目录
- 1.设备基类
- 2.rtt基类
- 2.1 rtt基类定义
- 2.2 对象容器定义
- 2.3 rtt基类构造函数
- 3.io设备管理接口
- 4.总结
这层我的理解就是rtt基类和设备基类所在,所以抽离出来好点,不然每个设备类都要重复它。
1.设备基类
/include/rtdef.h中定义了设备基类struct rt_device。
在/ components / drivers / core 下的device.c中实现了设备基类的构造函数rt_device_register。
rt_err_t rt_device_register(rt_device_t dev,
const char *name,
rt_uint16_t flags)
{
if (dev == RT_NULL)
return -RT_ERROR;
if (rt_device_find(name) != RT_NULL)
return -RT_ERROR;
rt_object_init(&(dev->parent), RT_Object_Class_Device, name);
dev->flag = flags;
dev->ref_count = 0;
dev->open_flag = 0;
#ifdef RT_USING_POSIX_DEVIO
dev->fops = RT_NULL;
rt_wqueue_init(&(dev->wait_queue));
#endif /* RT_USING_POSIX_DEVIO */
return RT_EOK;
}
可以看到它主要调用了rtt基类的构造函数rt_object_init。
2.rtt基类
2.1 rtt基类定义
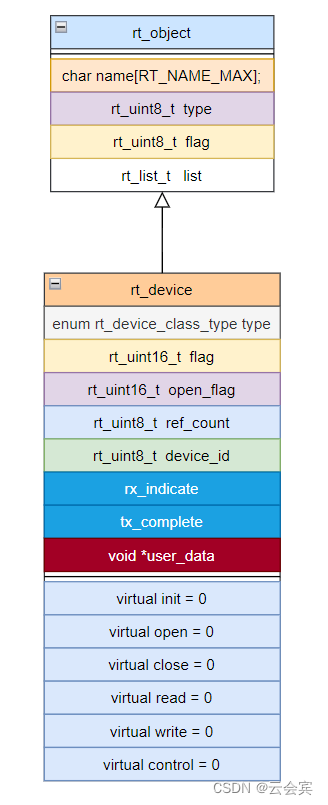
/include/rtdef.h中定义了rtt基类。类似python,rtt定义了所有类的基类——struct rt_object。
struct rt_object
{
#if RT_NAME_MAX > 0
char name[RT_NAME_MAX]; /**< dynamic name of kernel object */
#else
const char *name; /**< static name of kernel object */
#endif /* RT_NAME_MAX > 0 */
rt_uint8_t type; /**< type of kernel object */
rt_uint8_t flag; /**< flag of kernel object */
#ifdef RT_USING_MODULE
void * module_id; /**< id of application module */
#endif /* RT_USING_MODULE */
#ifdef RT_USING_SMART
rt_atomic_t lwp_ref_count; /**< ref count for lwp */
#endif /* RT_USING_SMART */
rt_list_t list; /**< list node of kernel object */
};
typedef struct rt_object *rt_object_t; /**< Type for kernel objects. */
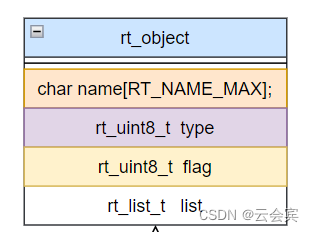
简化对象图如下
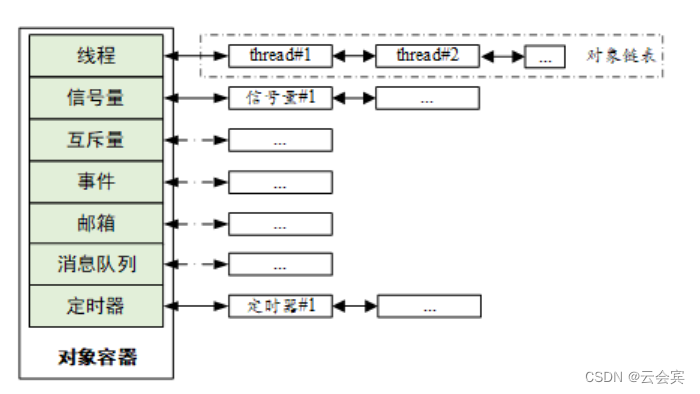
2.2 对象容器定义
在/src/object.c中定义了对象容器:
static struct rt_object_information _object_container[RT_Object_Info_Unknown];
就个数组。
struct rt_object_information如下
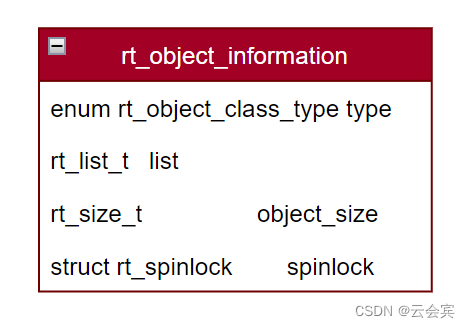
2.3 rtt基类构造函数
在/src/object.c中实现了rtt基类的构造函数:
静态rtt基类的构造函数 rt_object_init 与析构函数 rt_object_detach。
动态创建的rtt基类构造函数 rt_object_allocate 与析构函数 rt_object_delete。
不管动态还是静态构造函数,它最终的目的是把该对象的基类rt_object的成员list的成员next和prev指针挂到对象容器里——可以理解为把对象放到对象对象容器中管理。
代码示意图如下:
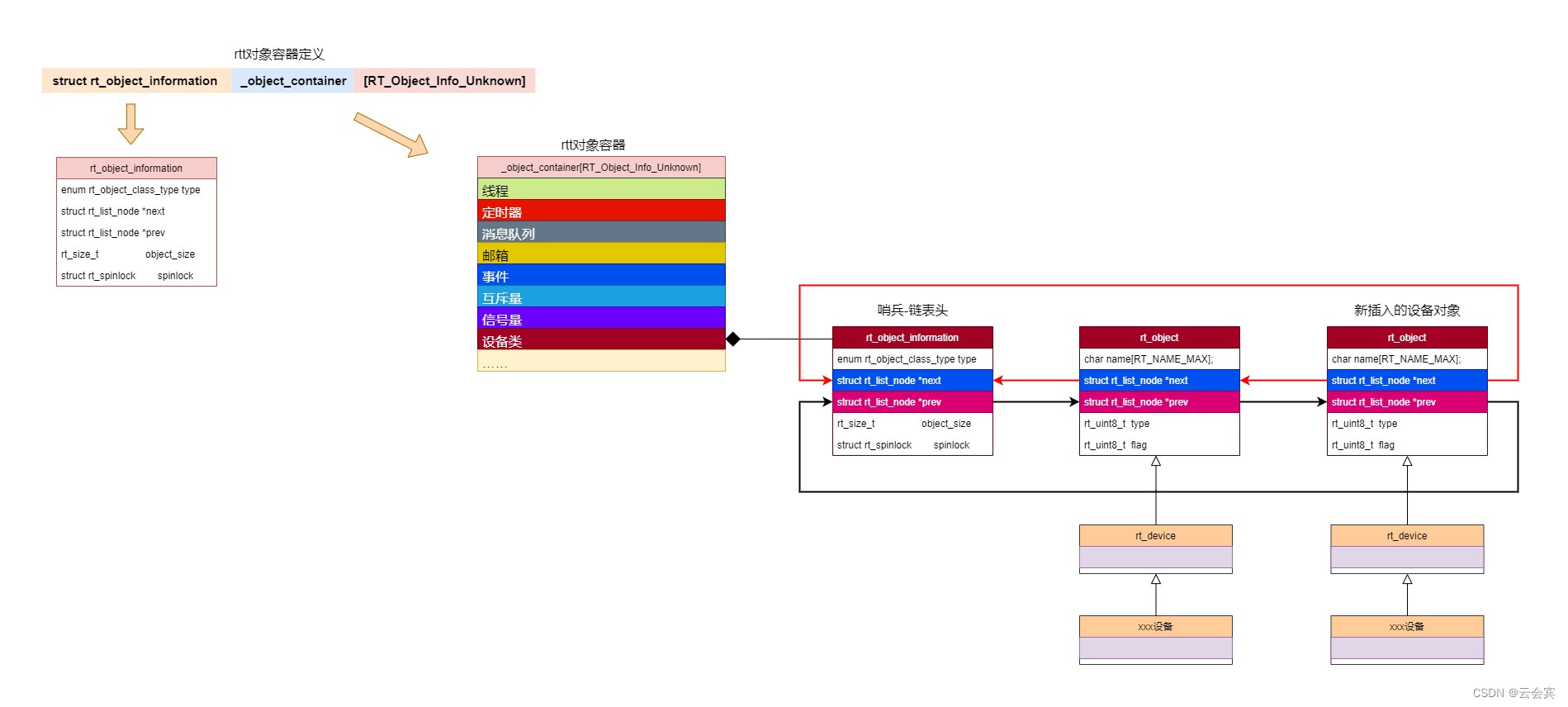
可以看到实际容器的实现是个静态数组而已,每个数组成员代表一类(线程、定时器等),我们这里是设备类,自然挂到设备类成员管理的链表中,它是个双向循环链表,插入方式是新的设备对象的基类是插入到队尾的。
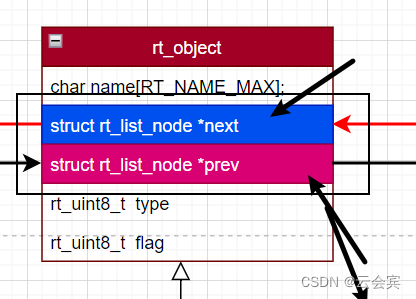
为了好绘制链表,我就把rt_object的list成员展开成了struct rt_list_node *next;和struct rt_list_node *prev。如下
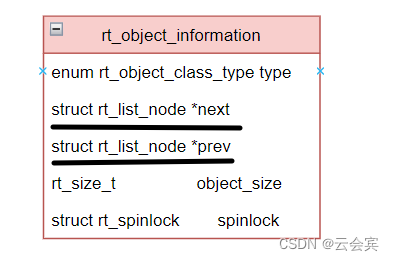
同样rt_object_information的list成员也展开成了struct rt_list_node *next;和struct rt_list_node *prev。如下
官网文档里的容器图(又高度抽象了):
但是如果对象太多,查找效率是个问题。
3.io设备管理接口
io设备管理接口是用户可以直接调用的接口,如下
rt_device_find
rt_device_init
rt_device_open
rt_device_close
rt_device_read
rt_device_write
rt_device_control
一般,我们定义完一个结构体,实例化一个对象后,直接p->属性或方法、或者采用p.属性或方法的方式来调用,但是如果太复杂,需要if判断一对上下限才能调用的话,最好封成函数,上面的管理接口干的事就是如此。
4.总结
从构造函数的流程来看,是子类调用父类的构造函数,所以章节1设为了设备基类,章节2为rtt基类。
每类都有各自的构造函数,其实质是各自结构体的初始化。
这样,构造函数的流程结果最终是把对象放到对象容器里进行管理。