概述
昇腾(Ascend)是华为推出的人工智能处理器品牌,其系列产品包括昇腾910和昇腾310芯片等。
生态情况
众所周知,华为昇腾存在的意义就是替代英伟达的GPU。从事AI开发的小伙伴,应该明白这个替代,不仅仅是 Ascend-910加速卡的算力 达到了Nvidia-A100的算力,而是需要整个AI开发生态的替代。下面简单列一下,昇腾生态与英伟达生态的一些对标项。
| Ascend | Nvidia | |
| 加速卡 | Ascend-910、Ascend-310 | Nvidia-A100、Nvidia-H100... |
| 服务器 | Atlas 800 训练服务器 | NVIDIA DGX |
| 计算架构 | CANN | CUDA cuDNN NVCC |
| 集合通信库 | HCCL | NCCL |
入门使用
假设原有基于GPU运行代码如下:
# 引入模块
import time
import torch
import torch.nn as nn
from torch.utils.data import Dataset, DataLoader
import torchvision
# 初始化运行device
device = torch.device('cuda:0')
# 定义模型网络
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
# 卷积层
nn.Conv2d(in_channels=1, out_channels=16,
kernel_size=(3, 3),
stride=(1, 1),
padding=1),
# 池化层
nn.MaxPool2d(kernel_size=2),
# 卷积层
nn.Conv2d(16, 32, 3, 1, 1),
# 池化层
nn.MaxPool2d(2),
# 将多维输入一维化
nn.Flatten(),
nn.Linear(32*7*7, 16),
# 激活函数
nn.ReLU(),
nn.Linear(16, 10)
)
def forward(self, x):
return self.net(x)
# 下载数据集
train_data = torchvision.datasets.MNIST(
root='mnist',
download=True,
train=True,
transform=torchvision.transforms.ToTensor()
)
# 定义训练相关参数
batch_size = 64
model = CNN().to(device) # 定义模型
train_dataloader = DataLoader(train_data, batch_size=batch_size) # 定义DataLoader
loss_func = nn.CrossEntropyLoss().to(device) # 定义损失函数
optimizer = torch.optim.SGD(model.parameters(), lr=0.1) # 定义优化器
epochs = 10 # 设置循环次数
# 设置循环
for epoch in range(epochs):
for imgs, labels in train_dataloader:
start_time = time.time() # 记录训练开始时间
imgs = imgs.to(device) # 把img数据放到指定NPU上
labels = labels.to(device) # 把label数据放到指定NPU上
outputs = model(imgs) # 前向计算
loss = loss_func(outputs, labels) # 损失函数计算
optimizer.zero_grad()
loss.backward() # 损失函数反向计算
optimizer.step() # 更新优化器
# 定义保存模型
torch.save({
'epoch': 10,
'arch': CNN,
'state_dict': model.state_dict(),
'optimizer' : optimizer.state_dict(),
},'checkpoint.pth.tar')参考华为官方文档快速体验-PyTorch 网络模型迁移和训练-模型开发(PyTorch)-...-文档首页-昇腾社区 (hiascend.com)
改造后,可以得到以下 用于在昇腾NPU上运行的训练代码(故意加多了全连接层的参数,以便看NPU使用情况):
# 引入模块
import time
import torch
import torch.nn as nn
from torch.utils.data import Dataset, DataLoader
import torchvision
import torch_npu
from torch_npu.npu import amp # 导入AMP模块
from torch_npu.contrib import transfer_to_npu # 使能自动迁移
# 初始化运行device
device = torch.device('npu:0')
# 定义模型网络
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
# 卷积层
nn.Conv2d(in_channels=1, out_channels=16,
kernel_size=(3, 3),
stride=(1, 1),
padding=1),
# 池化层
nn.MaxPool2d(kernel_size=2),
# 卷积层
nn.Conv2d(16, 32, 3, 1, 1),
# 池化层
nn.MaxPool2d(2),
# 将多维输入一维化
nn.Flatten(),
nn.Linear(32*7*7, 4000),
# 激活函数
nn.ReLU(),
nn.Linear(4000, 10000),
nn.ReLU(),
nn.Linear(10000, 10)
)
def forward(self, x):
return self.net(x)
# 下载数据集
train_data = torchvision.datasets.MNIST(
root='mnist',
download=True,
train=True,
transform=torchvision.transforms.ToTensor()
)
# 定义训练相关参数
# batch_size = 64
batch_size = 128
model = CNN().to(device) # 定义模型
train_dataloader = DataLoader(train_data, batch_size=batch_size) # 定义DataLoader
loss_func = nn.CrossEntropyLoss().to(device) # 定义损失函数
optimizer = torch.optim.SGD(model.parameters(), lr=0.1) # 定义优化器
scaler = amp.GradScaler() # 在模型、优化器定义之后,定义GradScaler
epochs = 20 # 设置循环次数
# 设置循环
for epoch in range(epochs):
for imgs, labels in train_dataloader:
start_time = time.time() # 记录训练开始时间
imgs = imgs.to(device) # 把img数据放到指定NPU上
labels = labels.to(device) # 把label数据放到指定NPU上
with amp.autocast():
outputs = model(imgs) # 前向计算
loss = loss_func(outputs, labels) # 损失函数计算
optimizer.zero_grad()
# 进行反向传播前后的loss缩放、参数更新
scaler.scale(loss).backward() # loss缩放并反向转播
scaler.step(optimizer) # 更新参数(自动unscaling)
scaler.update() # 基于动态Loss Scale更新loss_scaling系数
# 定义保存模型
torch.save({
'epoch': 10,
'arch': CNN,
'state_dict': model.state_dict(),
'optimizer' : optimizer.state_dict(),
},'checkpoint.pth.tar')使用 "python train.py" 运行代码后,我们可以通过以下命令查看昇腾NPU的使用情况:
watch -n 1 npu-smi info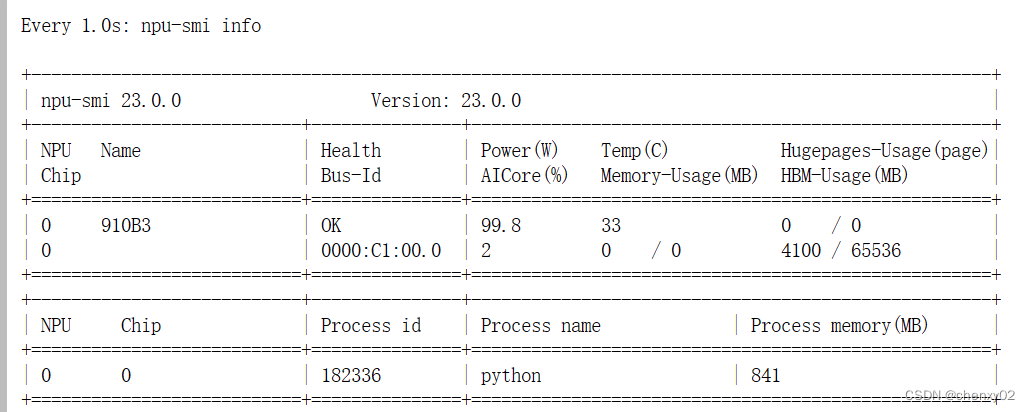





![洛谷:P3068 [USACO13JAN] Party Invitations S(枚举、前缀和)](https://img-blog.csdnimg.cn/direct/11aac5edd8ef41b7914307871ae1063a.png)