_axi_awid ;
assign m_axi_awaddr = ro_m_axi_awaddr ;
assign m_axi_awlen = ro_m_axi_awlen ;
assign m_axi_awsize = ro_m_axi_awsize ;
assign m_axi_awburst = ro_m_axi_awburst ;
assign m_axi_awlock = ro_m_axi_awlock ;
assign m_axi_awcache = ro_m_axi_awcache ;
assign m_axi_awprot = ro_m_axi_awprot ;
assign m_axi_awqos = ro_m_axi_awqos ;
assign m_axi_awvalid = ro_m_axi_awvalid ;
assign m_axi_wdata = ro_m_axi_wdata ;
assign m_axi_wstrb = ro_m_axi_wstrb ;
assign m_axi_wlast = ro_m_axi_wlast ;
assign m_axi_wvalid = ro_m_axi_wvalid ;
assign m_axi_bready = ro_m_axi_bready ;
assign m_axi_arid = ro_m_axi_arid ;
assign m_axi_araddr = ro_m_axi_araddr ;
assign m_axi_arlen = ro_m_axi_arlen ;
assign m_axi_arsize = ro_m_axi_arsize ;
assign m_axi_arburst = ro_m_axi_arburst ;
assign m_axi_arlock = ro_m_axi_arlock ;
assign m_axi_arcache = ro_m_axi_arcache ;
assign m_axi_arprot = ro_m_axi_arprot ;
assign m_axi_arqos = ro_m_axi_arqos ;
assign m_axi_arvalid = ro_m_axi_arvalid ;
assign m_axi_rready = ro_m_axi_rready ;
assign w_aw_act = m_axi_awvalid & m_axi_awready ;//写地址激活信号
assign w_w_act = m_axi_wvalid & m_axi_wready ;//写数据激活信号
assign w_br_act = m_axi_bvalid & m_axi_bready ;//响应激活信号
assign w_ar_act = m_axi_arvalid & m_axi_arready ;//读地址激活信号
assign w_r_act = m_axi_rvalid & m_axi_rready ;//读数据信号
/***************always****************/
//第一段状态机
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
r_st_current <= P_ST_IDLE;
else
r_st_current <= r_st_next;
end
//第二段
always@(*)
begin
case(r_st_current)
P_ST_INIT : r_st_next <= i_init_calib_complete ? P_ST_IDLE : P_ST_INIT;
P_ST_IDLE : r_st_next <= P_ST_WRITE;
P_ST_WRITE : r_st_next <= w_br_act ? P_ST_READ : P_ST_WRITE;
P_ST_READ : r_st_next <= r_read_cnt == P_LEN - 1 && w_r_act ? P_ST_IDLE : P_ST_READ;
default : r_st_next <= P_ST_IDLE;
endcase
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
r_st_cnt <= 'd0;
else if(r_st_current != r_st_next)
r_st_cnt <= 'd0;
else
r_st_cnt <= r_st_cnt + 1;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst) begin
ro_m_axi_awid <= 'd0;
ro_m_axi_awaddr <= 'd0;
ro_m_axi_awlen <= 'd0;
ro_m_axi_awsize <= 'd0;
ro_m_axi_awburst <= 'd0;
ro_m_axi_awlock <= 'd0;
ro_m_axi_awcache <= 'd0;
ro_m_axi_awprot <= 'd0;
ro_m_axi_awqos <= 'd0;
ro_m_axi_awvalid <= 'd0;
end else if(w_aw_act) begin
ro_m_axi_awid <= 'd0;
ro_m_axi_awaddr <= 'd0;
ro_m_axi_awlen <= 'd0;
ro_m_axi_awsize <= 'd0;
ro_m_axi_awburst <= 'd0;
ro_m_axi_awlock <= 'd0;
ro_m_axi_awcache <= 'd0;
ro_m_axi_awprot <= 'd0;
ro_m_axi_awqos <= 'd0;
ro_m_axi_awvalid <= 'd0;
end else if(r_st_current == P_ST_WRITE && r_st_cnt == 0) begin
ro_m_axi_awid <= 'd0;
ro_m_axi_awaddr <= 'd0;
ro_m_axi_awlen <= P_LEN - 1;
ro_m_axi_awsize <= 3'b101;//32byte
ro_m_axi_awburst <= 'd1;//突发模式
ro_m_axi_awlock <= 'd0;
ro_m_axi_awcache <= 4'b0010;//无缓存
ro_m_axi_awprot <= 'd0;
ro_m_axi_awqos <= 'd0;
ro_m_axi_awvalid <= 'd1;//有效拉高
end else begin
ro_m_axi_awid <= ro_m_axi_awid ;
ro_m_axi_awaddr <= ro_m_axi_awaddr ;
ro_m_axi_awlen <= ro_m_axi_awlen ;
ro_m_axi_awsize <= ro_m_axi_awsize ;
ro_m_axi_awburst <= ro_m_axi_awburst;
ro_m_axi_awlock <= ro_m_axi_awlock ;
ro_m_axi_awcache <= ro_m_axi_awcache;
ro_m_axi_awprot <= ro_m_axi_awprot ;
ro_m_axi_awqos <= ro_m_axi_awqos ;
ro_m_axi_awvalid <= ro_m_axi_awvalid;
end
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
ro_m_axi_wdata <= 'd0;
else if(ro_m_axi_wdata == P_LEN - 1 && w_w_act)
ro_m_axi_wdata <= 'd0;
else if(w_w_act)
ro_m_axi_wdata <= ro_m_axi_wdata + 1;
else
ro_m_axi_wdata <= ro_m_axi_wdata;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
ro_m_axi_wvalid <= 'd0;
else if(ro_m_axi_wdata == P_LEN - 1 && w_w_act)
ro_m_axi_wvalid <= 'd0;
else if(w_aw_act)
ro_m_axi_wvalid <= 'd1;
else
ro_m_axi_wvalid <= ro_m_axi_wvalid;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
ro_m_axi_wlast <= 'd0;
else if(ro_m_axi_wdata == P_LEN - 1 && w_w_act)
ro_m_axi_wlast <= 'd0;
else if(ro_m_axi_wdata == P_LEN - 2)
ro_m_axi_wlast <= 'd1;
else
ro_m_axi_wlast <= ro_m_axi_wlast;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
ro_m_axi_wstrb <= 32'hffffffff;
else
ro_m_axi_wstrb <= 32'hffffffff;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
ro_m_axi_bready <= 'd0;
else if(w_br_act)
ro_m_axi_bready <= 'd0;
else if(ro_m_axi_wlast)
ro_m_axi_bready <= 'd1;
else
ro_m_axi_bready <= ro_m_axi_bready;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst) begin
ro_m_axi_arid <= 'd0;
ro_m_axi_araddr <= 'd0;
ro_m_axi_arlen <= 'd0;
ro_m_axi_arsize <= 'd0;
ro_m_axi_arburst <= 'd0;
ro_m_axi_arlock <= 'd0;
ro_m_axi_arcache <= 'd0;
ro_m_axi_arprot <= 'd0;
ro_m_axi_arqos <= 'd0;
ro_m_axi_arvalid <= 'd0;
end else if(w_ar_act) begin
ro_m_axi_arid <= 'd0;
ro_m_axi_araddr <= 'd0;
ro_m_axi_arlen <= 'd0;
ro_m_axi_arsize <= 'd0;
ro_m_axi_arburst <= 'd0;
ro_m_axi_arlock <= 'd0;
ro_m_axi_arcache <= 'd0;
ro_m_axi_arprot <= 'd0;
ro_m_axi_arqos <= 'd0;
ro_m_axi_arvalid <= 'd0;
end else if(r_st_current == P_ST_READ && r_st_cnt == 0) begin
ro_m_axi_arid <= 'd0;
ro_m_axi_araddr <= 'd0;
ro_m_axi_arlen <= P_LEN - 1;
ro_m_axi_arsize <= 3'b101;
ro_m_axi_arburst <= 'd1;
ro_m_axi_arlock <= 'd0;
ro_m_axi_arcache <= 4'b0010;
ro_m_axi_arprot <= 'd0;
ro_m_axi_arqos <= 'd0;
ro_m_axi_arvalid <= 'd1;
end else begin
ro_m_axi_arid <= ro_m_axi_arid ;
ro_m_axi_araddr <= ro_m_axi_araddr ;
ro_m_axi_arlen <= ro_m_axi_arlen ;
ro_m_axi_arsize <= ro_m_axi_arsize ;
ro_m_axi_arburst <= ro_m_axi_arburst;
ro_m_axi_arlock <= ro_m_axi_arlock ;
ro_m_axi_arcache <= ro_m_axi_arcache;
ro_m_axi_arprot <= ro_m_axi_arprot ;
ro_m_axi_arqos <= ro_m_axi_arqos ;
ro_m_axi_arvalid <= ro_m_axi_arvalid;
end
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
ro_m_axi_rready <= 'd0;
else if(r_read_cnt == P_LEN - 1 && w_r_act)
ro_m_axi_rready <= 'd0;
else if(w_ar_act)
ro_m_axi_rready <= 'd1;
else
ro_m_axi_rready <= ro_m_axi_rready;
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst) begin
ri_m_axi_rid <= 'd0;
ri_m_axi_rdata <= 'd0;
ri_m_axi_rresp <= 'd0;
ri_m_axi_rlast <= 'd0;
ri_m_axi_rvalid <= 'd0;
end else begin
ri_m_axi_rid <= m_axi_rid ;
ri_m_axi_rdata <= m_axi_rdata ;
ri_m_axi_rresp <= m_axi_rresp ;
ri_m_axi_rlast <= m_axi_rlast ;
ri_m_axi_rvalid <= m_axi_rvalid;
end
end
always@(posedge i_clk,posedge i_rst)
begin
if(i_rst)
r_read_cnt <= 'd0;
else if(r_read_cnt == P_LEN - 1 && w_r_act)
r_read_cnt <= 'd0;
else if(w_r_act)
r_read_cnt <= r_read_cnt + 1;
else
r_read_cnt <= r_read_cnt;
end
endmodule
![[运维] 可视化爬虫易采集-EasySpider(笔记)](https://img-blog.csdnimg.cn/direct/7a96729ffcba4adea372a7c9c25f090e.png)
![[SAP ABAP] SE11查询数据库表中的数据](https://img-blog.csdnimg.cn/direct/740f6d8e5f90499ca3b38fcef9a9c41f.png)