卫星导航 | 坐标系---地理坐标系与UTM坐标系
- 世界坐标系
- 地理坐标系
- UTM坐标系

全球卫星导航系统(Global Navigation Satelite System,GNSS),简称卫星导航,是室外机器人定位的一个主要信息来源。
卫星导航能给机器人提供什么信息?
正常工作时,实际上可以提供机器人所需的所有定位信息,包括:
- 位置
- 姿态
- 速度等物理量
但是仅依靠卫星导航还不足以让机器人在室外完成自主导航任务,主要原因有一下几点:
- GNSS提供的定位精度不能满足要求,GNSS分多个细分种类,有些GNSS定位方法可以提供很高的精度,但要求物体必须静止一段时间(通常十分钟以上);也有的方法可以提供较好的动态物体定位,但需要事先架设一个或多个基站。
- GNSS的定位频率不能满足要求,一般在5-10hz
- GNSS定位可用性存在问题,不能够全天候、全场地使用,稳定性与场景、结构、物体的遮挡关系,甚至和天气有关。
GNSS定位原理:
GNSS通过测量自身与地球周围各卫星的距离来确定自身位置,与卫星的距离主要通过测量时间间隔来确定。一个卫星信号从卫星上发出时,带有一个发送时间,而GNSS接收机接收到它时,有一个接收时间,通过比较时间间隔,就能估算各卫星离我们的距离。GNSS本质上可以看成一种高精度的授时系统。

GNSS定位技术分为以下两种:
- 单点GNSS定位,即传统的米级精度卫星定位。这种定位方式价格低廉,应用广泛。大多数手机、车机等终端都具备单点卫星定位能力。在普通车辆的道路级导航中,单点定位的精度足以让驾驶员辨认出车辆位于哪条道路,但在多条道路并排时,它的精度不足以区分车辆在高速路上还是辅路上。
- RTK定位。由于卫星信号在传输中可能产生误差,发展了差分定位技术,即通过地面上的一个已知精确位置的基站与车辆通信,校正车辆卫星接收机的信号。差分定位又进一步分为位置、伪距和载波相位差分定位。
世界坐标系
GNSS提供的位置坐标为世界坐标系下的坐标
物理世界中存在多种普遍使用的世界坐标系
地理坐标系
地球上最常见的坐标系就是经纬度(Latitude Longitude)坐标系,也称为地理坐标系(Geography Coordinate System)。
再加上高度就形成了经纬高(Latitude-longitude-altitude,LLA)坐标系。
经纬度是指按横向和纵向对地球表面进行均匀的切分。经度是从本初子午线向东西各180°,纬度则是从赤道向南北各90°。这两个数值均为角度值或弧度值。高度方面则可使用海拔高度或者地心高度,它们都是相对某个基准水平面的高度。
经纬高坐标系优势:
经纬度是十分直观、好用的坐标系,能够覆盖整个地球。许多地图系统都会首选使用经纬度坐标系作为默认的坐标系。
经纬高坐标系劣势:
机器人导航地图通常覆盖城市级别或者更小的范围,经纬高坐标系会让坐标系统的有效数字变多(建筑物级别的经纬度通常要精确到小数点后8至9位),读起来比较费力。
它们与日常接触的米制单位的转换关系不够线性,例如一度经度在北京可以对应0米,在赤道可能对应上百千米。
UTM坐标系
UTM(Universal Transverse Mercator Grid System)坐标系是将地球视为一个椭球体(Wold Geodetic System 84 椭球体),投影至横躺的圆柱体上,将其展开并进行分区得到。
UTM坐标系特点:
- 它将经度分为60个区,将纬度分为20个区,并赋予标号;
- 经度方向为数字标号,纬度方向为字母标号;
- 除了各别地方,这些分区大体是均匀分布的(沿经纬度均匀分布);
- 由于地球本身是球面,它们在米制单位上并不是均匀的;
- 两级区域在平铺之后有较大畸变,所以UTM的经纬度有效范围是南北80°以内。
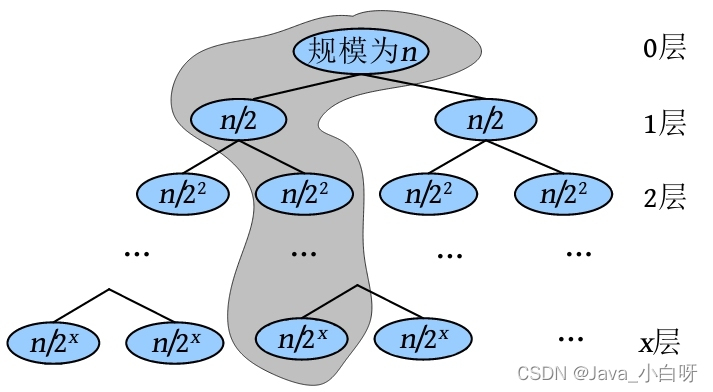
看下面的示意图,可以更好理解上面的特点
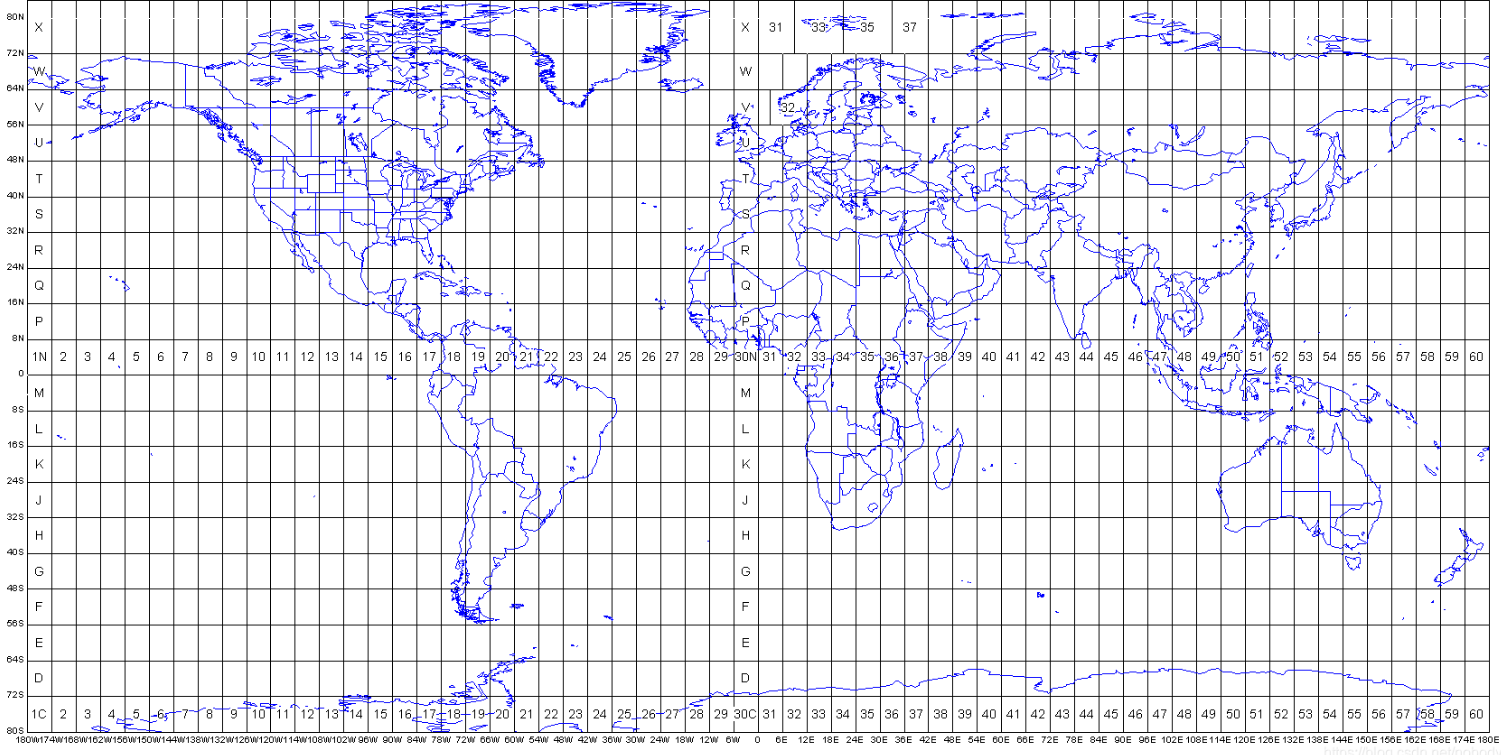
在每个分区内,UTM坐标以正东、正北的米制坐标来表达机器人位置。由于地球半径约为6378千米,可以算得UTM一格在东西向最宽约66.7万米。于是,UTM正动坐标是指,将该区的经度中心线取x=500000,然后取向东的偏移量,如果某个点落在中心线以西,则x坐标将小于500000米,但仍为正数。正北方向则以赤道的投影距离为原点,取这个点偏离赤道的距离为y坐标。那么在北半球中,将正东视为X轴,正北视为Y轴,按照右手坐标系,Z轴应该指向天空。这样就定义了一个分区内的世界坐标系,且符合东北天坐标系的习惯。或者也可以将正北视为X轴,将正东视为Y轴,Z轴指向地面,定义北东地坐标系。
UTM的优点是使用了米制坐标,与其它传感器的兼容性好,缺点是某些地区可能在两个分区的跨界处,需要进行额外的坐标处理。
由于地球的投影畸变,实际的UTM坐标与米制单位之间还有一个0.9996的倍数关系,在高精度场合中需要将其考虑进去。

![[React 进阶系列] React Context 案例学习:使用 TS 及 HOC 封装 Context](https://img-blog.csdnimg.cn/direct/f151f858117140628f8fee1c75e3459a.gif#pic_center)