波动方程初值问题能量不等式的证明
Gronwall 不等式
若非负函数 G ( τ ) G(\tau) G(τ) 在 [ 0 , T ] [0,T] [0,T] 上连续可微, G ( 0 ) = 0 G(0)=0 G(0)=0,且对 τ ∈ [ 0 , T ] \tau\in[0,T] τ∈[0,T]满足 d G ( τ ) d τ ≤ C G ( τ ) + F ( τ ) \frac{dG(\tau)}{d\tau}\leq CG(\tau)+F(\tau) dτdG(τ)≤CG(τ)+F(τ) 其中 C C C 为常数且 C > 0 C>0 C>0, F ( τ ) F(\tau) F(τ) 是 [ 0 , T ] [0,T] [0,T] 上不减的非负可积函数,
那么有:
d G ( τ ) d τ ≤ e C τ F ( τ ) \frac{dG(\tau)}{d\tau}\leq e^{C\tau}F(\tau) dτdG(τ)≤eCτF(τ) G ( τ ) ≤ C − 1 ( e C τ − 1 ) F ( τ ) G(\tau)\leq C^{-1}(e^{C\tau}-1)F(\tau) G(τ)≤C−1(eCτ−1)F(τ)
常用的替换技巧
u t u t t = 1 2 ⋅ 2 u t ⋅ u t t = 1 2 ( u t 2 ) t u_{t}u_{tt}=\frac{1}{2}\cdot 2u_{t}\cdot u_{tt}=\frac{1}{2}(u_{t}^2)_t ututt=21⋅2ut⋅utt=21(ut2)t u u t = 1 2 ⋅ 2 u ⋅ u t = 1 2 ( u 2 ) t uu_t=\frac{1}{2}\cdot 2u\cdot u_t =\frac{1}{2}(u^2)_t uut=21⋅2u⋅ut=21(u2)t u u x x = ( u u x ) x − u x 2 = u x 2 + u u x x − u x 2 uu_{xx}=(uu_x)_x-u_x^2=u_x^2+uu_{xx}-u_x^2 uuxx=(uux)x−ux2=ux2+uuxx−ux2 ∵ ( u t u x ) x = u t x u x + u t u x x \because(u_{t}u_{x})_x=u_{tx}u_{x}+u_{t}u_{xx} ∵(utux)x=utxux+utuxx ∴ u t u x x = ( u t u x ) x − u t x u x \therefore u_{t}u_{xx}=(u_{t}u_{x})_x-u_{tx}u_{x} ∴utuxx=(utux)x−utxux
u u u 二阶导函数连续时, u x t = u t x u_{xt}=u_{tx} uxt=utx ∴ u t x u x = 1 2 ( u x 2 ) t = 1 2 ⋅ 2 u x ⋅ u x t = u x u t x \therefore u_{tx}u_{x} = \frac{1}{2}(u_{x}^2)_t=\frac{1}{2}\cdot 2u_{x}\cdot u_{xt}=u_{x}u_{tx} ∴utxux=21(ux2)t=21⋅2ux⋅uxt=uxutx ∴ u t u x x = ( u t u x ) x − 1 2 ( u x 2 ) t \therefore u_{t}u_{xx}=(u_{t}u_{x})_x-\frac{1}{2}(u_{x}^2)_t ∴utuxx=(utux)x−21(ux2)t
能量不等式证明过程
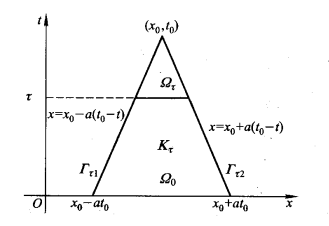
规定 x x x 增长的方向为正方向,而 G r e e n Green Green 公式曲线积分时,组成梯形区域 K τ K_{\tau} Kτ 边界 ∂ K τ \partial K_{\tau} ∂Kτ 的四条线段按照右手法则,只有 Ω 0 \Omega_0 Ω0 这条线段的方向是与右手法则一致,所以有:
∂
K
τ
=
Ω
0
∪
(
−
Γ
τ
2
)
∪
(
−
Ω
τ
)
∪
(
−
Γ
τ
1
)
\partial K_{\tau} =\Omega_0\cup(-\Gamma_{\tau_{2}})\cup(-\Omega_{\tau})\cup(-\Gamma_{\tau_{1}})
∂Kτ=Ω0∪(−Γτ2)∪(−Ωτ)∪(−Γτ1)
此外,在
∂
K
τ
\partial K_{\tau}
∂Kτ 计算曲线积分时,关于
x
,
t
x,t
x,t 都积分,但是这两条边
Ω
0
,
Ω
τ
\Omega_0,\Omega_{\tau}
Ω0,Ωτ 只在
x
x
x 方向有增长,而在
t
t
t 方向无增长,那么这两条线段在计算曲线积分时关于
d
t
dt
dt 的积分项为
0
0
0
待证明的两个不等式:
∫
Ω
τ
[
u
t
2
(
x
,
τ
)
+
a
2
u
x
2
(
x
,
τ
)
]
d
x
≤
M
[
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
+
∫
K
τ
f
2
(
x
,
t
)
d
x
d
t
]
\int_{\Omega_\tau} \left[u_t^2(x, \tau) + a^2 u_x^2(x, \tau)\right] dx \leq M \left[ \int_{\Omega_0} (\psi^2 + a^2 \varphi_x^2) dx + \int_{K_\tau} f^2(x,t) dxdt \right]
∫Ωτ[ut2(x,τ)+a2ux2(x,τ)]dx≤M[∫Ω0(ψ2+a2φx2)dx+∫Kτf2(x,t)dxdt]
∫
K
τ
[
u
t
2
(
x
,
t
)
+
a
2
u
x
2
(
x
,
t
)
]
d
x
d
t
≤
M
[
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
+
∫
K
τ
f
2
(
x
,
t
)
d
x
d
t
]
\int_{K_\tau} \left[u_t^2(x,t) + a^2 u_x^2(x,t)\right] dxdt \leq M \left[ \int_{\Omega_0} (\psi^2 + a^2 \varphi_x^2) dx + \int_{K_\tau} f^2(x,t) dxdt \right]
∫Kτ[ut2(x,t)+a2ux2(x,t)]dxdt≤M[∫Ω0(ψ2+a2φx2)dx+∫Kτf2(x,t)dxdt]
- 在波动方程 ∂ 2 u ∂ t 2 − a 2 ∂ 2 u ∂ x 2 = f \frac{\partial^2 u}{\partial t^2}-a^2\frac{\partial^2 u}{\partial x^2}=f ∂t2∂2u−a2∂x2∂2u=f 两端同乘以 ∂ u ∂ t \frac{\partial u}{\partial t} ∂t∂u 并在区域 K τ K_\tau Kτ 上积分并按照前面的常用替换得:
∬ K τ u t u t t − a 2 u t u x x d x d t = ∬ K τ u f d x d t \iint_{K_\tau}u_{t}u_{tt}-a^2u_{t}u_{xx}dxdt=\iint_{K_\tau}ufdxdt ∬Kτututt−a2utuxxdxdt=∬Kτufdxdt$
∬ K τ 1 2 ( u t 2 + a 2 u x 2 ) t − a 2 ( u t u x ) x d x d t = ∬ K τ u f d x d t \iint_{K_\tau}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)_t-a^2(u_tu_{x})_{x}dxdt=\iint_{K_\tau}ufdxdt ∬Kτ21(ut2+a2ux2)t−a2(utux)xdxdt=∬Kτufdxdt
- 应用下面这个
G
r
e
e
n
Green
Green 公式将上面等式左边替换
∬ Ω ∂ P ∂ t + ∂ Q ∂ x d σ = ∮ ∂ Ω − P d x + Q d t \iint_{\Omega}\frac{\partial P}{\partial t}+\frac{\partial Q}{\partial x}d\sigma=\oint_{\partial\Omega}-Pdx+Qdt ∬Ω∂t∂P+∂x∂Qdσ=∮∂Ω−Pdx+Qdt其中 P = 1 2 ( u t 2 + a 2 u x 2 ) P=\frac{1}{2}(u_{t}^2+a^2u_{x}^2) P=21(ut2+a2ux2), Q = − a 2 ( u t u x ) Q=-a^2(u_tu_{x}) Q=−a2(utux),得闭合曲线积分
∮ ∂ K τ [ − 1 2 ( u t 2 + a 2 u x 2 ) d x − a 2 ( u t u x ) d t ] \oint_{\partial{K_{\tau}}}[-\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx-a^2(u_tu_{x})dt] ∮∂Kτ[−21(ut2+a2ux2)dx−a2(utux)dt]
= − ∮ ∂ K τ a 2 ( u t u x ) d t + 1 2 ( u t 2 + a 2 u x 2 ) d x =-\oint_{\partial{K_{\tau}}}a^2(u_tu_{x})dt+\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx =−∮∂Kτa2(utux)dt+21(ut2+a2ux2)dx
记 a 2 ( u t u x ) d t + 1 2 ( u t 2 + a 2 u x 2 ) d x = □ a^2(u_tu_{x})dt+\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx = \square a2(utux)dt+21(ut2+a2ux2)dx=□,
∵ ∂ K τ = Ω 0 ∪ ( − Γ τ 2 ) ∪ ( − Ω τ ) ∪ ( − Γ τ 1 ) \because \partial K_{\tau} =\Omega_0\cup(-\Gamma_{\tau_{2}})\cup(-\Omega_{\tau})\cup(-\Gamma_{\tau_{1}}) ∵∂Kτ=Ω0∪(−Γτ2)∪(−Ωτ)∪(−Γτ1)
∴ − ∮ ∂ K τ a 2 ( u t u x ) d t + 1 2 ( u t 2 + a 2 u x 2 ) d x \therefore -\oint_{\partial{K_{\tau}}}a^2(u_tu_{x})dt+\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx ∴−∮∂Kτa2(utux)dt+21(ut2+a2ux2)dx
= − [ ∫ Ω 0 □ − ∫ Ω τ □ − ∫ Γ τ 1 □ − ∫ Γ τ 2 □ ] =-[\int_{\Omega_0}\square-\int_{\Omega_{\tau}}\square-\int_{\Gamma_{\tau_{1}}}\square-\int_{\Gamma_{\tau_{2}}}\square] =−[∫Ω0□−∫Ωτ□−∫Γτ1□−∫Γτ2□]
Ω 0 , Ω τ \Omega_0,\Omega_{\tau} Ω0,Ωτ 只在 x x x 方向有增长,而在 t t t 方向无增长,那么这两条线段在计算曲线积分时关于 d t dt dt 的积分项为 0 0 0,可得
− ∮ ∂ K τ a 2 ( u t u x ) d t + 1 2 ( u t 2 + a 2 u x 2 ) d x -\oint_{\partial{K_{\tau}}}a^2(u_tu_{x})dt+\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx −∮∂Kτa2(utux)dt+21(ut2+a2ux2)dx
= ∫ Γ τ 1 ∪ Γ τ 2 a 2 ( u t u x ) d t + 1 2 ( u t 2 + a 2 u x 2 ) d x − ∫ Ω 0 1 2 ( u t 2 + a 2 u x 2 ) d x + ∫ Ω τ 1 2 ( u t 2 + a 2 u x 2 ) d x =\int_{\Gamma_{\tau_{1}}\cup\Gamma_{\tau_{2}}}a^2(u_tu_{x})dt+\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx-\int_{\Omega_0}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx+\int_{\Omega_\tau}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx =∫Γτ1∪Γτ2a2(utux)dt+21(ut2+a2ux2)dx−∫Ω021(ut2+a2ux2)dx+∫Ωτ21(ut2+a2ux2)dx
记上面等式的三项分别为 J 1 , J 2 , J 3 J_1,J_2,J_3 J1,J2,J3,即:
J 1 = ∫ Γ τ 1 ∪ Γ τ 2 a 2 ( u t u x ) d t + 1 2 ( u t 2 + a 2 u x 2 ) d x J_1=\int_{\Gamma_{\tau_{1}}\cup\Gamma_{\tau_{2}}}a^2(u_tu_{x})dt+\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx J1=∫Γτ1∪Γτ2a2(utux)dt+21(ut2+a2ux2)dx
J 2 = − ∫ Ω 0 1 2 ( u t 2 + a 2 u x 2 ) d x J_2=-\int_{\Omega_0}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx J2=−∫Ω021(ut2+a2ux2)dx
J 3 = ∫ Ω τ 1 2 ( u t 2 + a 2 u x 2 ) d x J_3=\int_{\Omega_\tau}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx J3=∫Ωτ21(ut2+a2ux2)dx
- 应用下面
d
x
dx
dx 和
d
t
dt
dt 的关系,将
J
1
J_1
J1 统一为只关于
d
t
dt
dt 的积分
Γ τ 1 : d x = a d t \Gamma_{\tau_{1}}:dx=adt Γτ1:dx=adt Γ τ 2 : d x = − a d t \Gamma_{\tau_{2}}:dx=-adt Γτ2:dx=−adt
即
J
1
=
∫
Γ
τ
1
a
2
(
u
t
u
x
)
d
t
+
1
2
a
(
u
t
2
+
a
2
u
x
2
)
d
t
+
∫
Γ
τ
2
a
2
(
u
t
u
x
)
d
t
−
1
2
a
(
u
t
2
+
a
2
u
x
2
)
d
t
J_1=\int_{\Gamma_{\tau_{1}}}a^2(u_tu_{x})dt+\frac{1}{2}a(u_{t}^2+a^2u_{x}^2)dt+\int_{\Gamma_{\tau_{2}}}a^2(u_tu_{x})dt-\frac{1}{2}a(u_{t}^2+a^2u_{x}^2)dt
J1=∫Γτ1a2(utux)dt+21a(ut2+a2ux2)dt+∫Γτ2a2(utux)dt−21a(ut2+a2ux2)dt
=
∫
Γ
τ
1
a
2
(
2
a
u
t
u
x
+
u
t
2
+
a
2
u
x
2
)
d
t
+
∫
Γ
τ
1
a
2
(
2
a
u
t
u
x
−
u
t
2
−
a
2
u
x
2
)
d
t
=\int_{\Gamma_{\tau_{1}}}\frac{a}{2}(2au_tu_{x}+u_{t}^2+a^2u_{x}^2)dt+\int_{\Gamma_{\tau_{1}}}\frac{a}{2}(2au_tu_{x}-u_{t}^2-a^2u_{x}^2)dt
=∫Γτ12a(2autux+ut2+a2ux2)dt+∫Γτ12a(2autux−ut2−a2ux2)dt
利用完全平方公式得
J 1 = ∫ Γ τ 1 a 2 ( u t + a u x ) 2 d t − ∫ Γ τ 2 a 2 ( u t − a u x ) 2 d t J_1=\int_{\Gamma_{\tau_{1}}}\frac{a}{2}(u_t+au_x)^2dt-\int_{\Gamma_{\tau_{2}}}\frac{a}{2}(u_t-au_x)^2dt J1=∫Γτ12a(ut+aux)2dt−∫Γτ22a(ut−aux)2dt
因为在 Γ τ 1 \Gamma_{\tau_{1}} Γτ1 线段上规定的正方向是 t t t 增长的方向,而 Γ τ 2 \Gamma_{\tau_{2}} Γτ2 上相反,所以 t t t 的积分限分别是 0 0 0 到 τ \tau τ 和 τ \tau τ 到 0 0 0 ,也即
J 1 = ∫ 0 τ a 2 ( u t + a u x ) 2 d t − ∫ τ 0 a 2 ( u t − a u x ) 2 d t ≥ 0 J_1=\int_{0}^{\tau}\frac{a}{2}(u_t+au_x)^2dt-\int_{\tau}^0\frac{a}{2}(u_t-au_x)^2dt\geq0 J1=∫0τ2a(ut+aux)2dt−∫τ02a(ut−aux)2dt≥0
第一项平方项且积分下限小于上限故其积分非负,而第二项是平方项在积分下限大于上限加上前面的负号,故也是非负,所以 J 1 ≥ 0 J_1\geq0 J1≥0
- 把
J
1
,
J
2
,
J
3
J_1,J_2,J_3
J1,J2,J3 写回来,根据
J
1
≥
0
J_1\geq0
J1≥0 构造不等关系
J 1 + J 2 + J 3 = ∬ K τ u t f d x d t J_1+J_2+J_3=\iint_{K_{\tau}}u_{t}fdxdt J1+J2+J3=∬Kτutfdxdt
∵ J 1 ≥ 0 \because J_1\geq0 ∵J1≥0
∴ J 3 ≤ J 1 + J 3 = J 1 + J 2 + J 3 − J 2 = ∬ K τ u t f d x d t − J 2 \therefore J_3\leq J_1+J_3=J_1+J_2+J_3-J_2=\iint_{K_{\tau}}u_{t}fdxdt-J_2 ∴J3≤J1+J3=J1+J2+J3−J2=∬Kτutfdxdt−J2
也即 ∫ Ω τ 1 2 ( u t 2 + a 2 u x 2 ) d x ≤ ∬ K τ u t f d x d t + ∫ Ω 0 1 2 ( u t 2 + a 2 u x 2 ) d x \int_{\Omega_\tau}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx\leq \iint_{K_{\tau}}u_{t}fdxdt+\int_{\Omega_0}\frac{1}{2}(u_{t}^2+a^2u_{x}^2)dx ∫Ωτ21(ut2+a2ux2)dx≤∬Kτutfdxdt+∫Ω021(ut2+a2ux2)dx
两边同乘 2 2 2 且 Ω 0 \Omega_0 Ω0 是 t = 0 t=0 t=0 的线段,而 t = 0 t=0 t=0 时, u t ( x , 0 ) = ψ , u x ( x , 0 ) = φ x u_t(x,0)=\psi,u_x(x,0)=\varphi_{x} ut(x,0)=ψ,ux(x,0)=φx即
∫ Ω τ ( u t 2 + a 2 u x 2 ) d x ≤ ∬ K τ 2 u t f d x d t + ∫ Ω 0 ( ψ 2 + a 2 φ x 2 ) d x \int_{\Omega_\tau}(u_{t}^2+a^2u_{x}^2)dx\leq \iint_{K_{\tau}}2u_{t}fdxdt+\int_{\Omega_0}(\psi^2+a^2\varphi_{x}^2)dx ∫Ωτ(ut2+a2ux2)dx≤∬Kτ2utfdxdt+∫Ω0(ψ2+a2φx2)dx
对上面不等式右边
∬
K
τ
2
u
t
f
d
x
d
t
\iint_{K_{\tau}}2u_{t}fdxdt
∬Kτ2utfdxdt 这一项应用
C
a
u
c
h
y
Cauchy
Cauchy 不等式
2
a
b
≤
a
2
+
b
2
2ab\leq a^2+b^2
2ab≤a2+b2 得
∫
Ω
τ
(
u
t
2
+
a
2
u
x
2
)
d
x
≤
∬
K
τ
u
t
2
+
f
2
d
x
d
t
+
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
\int_{\Omega_\tau}(u_{t}^2+a^2u_{x}^2)dx\leq \iint_{K_{\tau}}u_{t}^2+f^2dxdt+\int_{\Omega_0}(\psi^2+a^2\varphi_{x}^2)dx
∫Ωτ(ut2+a2ux2)dx≤∬Kτut2+f2dxdt+∫Ω0(ψ2+a2φx2)dx
此时,对比要证明的不等式
∫
Ω
τ
(
u
t
2
+
a
2
u
x
2
)
d
x
≤
∬
K
τ
f
2
d
x
d
t
+
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
\int_{\Omega_\tau}(u_{t}^2+a^2u_{x}^2)dx\leq \iint_{K_{\tau}}f^2dxdt+\int_{\Omega_0}(\psi^2+a^2\varphi_{x}^2)dx
∫Ωτ(ut2+a2ux2)dx≤∬Kτf2dxdt+∫Ω0(ψ2+a2φx2)dx
发现只是右端多了一项
∬
K
τ
u
t
2
d
x
d
t
\iint_{K_{\tau}}u_{t}^2dxdt
∬Kτut2dxdt
- 利用 G r o n w a l l Gronwall Gronwall 不等式将该项消去
令 G ( τ ) = ∬ K τ ( u t 2 + a 2 u x 2 ) d x d t = ∫ 0 τ ∫ x 0 − a ( t 0 − t ) x 0 + a ( t 0 − t ) ( u t 2 + a 2 u x 2 ) d x d t G(\tau)=\iint_{K_{\tau}}(u_{t}^2+a^2u_{x}^2)dxdt=\int_{0}^{\tau}\int_{x_0-a(t_0-t)}^{x_0+a(t_0-t)}(u_{t}^2+a^2u_{x}^2)dxdt G(τ)=∬Kτ(ut2+a2ux2)dxdt=∫0τ∫x0−a(t0−t)x0+a(t0−t)(ut2+a2ux2)dxdt
则 d G ( τ ) d τ = ∫ Ω τ ( u t 2 + a 2 u x 2 ) d x \frac{dG(\tau)}{d\tau}=\int_{\Omega_\tau}(u_{t}^2+a^2u_{x}^2)dx dτdG(τ)=∫Ωτ(ut2+a2ux2)dx 是待证明不等式的左端
令 F ( τ ) = ∬ K τ f 2 d x d t + ∫ Ω 0 ( ψ 2 + a 2 φ x 2 ) d x F(\tau)=\iint_{K_{\tau}}f^2dxdt+\int_{\Omega_0}(\psi^2+a^2\varphi_{x}^2)dx F(τ)=∬Kτf2dxdt+∫Ω0(ψ2+a2φx2)dx
给
∫
Ω
τ
(
u
t
2
+
a
2
u
x
2
)
d
x
≤
∬
K
τ
u
t
2
+
f
2
d
x
d
t
+
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
\int_{\Omega_\tau}(u_{t}^2+a^2u_{x}^2)dx\leq \iint_{K_{\tau}}u_{t}^2+f^2dxdt+\int_{\Omega_0}(\psi^2+a^2\varphi_{x}^2)dx
∫Ωτ(ut2+a2ux2)dx≤∬Kτut2+f2dxdt+∫Ω0(ψ2+a2φx2)dx 右边添加
∬
K
τ
a
2
u
x
2
d
x
d
t
\iint_{K_{\tau}}a^2u_{x}^2dxdt
∬Kτa2ux2dxdt,则
∫
Ω
τ
(
u
t
2
+
a
2
u
x
2
)
d
x
≤
∬
K
τ
u
t
2
+
a
2
u
x
2
+
f
2
d
x
d
t
+
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
\int_{\Omega_\tau}(u_{t}^2+a^2u_{x}^2)dx\leq \iint_{K_{\tau}}u_{t}^2+a^2u_{x}^2+f^2dxdt+\int_{\Omega_0}(\psi^2+a^2\varphi_{x}^2)dx
∫Ωτ(ut2+a2ux2)dx≤∬Kτut2+a2ux2+f2dxdt+∫Ω0(ψ2+a2φx2)dx
那么此时该不等式满足
G
r
o
n
w
a
l
l
Gronwall
Gronwall 不等式的前提条件
d
G
(
τ
)
d
τ
≤
C
G
(
τ
)
+
F
(
τ
)
\frac{dG(\tau)}{d\tau}\leq CG(\tau)+F(\tau)
dτdG(τ)≤CG(τ)+F(τ)
此时
C
=
1
C=1
C=1,那么由
G
r
o
n
w
a
l
l
Gronwall
Gronwall 不等式的两个结论,可分别得到如下两个能量不等式,其中
M
=
e
τ
M=e^\tau
M=eτ
∫
Ω
τ
[
u
t
2
(
x
,
τ
)
+
a
2
u
x
2
(
x
,
τ
)
]
d
x
≤
M
[
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
+
∫
K
τ
f
2
(
x
,
t
)
d
x
d
t
]
\int_{\Omega_\tau} \left[u_t^2(x, \tau) + a^2 u_x^2(x, \tau)\right] dx \leq M \left[ \int_{\Omega_0} (\psi^2 + a^2 \varphi_x^2) dx + \int_{K_\tau} f^2(x,t) dxdt \right]
∫Ωτ[ut2(x,τ)+a2ux2(x,τ)]dx≤M[∫Ω0(ψ2+a2φx2)dx+∫Kτf2(x,t)dxdt]
∫
K
τ
[
u
t
2
(
x
,
t
)
+
a
2
u
x
2
(
x
,
t
)
]
d
x
d
t
≤
M
[
∫
Ω
0
(
ψ
2
+
a
2
φ
x
2
)
d
x
+
∫
K
τ
f
2
(
x
,
t
)
d
x
d
t
]
\int_{K_\tau} \left[u_t^2(x,t) + a^2 u_x^2(x,t)\right] dxdt \leq M \left[ \int_{\Omega_0} (\psi^2 + a^2 \varphi_x^2) dx + \int_{K_\tau} f^2(x,t) dxdt \right]
∫Kτ[ut2(x,t)+a2ux2(x,t)]dxdt≤M[∫Ω0(ψ2+a2φx2)dx+∫Kτf2(x,t)dxdt]
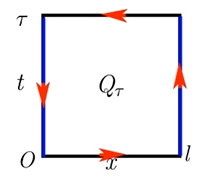
波动方程混合问题能量不等式的证明
待证明的两个不等式:
∫
0
l
[
u
t
2
(
x
,
τ
)
+
a
2
u
x
2
(
x
,
τ
)
]
d
x
≤
M
[
∫
0
l
(
ψ
2
+
a
2
φ
x
2
)
d
x
+
∫
Q
τ
f
2
d
x
d
t
]
\int_{0}^{l} \left[u_t^2(x, \tau) + a^2 u_x^2(x, \tau)\right] dx \leq M \left[ \int_{0}^{l} (\psi^2 + a^2 \varphi_x^2) dx + \int_{Q_\tau} f^2 dxdt \right]
∫0l[ut2(x,τ)+a2ux2(x,τ)]dx≤M[∫0l(ψ2+a2φx2)dx+∫Qτf2dxdt]
∬
Q
τ
(
u
t
2
+
a
2
u
x
2
)
d
x
d
t
≤
M
[
∫
0
l
(
ψ
2
+
a
2
φ
x
2
)
d
x
+
∫
Q
τ
f
2
d
x
d
t
]
\iint_{Q_\tau} \left(u_t^2 + a^2 u_x^2\right) dxdt \leq M \left[ \int_{0}^{l} (\psi^2 + a^2 \varphi_x^2) dx + \int_{Q_\tau} f^2 dxdt \right]
∬Qτ(ut2+a2ux2)dxdt≤M[∫0l(ψ2+a2φx2)dx+∫Qτf2dxdt]
二维区域的情况下,这里可以不用
G
r
e
e
n
Green
Green 公式将面积分转为线积分,可以直接按照二重积分展开。
- 在波动方程 u t t − a 2 u x x = f u_{tt}-a^2u_{xx}=f utt−a2uxx=f 两端同乘 u t u_t ut 并在区域 Q τ = ( 0 , l ) × ( 0 , τ ) Q_\tau=(0,l)\times(0,\tau) Qτ=(0,l)×(0,τ) 上积分
∬ Q τ u t u t t − a 2 u t u x x d x d t = ∬ Q τ u t f d x d t \iint_{Q_\tau}u_{t}u_{tt}-a^2u_{t}u_{xx}dxdt=\iint_{Q_\tau}u_tf dxdt ∬Qτututt−a2utuxxdxdt=∬Qτutfdxdt
利用常用的替换技巧
u
t
u
t
t
=
1
2
⋅
2
u
t
⋅
u
t
t
=
1
2
(
u
t
2
)
t
u_{t}u_{tt}=\frac{1}{2}\cdot 2u_{t}\cdot u_{tt}=\frac{1}{2}(u_{t}^2)_t
ututt=21⋅2ut⋅utt=21(ut2)t
u
t
u
x
x
=
(
u
t
u
x
)
x
−
1
2
(
u
x
2
)
t
u_{t}u_{xx}=(u_{t}u_{x})_x-\frac{1}{2}(u_{x}^2)_t
utuxx=(utux)x−21(ux2)t得
∬
Q
τ
1
2
(
u
t
2
)
t
+
1
2
a
2
(
u
x
2
)
t
−
(
a
2
u
t
u
x
)
x
d
x
d
t
\iint_{Q_\tau}\frac{1}{2}(u_{t}^2)_t+\frac{1}{2}a^2(u_{x}^2)_t-(a^2u_tu_x)_xdxdt
∬Qτ21(ut2)t+21a2(ux2)t−(a2utux)xdxdt,这里用二重积分展开
∬ Q τ 1 2 ( u t 2 ) t + 1 2 a 2 ( u x 2 ) t − ( a 2 u t u x ) x d x d t \iint_{Q_\tau}\frac{1}{2}(u_{t}^2)_t+\frac{1}{2}a^2(u_{x}^2)_t-(a^2u_tu_x)_xdxdt ∬Qτ21(ut2)t+21a2(ux2)t−(a2utux)xdxdt
= ∫ 0 τ ∫ 0 l [ ( 1 2 u t 2 + 1 2 a 2 u x 2 ) t − ( a 2 u t u x ) x ] d x d t =\int_{0}^{\tau}\int_{0}^{l}[(\frac{1}{2}u_{t}^2+\frac{1}{2}a^2u_{x}^2)_t-(a^2u_tu_x)_x]dxdt =∫0τ∫0l[(21ut2+21a2ux2)t−(a2utux)x]dxdt
= ∫ 0 l 1 2 u t 2 ( x , τ ) + 1 2 a 2 u x 2 ( x , τ ) d x − ∫ 0 l 1 2 u t 2 ( x , 0 ) + 1 2 a 2 u x 2 ( x , 0 ) d x − ∫ 0 τ a 2 u t ( l , t ) u x ( l , t ) d t + ∫ 0 τ a 2 u t ( 0 , t ) u x ( 0 , t ) d t =\int_{0}^{l}\frac{1}{2}u_{t}^{2}(x,\tau)+\frac{1}{2}a^2u_{x}^{2}(x,\tau)dx-\int_{0}^{l}\frac{1}{2}u_{t}^{2}(x,0)+\frac{1}{2}a^2u_{x}^{2}(x,0)dx-\int_{0}^{\tau}a^2u_{t}(l,t)u_{x}(l,t)dt+\int_{0}^{\tau}a^2u_{t}(0,t)u_{x}(0,t)dt =∫0l21ut2(x,τ)+21a2ux2(x,τ)dx−∫0l21ut2(x,0)+21a2ux2(x,0)dx−∫0τa2ut(l,t)ux(l,t)dt+∫0τa2ut(0,t)ux(0,t)dt
- 根据初始条件和齐次边界条件替换上面表达式
初始条件:
u
t
(
x
,
0
)
=
ψ
(
x
)
u_t(x,0)=\psi(x)
ut(x,0)=ψ(x)
u
x
(
x
,
0
)
=
φ
x
(
x
)
u_x(x,0)=\varphi_x(x)
ux(x,0)=φx(x)
边界条件:
u
(
0
,
t
)
=
0
u(0,t)=0
u(0,t)=0
u
(
l
,
t
)
=
0
u(l,t)=0
u(l,t)=0即杆的两端是固定的,也即速度为
0
0
0
u
t
(
l
,
t
)
=
u
t
(
0
,
t
)
=
0
u_t(l,t)=u_t(0,t)=0
ut(l,t)=ut(0,t)=0 带入
1.
1.
1. 得到的等式并两边同乘
2
2
2 得
=
∫
0
l
u
t
2
(
x
,
τ
)
+
a
2
u
x
2
(
x
,
τ
)
d
x
=
∫
0
l
ψ
2
+
a
2
φ
x
2
d
x
+
2
∫
0
τ
∫
0
l
u
t
f
d
x
d
t
=\int_{0}^{l}u_{t}^{2}(x,\tau)+a^2u_{x}^{2}(x,\tau)dx=\int_{0}^{l}\psi^2+a^2\varphi_{x}^{2}dx+2\int_{0}^{\tau}\int_{0}^{l}u_tfdxdt
=∫0lut2(x,τ)+a2ux2(x,τ)dx=∫0lψ2+a2φx2dx+2∫0τ∫0lutfdxdt
对等式右边应用
C
a
u
c
h
y
Cauchy
Cauchy 不等式以及添加非负项
∫
0
τ
∫
0
l
a
2
u
x
2
d
x
d
t
\int_{0}^{\tau}\int_{0}^{l}a^2u_{x}^2dxdt
∫0τ∫0la2ux2dxdt 得
∫ 0 l u t 2 ( x , τ ) + a 2 u x 2 ( x , τ ) d x ≤ ∫ 0 l ψ 2 + a 2 φ x 2 d x + ∫ 0 τ ∫ 0 l f 2 d x d t + ∫ 0 τ ∫ 0 l u t 2 + a 2 u x 2 d x d t \int_{0}^{l}u_{t}^{2}(x,\tau)+a^2u_{x}^{2}(x,\tau)dx\leq \int_{0}^{l}\psi^2+a^2\varphi_{x}^{2}dx+\int_{0}^{\tau}\int_{0}^{l}f^2dxdt+\int_{0}^{\tau}\int_{0}^{l}u_{t}^2+a^2u_{x}^2dxdt ∫0lut2(x,τ)+a2ux2(x,τ)dx≤∫0lψ2+a2φx2dx+∫0τ∫0lf2dxdt+∫0τ∫0lut2+a2ux2dxdt
- 应用 G r o n w a l l Gronwall Gronwall 不等式
令 G ( τ ) = ∫ 0 τ ∫ 0 l u t 2 + a 2 u x 2 d x d t G(\tau) = \int_{0}^{\tau}\int_{0}^{l}u_{t}^2+a^2u_{x}^2dxdt G(τ)=∫0τ∫0lut2+a2ux2dxdt
F ( τ ) = ∫ 0 l ψ 2 + a 2 φ x 2 d x + ∫ 0 τ ∫ 0 l f 2 d x d t F(\tau)=\int_{0}^{l}\psi^2+a^2\varphi_{x}^{2}dx+\int_{0}^{\tau}\int_{0}^{l}f^2dxdt F(τ)=∫0lψ2+a2φx2dx+∫0τ∫0lf2dxdt
那么 d G ( τ ) d τ = ∫ 0 l u t 2 ( x , τ ) + a 2 u x 2 ( x , τ ) d x \frac{dG(\tau)}{d\tau}=\int_{0}^{l}u_{t}^{2}(x,\tau)+a^2u_{x}^{2}(x,\tau)dx dτdG(τ)=∫0lut2(x,τ)+a2ux2(x,τ)dx
将 G ( τ ) , F ( τ ) , d G ( τ ) d τ G(\tau),F(\tau),\frac{dG(\tau)}{d\tau} G(τ),F(τ),dτdG(τ) 带入 G r o n w a l l Gronwall Gronwall 不等式的两个结论即得到待证不等式,其中 C = 1 C=1 C=1