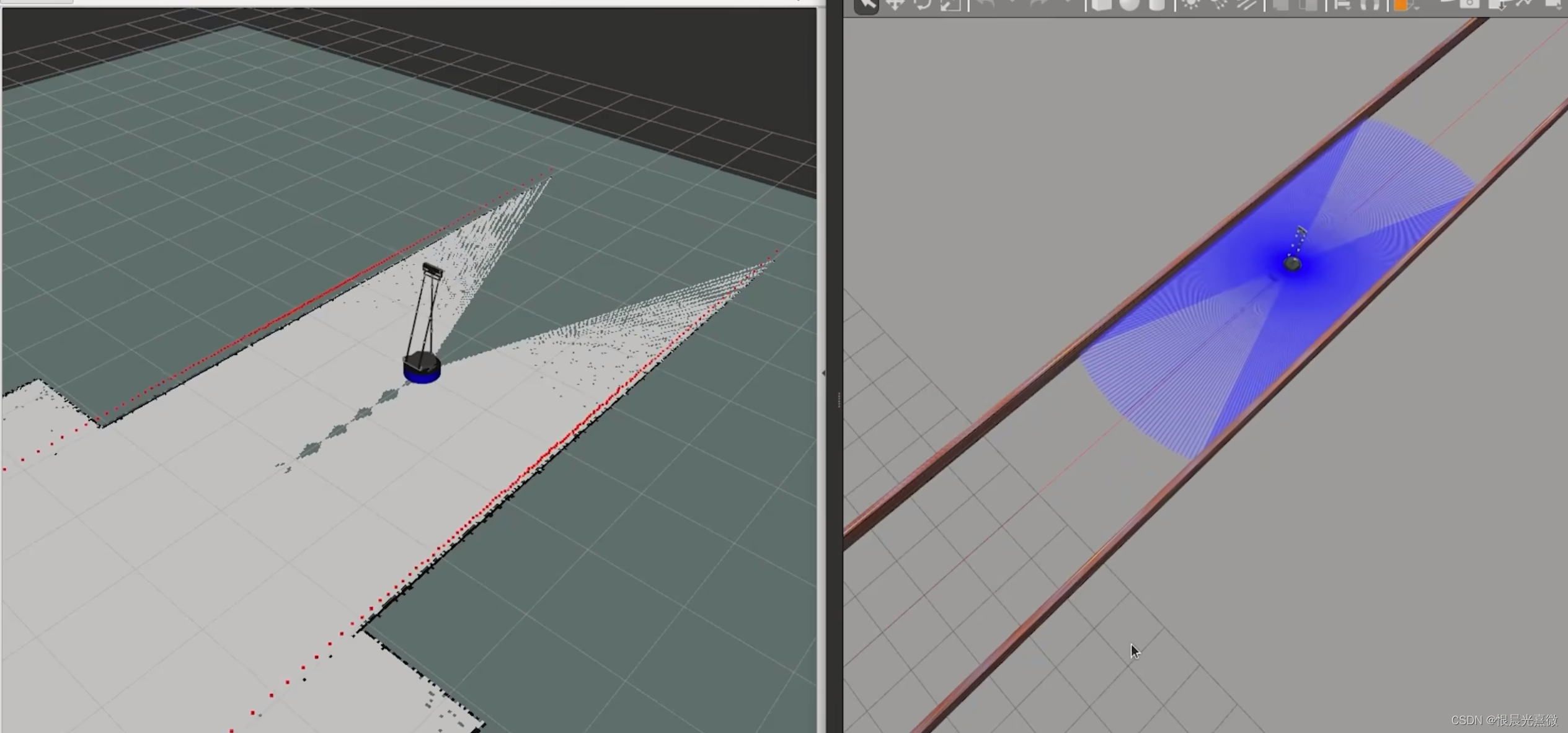
- 仅使用【障碍物点云配准算法】,很容易导致在一条长通道中,因为前后两帧的雷达点云图过于相似,导致特征匹配一直完全重合,使得机器人建图一直停留在原地,但实体机器人早就沿着通道跑向远端了;
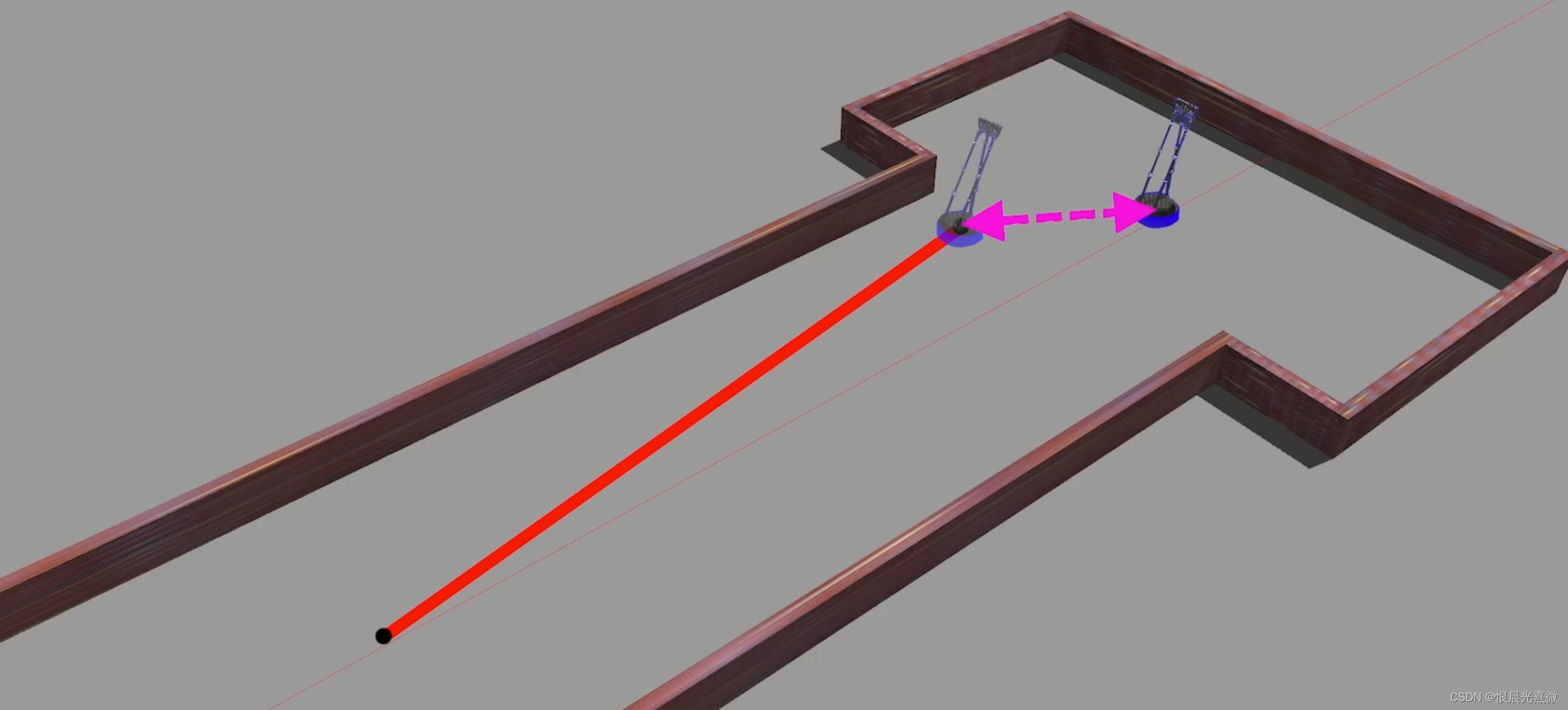
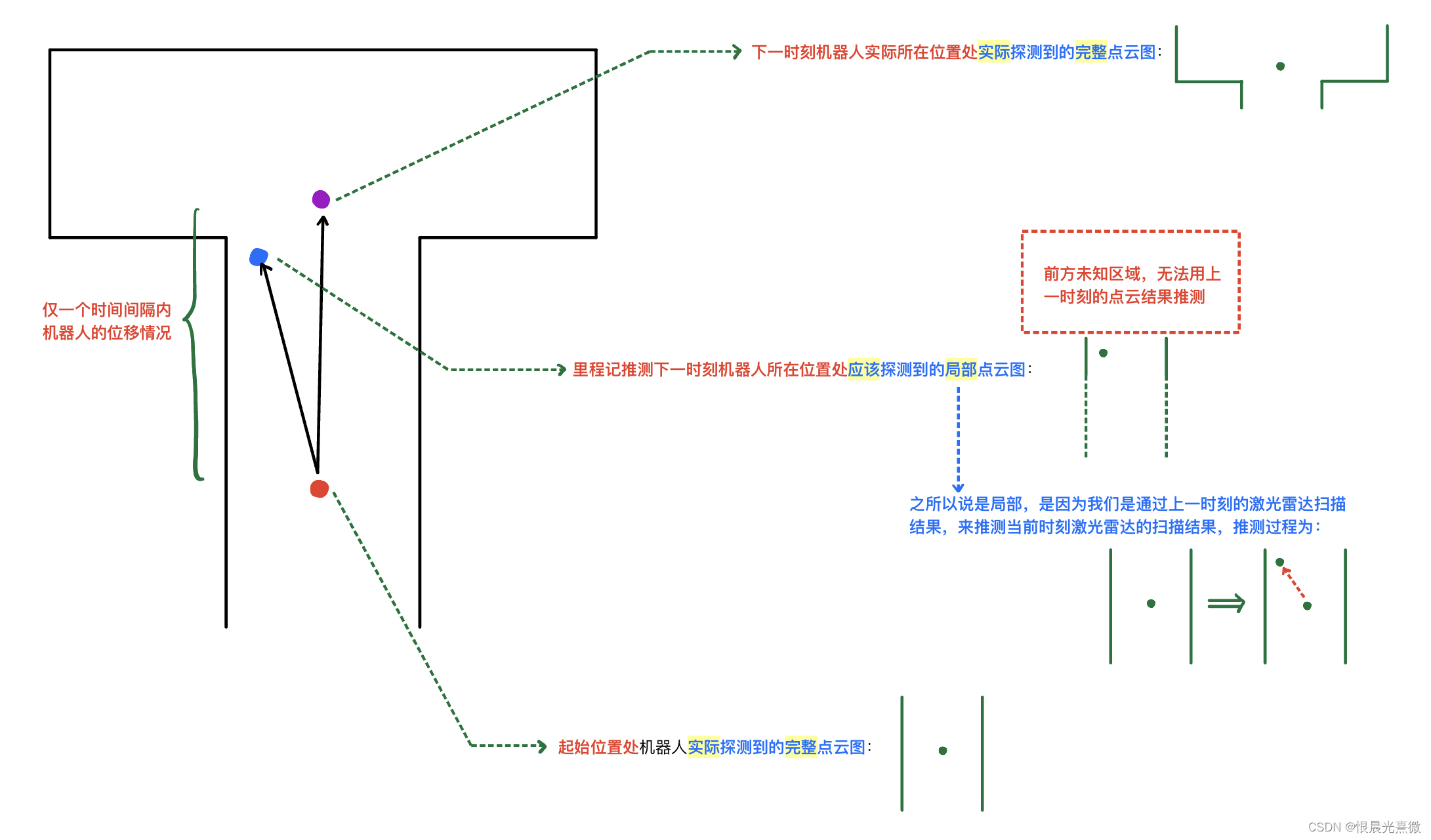
- 仅使用【里程计估算算法】,虽然可以避免上面的问题,即机器人建图一直停在原地,但是机器人的轮子在转动过程中难免会打滑,这就导致仅使用里程计估算会导致预测机器人下一时刻将要到达的位置和机器人下一时刻实际到达的位置之间存在误差;
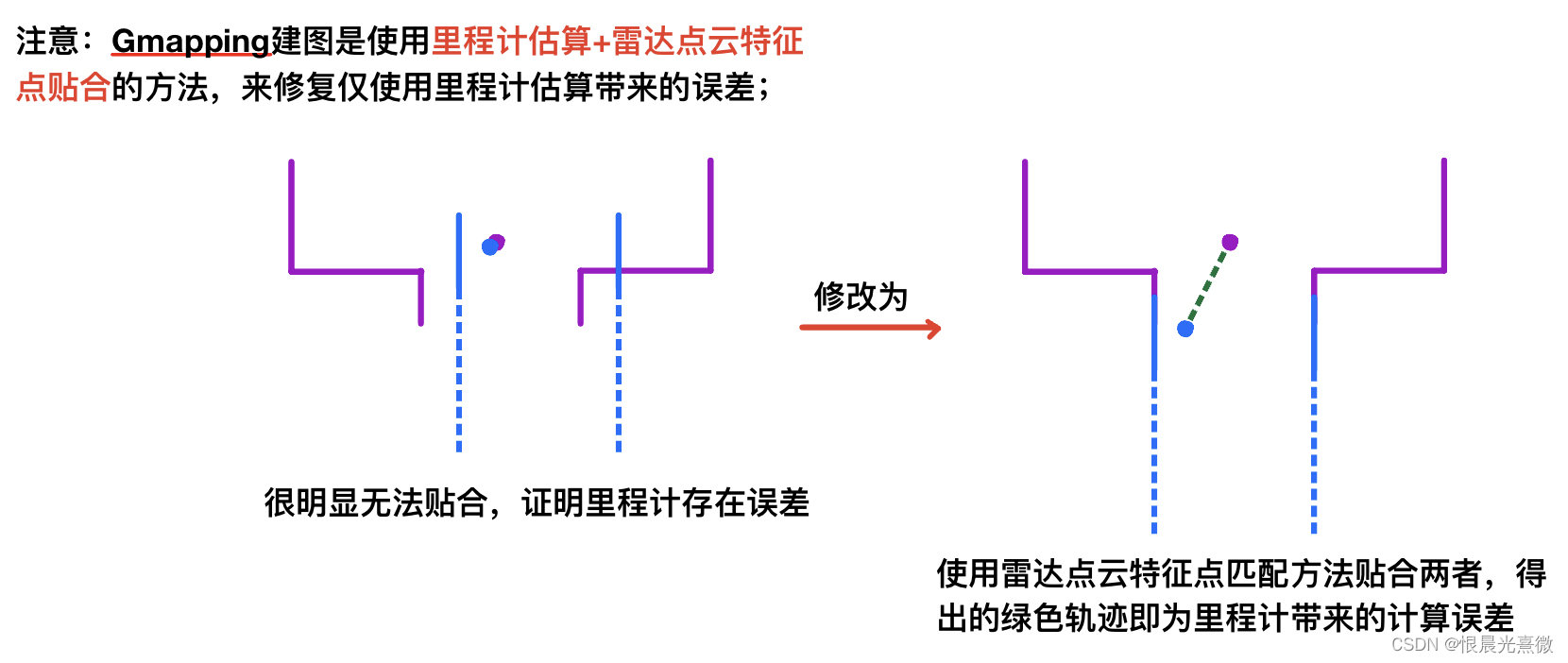
- 最好的办法是两种方法结合起来使用:(使用Gmapping软件包进行定位和建图)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1489360.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!