文章目录
- 1 摩擦力特性分析
-
- 1.1 预滑动特性及摩擦滞回
- 1.2 非局部记忆效应
- 1.3 临界摩擦力
- 1.4 低速爬行现象
- 1.5 Stribeck 效应
- 1.6 摩擦滞后特性
- 1.7 法向与切向摩擦力的耦合
- 2 摩擦力数学模型
-
- 2.1 静态摩擦模型
- 2.1.1 库伦+粘性摩擦模型
- 2.1.2 Stribeck模型-指数型摩擦模型
- 2.2 动态摩擦模型
1 摩擦力特性分析
摩擦力的大小是多种因素共同作用的结果,例如相接触物体的材质、相对速度、润滑情况以及接触面的几何形状、材料和布局等。由于物体的实际表面并非绝对平滑,表现为摩擦表面一些突出的微小的点相互接触,称为“突点”。Stribeck 等研究人员通过观察摩擦现象,发现从静止开始加速直至达到稳态速度时,如图 2-5 所示,摩擦力在特性曲线中主要包括静摩擦、边界润滑、部分流体润滑和完全流体润滑四个阶段[47]。

- 第一阶段为静摩擦阶段,物体相互接触从而在接触面产生弹性变形—预滑动 位移,随即出现了一种约束力—静摩擦力,与速度无关。
- 第二阶段为边界润滑阶段,因为接触面间相对运动速度极低,所以在接触面间无法建立液体薄膜。研究人员发现摩擦特性曲线的形状、系统低速爬行问题都和边界润滑密切相关。
- 第三阶段为部分流体润滑阶段,物体发生相对运动其接触面间形成液体薄膜,由于法向压力的作用,使得部分润滑液被挤出接触面,所以仍存在固体接触区域,摩擦记忆现象在此阶段较为突出。
- 第四阶段为完全流体润滑阶段,由于接触面间完全形成液体薄膜,不存在固体接触,所以此时摩擦力开始减小,但是粘滞摩擦特性随速度的提高愈发显著,摩擦力随相对运动速度的增大而增大。
1.1 预滑动特性及摩擦滞回
被施加切向力的物体会产生微小的位移,在数百纳米至数十毫米之间,其大小与正压力、摩擦材料、表面形貌等有关,而预滑动摩擦就发生在位移范围内。此时速度几乎为零,但接触面间的关联结由于相互牵扯产生弹性变形,所以存在相对运动的趋势。所以,摩擦力与相对运动速度关系不大,而是与预滑动位移有关。当撤去外力后,位移不能恢复到初始位置,从而形成滞回。
1.2 非局部记忆效应
实验发现,预滑动阶段的摩擦滞回不仅与当前位移有关,而且还取决于之前的位移信息。即系统当前时刻的输出,是当前系统输入和过去时刻系统输入或输出共同作用的结果。
1.3 临界摩擦力
随位移增大,摩擦力也持续增加。直到某一时刻,摩擦从预滑动转为开始宏观滑动,摩擦力在期间有所下降,其最大值为临界摩擦力,与外加作用力的增长速率相关。速度在±5mm/s 之间改变时,摩擦力的变化情况如下图 2-6 所示。

1.4 低速爬行现象
爬行现象分析简图如图 2-7 所示,以速度 v 开始驱动物体 m 时,静摩擦力导
致其仍静止不动,当驱动力超过最大静摩擦力时,物体开始运动,启动瞬间物体加速,弹簧开始减小压缩量。当驱动力降低到与滑动摩擦力相等时,由于物体惯性使得弹簧继续减小压缩量;当弹簧驱动力小于动摩擦力时,物体开始减速。若物体惯性太大则驱动力不能够使物体继续运动从而发生停顿,上述过程重复发生,就导致了系统的爬行现象。

1.5 Stribeck 效应
研究表明,在定常速润滑条件下,当摩擦进入宏观滑动阶段时,随速度的不断增大,摩擦力先下降到一个极小值,然后随速度增大而增大。摩擦力随运动物体速度变化呈现出来的变化规律,即为 Stribeck 效应。

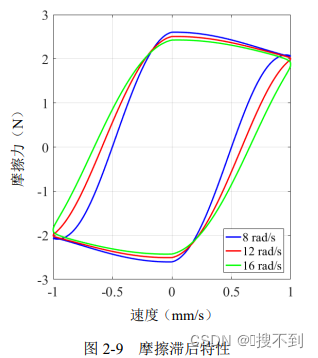
1.6 摩擦滞后特性
实验中发现,摩擦力在系统加速时要比减速时略大一些,其依赖于加速度的符号及其数值上的变化,说明摩擦力大小不仅与系统速度有关,还与加速度密切相关。不同速度和加速度下的摩擦力变化情况如图 2-9 所示,在系统加减速下摩擦力的不同表现,称为摩擦滞后特性。
1.7 法向与切向摩擦力的耦合
物体在摩擦过程中,接触界面的法向由于不光滑,也存在相对运动。系统变量和摩擦力在法向与切线方向间的耦合关系,是研究摩擦力的关键。
2 摩擦力数学模型
静态模型主要表明摩擦力只与速度有关,动态模型表明摩擦力不仅与速度有关,而且与位移有着密切的关系,可以相对真实且全面地反映摩擦现象,其实际应用价值更好。
2.1 静态摩擦模型
经典的库仑摩擦模型的数学形式。当外力小于静摩擦力时,速度为零,不会产生相对运动;当外力大于静摩擦力时,速度不为零,存在一恒定摩擦力阻碍运动的进行。可知, F f F_f Ff与 v v v方向相反,与 F N F_N FN成正比,但该模型不能反映出静摩擦力的大小,如图 2-10 所示。
F f ( ν ) = F c sgn ( ν ) F c = μ F N \begin{aligned}F_f(\nu)&=F_c\operatorname{sgn}(\nu)\\\\F_c&=\mu F_N\end{aligned} Ff(ν)Fc=Fcsgn(ν)=μFN
式中:
μ \mu μ表示摩擦系数;
v v v表示相对运动速度(m/s);
F f F_f F