stackBlur介绍
stackBlur 最近才加入到OpenCV中,将在下一个Relase版本(4.7)中出现。C++用户可以尝试从源码编译OpenCV体验一下。Python 用户可以尝试用pip安装rolling版本的OpenCV:
pip install opencv-python-rolling==4.6.0.20221015stackBlur是高斯模糊的近似,同样支持水平和垂直不对称的滤波。
stackAPI
C++API
Mat img_src, img_dst;
Size kernel_size(13, 9);
stackBlur(img_src, img_dst, kernel_size);Python API
img_dst = cv2.stackBlur(img_src, (13, 9))为什么StackBlur的API中s小写?OpenCV中对API有严格控制,以作者名称开头的API可以大写(如Sobel、GaussianBlur),除此之外都小写字母开头。
直接上stackBlur的使用建议和最后的实验结果:
建议当kernel size > 11时,用stackBlur替换高斯模糊;当kernel size特别大时,OpenCV的所有模糊滤波器中只推荐stackBlur。
实验结果如下:

测试环境:Mac M1,8核,image size [1920 x 2048], 数据类型:CV_8U3C。
测试方法:跑一千次,选取最小作为耗时,测试脚本在这里。
结论:stackBlur不会随着kernel size增加而增加耗时。
原理介绍
如果你想知道关于加速的更多细节,请看下面的完整版(1万字预警):
Stackblur的坑是2021年初老瓦给我挖的。当时我找他,说我想从事OpenCV开发,有啥事情可以干的吗?老瓦说可以尝试增加一个新滤波器stackblur。当时做了有半个月,终于把代码在OpenCV上调通并且能产生正确模糊的结果,但是卡在了速度优化上。最近在优化OpenCV的DNN模块,也学会了一些并行加速的技巧又花了两周时间终于把坑填上了。
本文介绍最近新加入OpenCV的模糊算法Stackblur,Stackblur是一种高斯模糊的快速近似,由Mario Klingemann发明。其计算耗时不会随着kernel size增大而增加,专为大kernel size的模糊滤波场景量身定制。本文从新加入OpenCV的cv::stackBlurAPI开始引入,首先介绍Stackblur和常用的高斯模糊及盒子模糊(Boxblur)的区别,然后,介绍如何将StackBlur加速到极致,最后是一些性能测试及结果分析。
如果你也想让你的滤波器跑的像OpenCV里的滤波器一样快,本文也许能给你一些启发。
大佬请直接上眼PR
滤波计算

具体计算其实和DNN的卷机层类似,这里盗用一下卷机计算过程做展示,其中左侧是原图像,中间是kernel,右侧是输出:

滤波核
不同模糊滤波算法之前区别就在于滤波核的不同,下面是kernel size为3x3对应的值。

三种滤波器在kernel size为3x3时的滤波核
可以发现,3x3情况下,高斯滤波核和Stackblur的值是一样的,这是为什么呢?
如果想知道高斯滤波核怎么产生,请参考:Jargon:OpenCV 学习:8 高斯滤波GaussianBlur
读完下节将告诉你为什么StackBlur 3x3滤波核是这个样子。在此之前,我们先了解一下一个重要的问题:对比BoxBlur和高斯模糊,Stackblur有什么优势?
首先,我们仔细研究一下BoxBlur有哪些不足,下图展示了boxblur从小kernel到大kernel的图像模糊滤波结果,可以发现,当Radius=20时(这里radius和kernel size的换算:kernel size = 2 * radius + 1),可以明显感觉输出图像有方格感。

再来看看高斯模糊。下图是高斯的核函数的三维图像。中心高,四周低,每个输出的像素点受到滤波核中心值的影响要比四周的影响大,这能保证高斯模糊不会像Boxblur一样出现方格感。在大kernel size情况下,高斯模糊输出的图像质量没问题。但是高斯模糊算法最大的问题在于速度,高斯模糊的耗时会随着kernel size的增大而增大,对于StackBlur和BoxBlur,其并不会随着kernel size增大而耗时增加。这是为什么?见加速部分。

高斯核函数
StackBlur算法
这里直接引入StakBlur算法的原始论文,作者只用了一页纸就说明白了。论文里仅描述了1维的StackBlur算法,2维情况是分别在水平和垂直方向做1维Stackblur即可。

包浆图片来源:https://underdestruction.com/wordpress/wp-content/uploads/2016/02/StackBlur01.png
这一页纸中,从上到下,作者将StackBlur算法从初始状态到像素计算过程展示的很清楚了。其中展示的是kernel size大小为5,或者radius = 2的1维stackblur计算过程(kernel size = radius * 2 + 1)。和之前滤波核的计算不同,这里是用Queue和Stack来计算。其中,Queue的长度等于(kernel size/2 +1)*2。不同kernel size对应的Stack形状如下图所示,后续以此类推:

不同kernel size的Stackblur中Stack所对应的形状
一旦kernel size确定之后,stack的形状也就确定了。
其中Queue分为前后两个部分,为了方便理解,我将Queue前后切开分别叫做StackOut和StackIn。
Step0: 初始状态。填充第一个像素值到StackOut、StackIn和Stack中。
Step1: 计算输出像素值。val = Sum(Stack)/Stack_NUM.
Step2: 更新StackOut、StackIn和Stack,更新方法如下:
Stack = Stack - StackOut + StackIn;
StackIn和StackOut向右移动一格,类似于滑动窗口。
Step3: 重复Step1,直到一行结束。其中,Stack_NUM是由Stack中方块的数量确定,如kernel size为5时,Stack_NUM为1 + 3 + 5 = 9。
这里举个例子:当Stackblur kernel size = 5时的1维stackblur的计算方法,此时是计算Pixel 3的值。
此时Sum(Stack) = 1 + 2 * 2 + 3 * 3 + 4 * 2 + 5 = 27。
然后,算出Pixel3 = Sum(Stack)/9 = 3 。

计算Pixel 3时状态
接着更新Stack、StackOut和StackIn。
接下来我们计算Pixel 4的值。
接下来计算Pixel 4的值:
此时Sum(Stack) = 2 * 1 + 3 * 2 + 4 * 3 + 5 * 2 + 6 * 1 = 36
然后,算出Pixel 4 = Sum(Stack)/9 = 4。
接着更新。。。

计算Pixel 4时的状态
从Pixel 3和4的计算方式,我们可以得知,Sum(Stack)/9其实等价于滤波核为[1, 2, 3, 2, 1] * 1/9的1维滤波计算。
同理可知,在StackBlur的kernel size为3时,对应的1维kernel 为 [1, 2, 1] * 1/4,扩展到2维之后,见下图:

kernel size为3x3的StackBlur滤波核
再进一步,我们知道boxBlur和stackBlur类似,boxBlur应该可以用Stack、StackOut和StackIn这种模式计算,确实,我们只需要将上面两个图简化一下就是boxBlur的模式。
将Stack、StackOut和StackIn改写成Box、BoxOut和BoxIn,将Stack改成Box的格式,计算pixel 3时如下图:

boxBlur计算pixel 3时状态
这里的Box、BoxOut和BoxIn的更新方式和上面如出一辙,这里就不再赘述,下面是计算pixel 4时的状态:

boxBlur计算pixel 4时状态
而高斯模糊是无法改写成这种模式的。
到此,我们可以回答之前埋下的坑:高斯模糊的耗时会随着kernel size的增大而增大,对于StackBlur和BoxBlur,其并不会随着kernel size增大而耗时增加。这是为什么?
举个例子,对比1维滤波核的kernel size = 3和kernel size=101时所需要的计算量,对比Stack、StackOut和StackIn这种模式和普通滤波计算需要消耗的计算量:
Stack、StackOut和StackIn这种模式:每算出一个像素点值都需要更新Stack、StackOut和StackIn外加一个除法,这个计算量不会随着kernel size增加而增加。
而高斯滤波计算只能按照普通滤波计算:kernel size =3 时,需要2次加法、2次乘法和1次除法,而kernel size=101时,则需要101次加法、101次乘法和1次除法。
普通滤波计算:滤波核为[a, b, c] * 1/d时
val[i] = (input[i] * a + input[i+1] * b + input[i+2] * c)/dStackblur:加速优化
对于2维图像上的Stackblur算法,可以将其看成:先在水平方向进行1维stackblur算法;然后,在垂直方向进行1维stackblur算法。由于两个方向的优化技巧不一样,接下来的Stackblur优化也分为两部分。除此之外,还有一些其他有效的trick,经过一系列优化,stackBlur甚至比boxBlur还快。
优化水平方向的Stackblur
多线程并行加速:水平方向上计算时,每行都不相关,可以在行方向上并行加速,不多赘述。
在之前的StackBlur算法介绍部分我们知道,StackBlur算法中,有三个东西需要维护,Stack、StackIn和StackOut。其实严谨一点的表示是这样的:用Sum_Stack表示Sum(Stack)求和之后的值,Sum_StackIn和Sum_StackOut同理。更新流程变成下面过程:
Step0: 初始状态。计算初始的Sum_StackOut、Sum_StackIn和Sum_Stack。
Step1: 计算输出像素值。val = Sum_Stack/Stack_NUM.
Step2: 更新Sum_StackOut、Sum_StackIn和Sum_Stack,更新方法如下:
Sum_Stack = Sum_Stack - Sum_StackOut + Sum_StackIn;
StackIn和StackOut向右移动一格,类似于滑动窗口:
Sum_StackOut = Sum_StackOut + pixel_in0 - pixel_out0
Sum_StackIn = Sum_StackIn + pixel_in1 - pixel_out1
Step3: 重复Step1,直到一行结束。其中,pixel_in0, pixel_out0, pixel_in1, pixel_out1是StackOut和StackIn滑动窗口移除和增加的像素值。
此类算法加速思路有一下三点:
- 优化内存
- 减少计算量
- 尝试用SIMD指令加速
对于第一点,每一行的内存都是连续的,没有优化空间。对于第二点,算法比较简单,也没法减少计算量。可以尝试的只有第三点:SIMD指令加速。仔细观察一下式:
Sum_Stack = Sum_Stack - Sum_StackOut + Sum_StackIn乍一看,好像没法用SIMD加速,因为只有算出第N个像素,才能算出第N+1个像素,前后相关性强。
仔细观察Diffs = - Sum_StackOut + Sum_StackIn 部分,如下图:

StackOut和StackIn的diff分析
对于上图,我们可以尝试将Diffs 改写成下列式子:
Diffs = -(1 + 2 + 3) + (4 + 5 + 6)
= (4 - 1) + (5 - 2) + (6 - 3)
= diff0 + diff1 + diff2
其中,diff0 = (4 - 1), diff1 = (5 - 2), diff2 = (6 - 3)我们可以算出所有像素点之间的diff0~diffN的差值, 并保存在一个diff_vector里。其中计算前后差值(diff0和diff1)之间不是前后相关,这个过程就可以用SIMD指令加速了。这里的diff_vector的大小和输入数据一样宽,也算是空间换时间的算法。
优化之后的算法可以表示成:
Step0: 计算diff值保存到diff_vector中。
Step1: 初始状态。计算Sum_StackOut、Sum_StackIn、Sum_Stack和Diffs。
其中Diffs = - Sum_StackOut + Sum_StackIn
Step1: 计算输出像素值。val = Sum_Stack/Stack_NUM.
Step2: 更新Diffs和Sum_Stack,更新方法如下:
Sum_Stack = Sum_Stack + Diffs
Diffs = Diffs - diff_vector[i] + diff_vector[j]
Step3: 重复Step1,直到一行结束。在实际测试中,此trick能提速30%左右。
此方法参考自:https://www.cnblogs.com/imageshop/p/5053013.html
将普通滤波计算划分成StackOut、StackIn和Stack这种模式,并不全都会获得加速。想象一下,当kernel size为3时,也就是滤波为[1, 2, 1] * 1/4时,我们可以按照下普通方式计算出每个像素的值:
val = (input[i] + input[i+1] * 2 + input[i+2])/4并且,此时前后像素的输出是完全无关,也就是所有计算都可以用SIMD指令。
实际测试发现,在水平计算上,仅当(kernel size <= 9)我们按照普通滤波计算,而kernel size > 9的情况,就按照上述的StackOut、StackIn和Stack这种模式计算。9这个数字是我在M1芯片上实际测试对比的结果。
优化垂直方向的Stackblur
多线程策略:垂直方向计算时,不同列的数据是不相关。并行方案如下图所示:

垂直方向计算的多线程策略
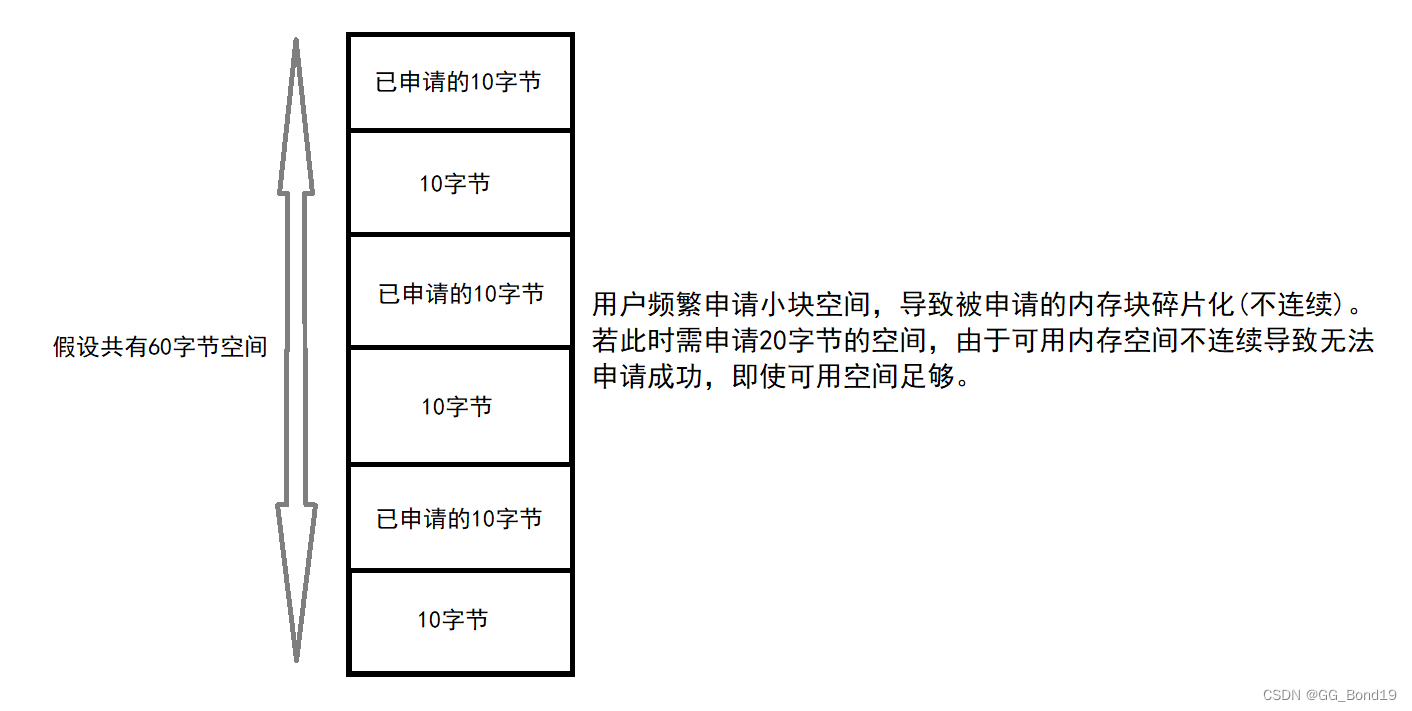
除并行之外,相比于水平计算时,垂直计算的最大问题时内存的不连续。滑动窗口在垂直方向移动,上一个像素点和下一个像素点在内存上是跳跃的,跳跃间隔为图像宽度。如果按照一列一列的计算,将会有巨大的I/O开销,对此,采取空间换时间的策略是非常很有效的,具体策略如下:
Sum_Stack不在是一个标量,而是一个vector,vector的长度和为图像的宽度(如果有并行,则为当前thread处理部分的宽度。)同样,Sum_StackOut和Sum_StackIn以及Queue都需要类似的处理,每次滑动都可以算出一行。此处行与行之间不相关,可以放心使用SIMD指令加速。在垂直方向优化中,不需要其他多余的trick,就能让算法跑的飞快。实际测试中,在采取空间换时间的前后,速度差距有几十倍。
StackBlur的计算优化
StackBlur是一种高斯模糊的近似计算,鉴于除法运算是比较耗时的,我们可以近似运算替代。对于数据格式为float,我们可以用乘法代替除法。对于数据格式为int型(OpenCV常用uchar型)可以用乘法和右移运算代替。
如:1/9 可以用 (v * 456) >> 12 替代。100 / 9 = 11.11, (100 * 456)>>12 = 11。实际实现中,可以提前算出radius为0~254的乘法和右移因子,如下所示:
static unsigned short const stackblurMul[255] =
{
512,512,456,512,328,456,335,512,405,328,271,456,388,335,292,512,
454,405,364,328,298,271,496,456,420,388,360,335,312,292,273,512,
482,454,428,405,383,364,345,328,312,298,284,271,259,496,475,456,
437,420,404,388,374,360,347,335,323,312,302,292,282,273,265,512,
497,482,468,454,441,428,417,405,394,383,373,364,354,345,337,328,
320,312,305,298,291,284,278,271,265,259,507,496,485,475,465,456,
446,437,428,420,412,404,396,388,381,374,367,360,354,347,341,335,
329,323,318,312,307,302,297,292,287,282,278,273,269,265,261,512,
505,497,489,482,475,468,461,454,447,441,435,428,422,417,411,405,
399,394,389,383,378,373,368,364,359,354,350,345,341,337,332,328,
324,320,316,312,309,305,301,298,294,291,287,284,281,278,274,271,
268,265,262,259,257,507,501,496,491,485,480,475,470,465,460,456,
451,446,442,437,433,428,424,420,416,412,408,404,400,396,392,388,
385,381,377,374,370,367,363,360,357,354,350,347,344,341,338,335,
332,329,326,323,320,318,315,312,310,307,304,302,299,297,294,292,
289,287,285,282,280,278,275,273,271,269,267,265,263,261,259
};
static unsigned char const stackblurShr[255] =
{
9, 11, 12, 13, 13, 14, 14, 15, 15, 15, 15, 16, 16, 16, 16, 17,
17, 17, 17, 17, 17, 17, 18, 18, 18, 18, 18, 18, 18, 18, 18, 19,
19, 19, 19, 19, 19, 19, 19, 19, 19, 19, 19, 19, 19, 20, 20, 20,
20, 20, 20, 20, 20, 20, 20, 20, 20, 20, 20, 20, 20, 20, 20, 21,
21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 21,
21, 21, 21, 21, 21, 21, 21, 21, 21, 21, 22, 22, 22, 22, 22, 22,
22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22,
22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 22, 23,
23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23,
23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23,
23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23, 23,
23, 23, 23, 23, 23, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24,
24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24,
24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24,
24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24,
24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24, 24
};在我本机M1芯片上,此trick并未有非常明显的速度提升。可能原因:现在的芯片都有FPU单元,float乘法计算会很快。
性能测试:stackBlur vs GaussainBlur vs boxBlur
上面做了这么多trick和优化,实际表现究竟怎么样呢?请看下面实验。
测试环境:Mac M1,8核,image size [1920 x 2048], 数据类型:CV_8U3C。
测试方法:跑一千次,选取最小作为耗时,测试脚本在这里,欢迎大家自行测试,不同设备结果会些许差异。
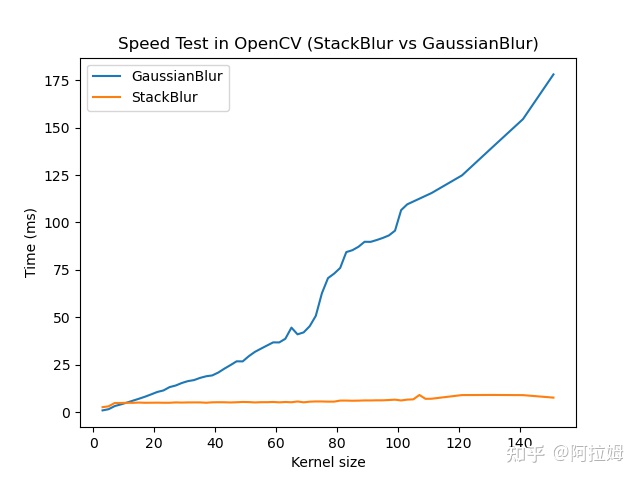
不同kernel size下高斯模糊和StackBlur的耗时对比
图像除了要考虑到数据类型int和float,还要考虑通道数,目前OpenCV常用的通道数为1,3,