准备工作
1,下载CANoe16(因为笔者只找到了官方提供的CANoe16的DEMO license)
2,安装CANoe16,点击默认安装即可,不需要安装驱动。
3,如果桌面没有找到CANoe16的打开方式可以参考 解决安装CANoe16但找不到软件打开方式的问题 进行尝试
开始学习CANoe的使用
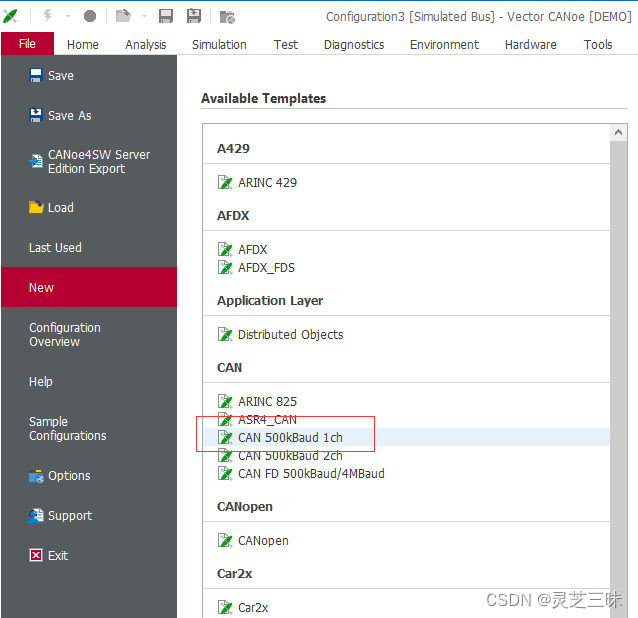
1,新建工程
创建只有一路CAN的工程
2,了解常用窗口

Home:开启/停止调试,切换软件的状态,打开Write窗口(查看运行状态信息)
Analysis:开启各类常用窗口,常用的有:Trance
Tools:编辑数据库,编写CAPL
Database
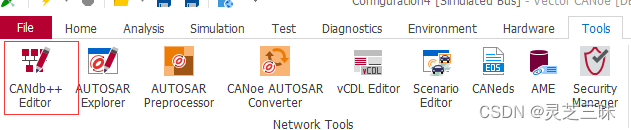
3,新建数据库
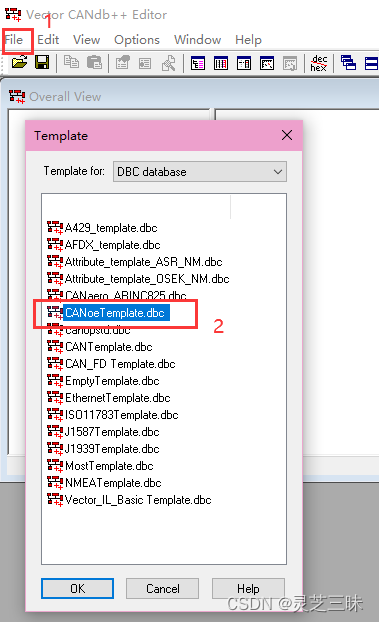
点击Tools中的CANdb++ Editor
进入Editor界面后,点击File–>Creat Database–>CANTemplate.dbc
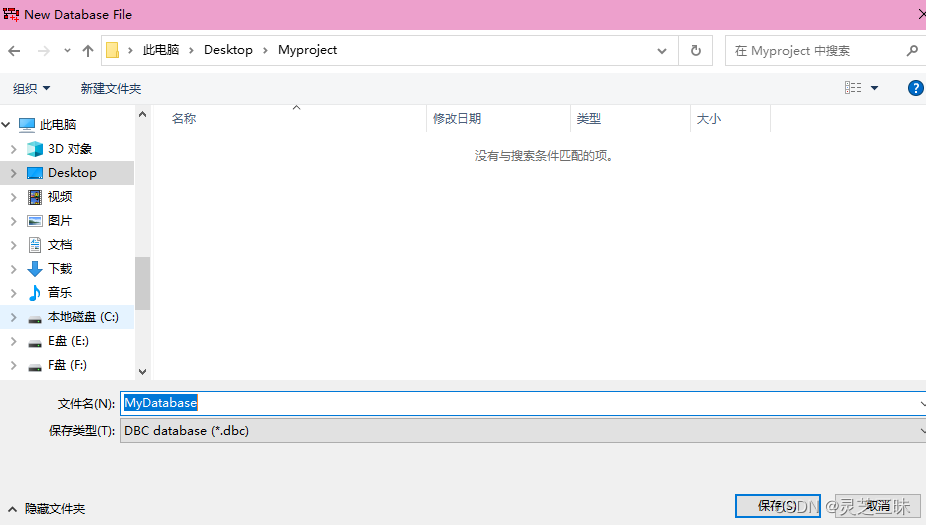
保存到一个你找得到的路径,保存的名字任意,这里取名叫MyDatabase
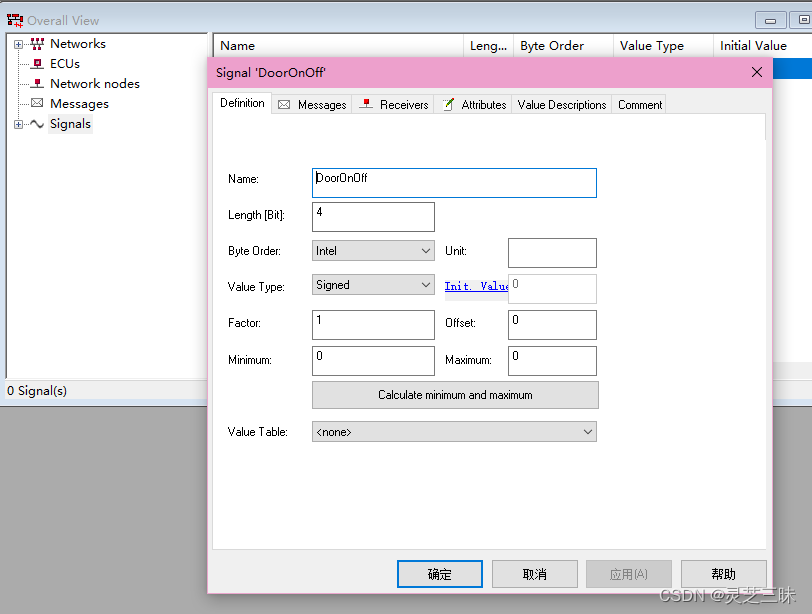
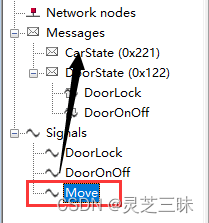
4,设置Signals
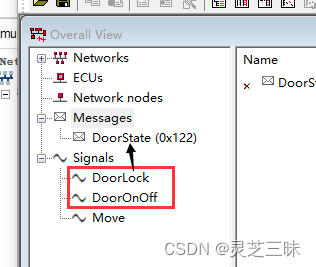
右击Signals–>New,创建第一个信号名叫DoorOnOff,长度4bit,每个bit的0和1分别表示四个车门的开关状态
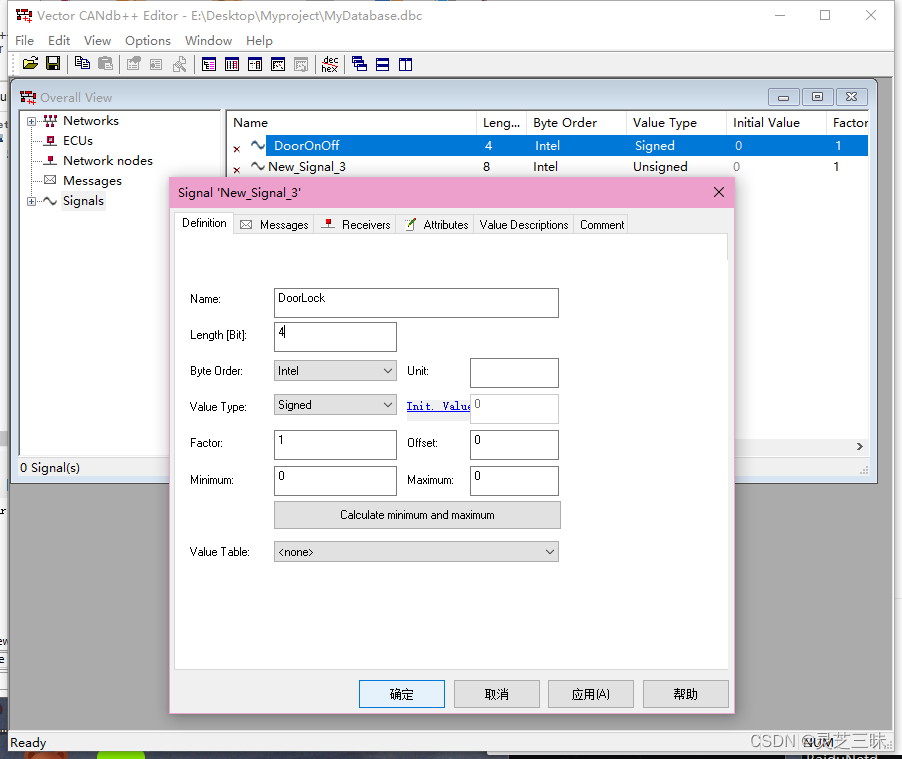
创建第二个信号名叫DoorLock,长度4bit,每个bit的0和1分别表示四个车门是否上锁
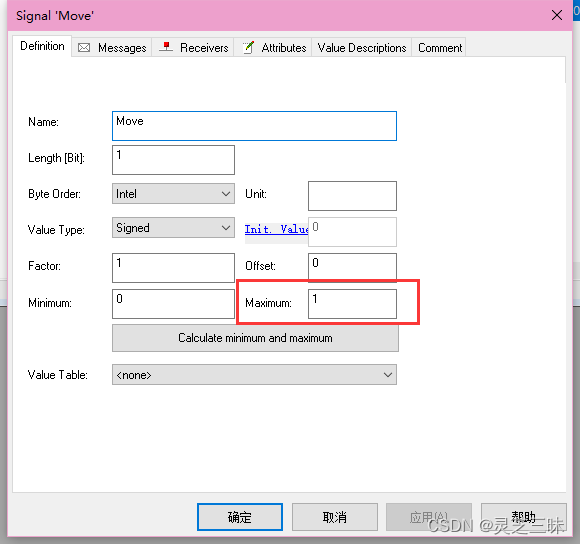
创建第三个信号名叫Move,长度1bit,0表示车静止,1表示车在运动,设置maximum为1也就是信号最大值是1。
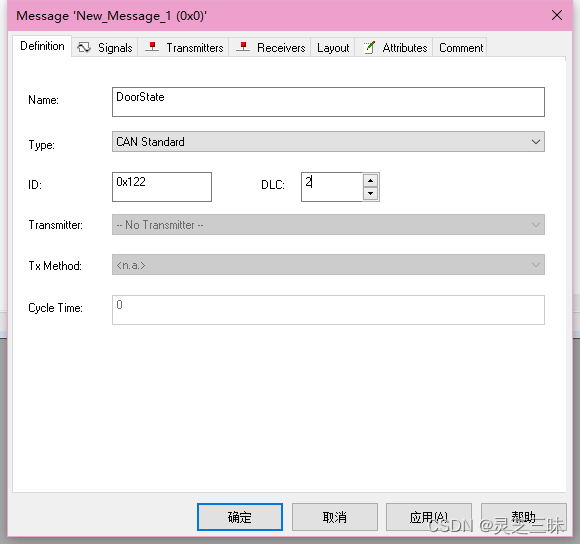
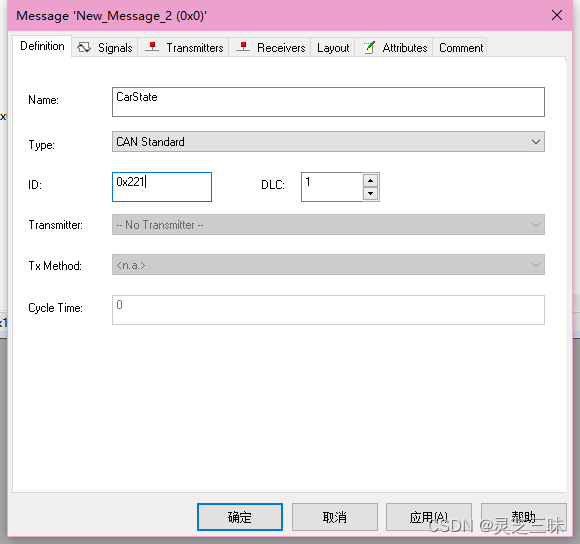
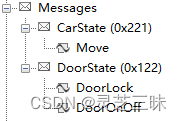
5,设置Messages
同样右键Messages–>New,新建报文。
同时设置ID和DLC,注意ID的值的范围是0–0x7FF。
接着将信号分别拖拽到对应报文的位置
这样即可
- 此时会提示你一些消息,选择是即可。
DLC的自动调整设置已经被激活
如果你保持这个设置,DLC将会被自动调整
你可以任意时刻在会话中修改这个设置
(设置(菜单:选项-设置))

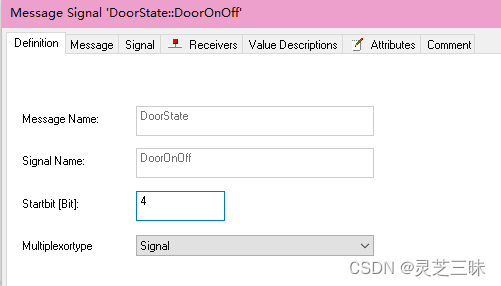
点开DoorLock和DoorONOff可以看到,系统自动帮我们设置好了数据的起始位,我们也可以自行设置,养成检查的好习惯。

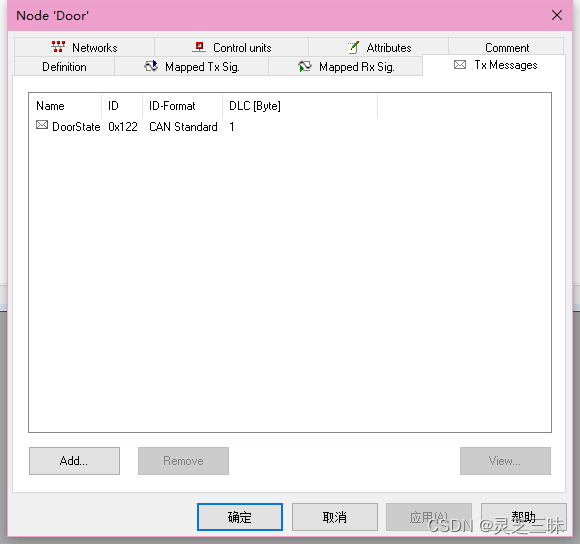
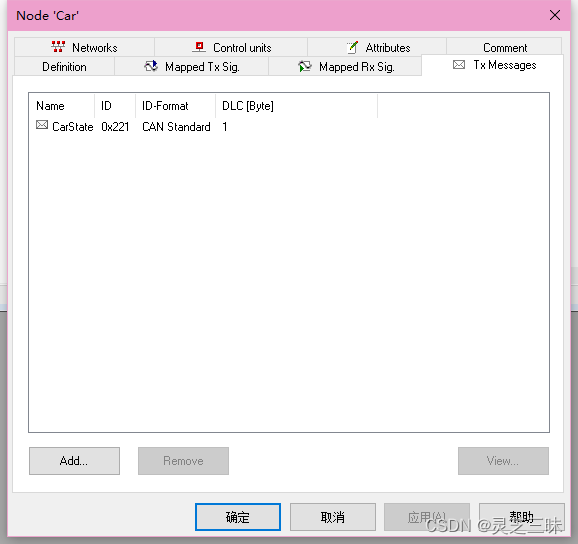
6,设置Network nodes
右击Network nodes–>new
创建三个节点,接收节点Display,发送节点Door、Car
7,导入已有工程模板
右击File–>Import Attribute Definitions
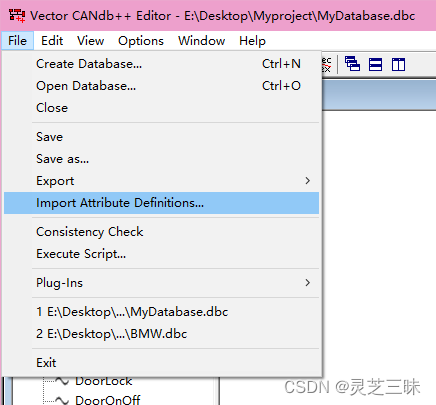
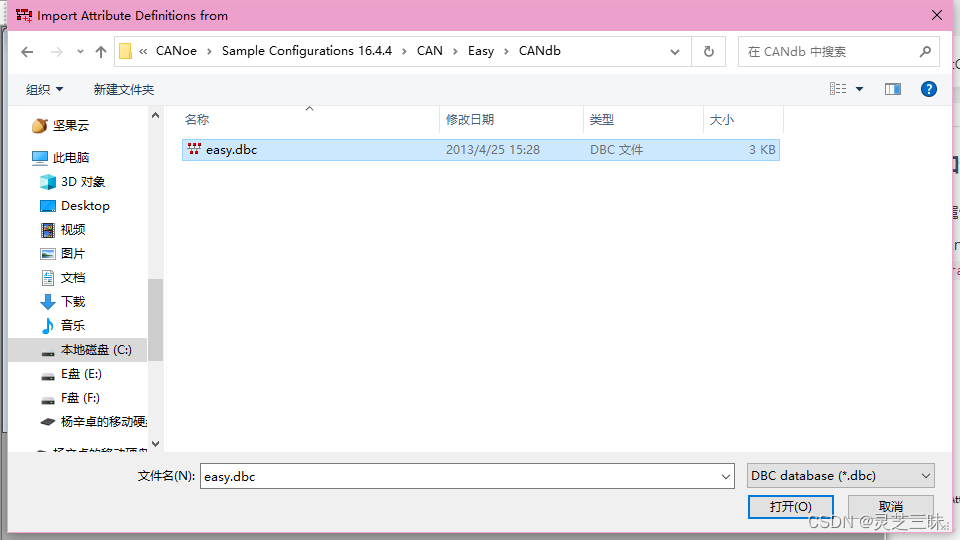
打开文件夹 C:\Users\Public\Documents\Vector\CANoe\Sample Configurations 16.4.4\CAN\Easy\CANdb
选择easy.dbc,点击打开
显示completed表示成功
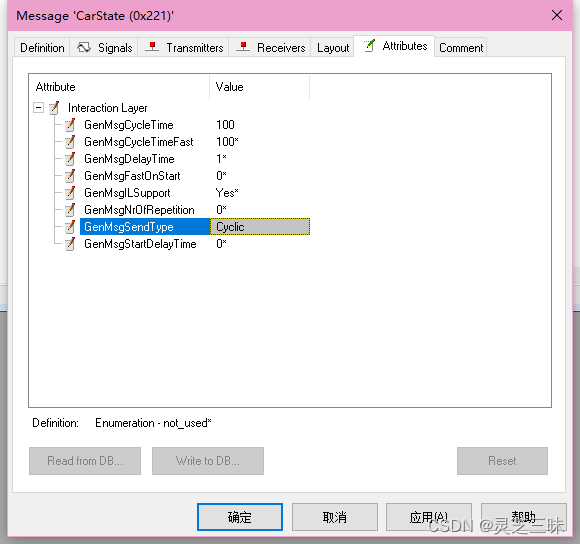
8,修改报文属性
修改每个Message的Attributes中的属性,因为导入vector自带的dbc文件后属性会变成官方的属性,所以需要我们根据需求修改报文发送参数。

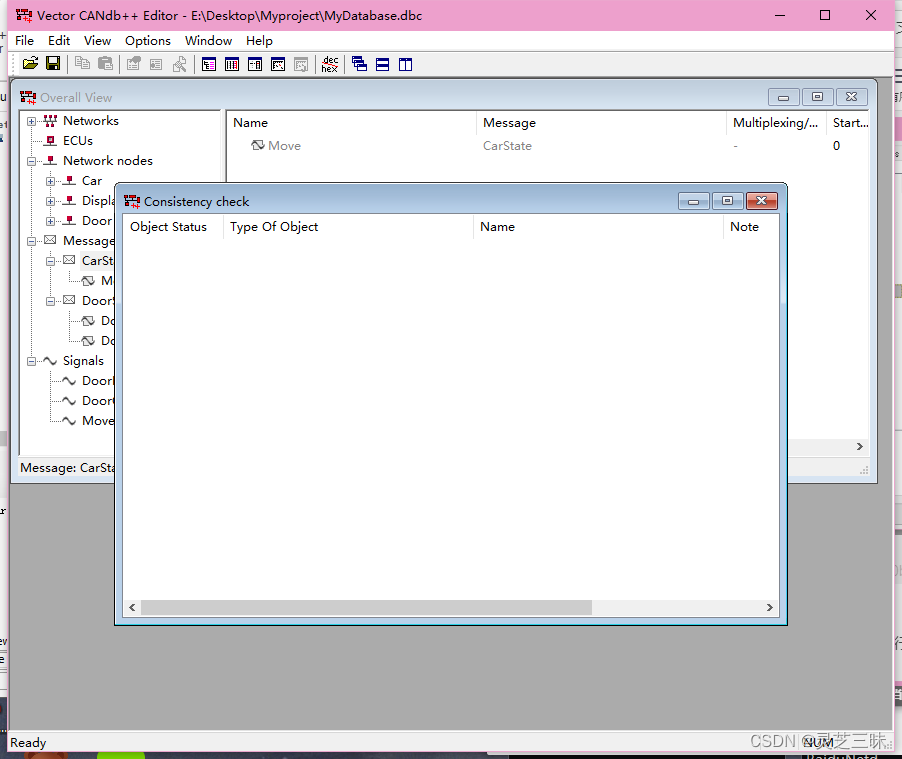
9,一致性检查
右击File–>Consistency Check,进行配置的一致性检查
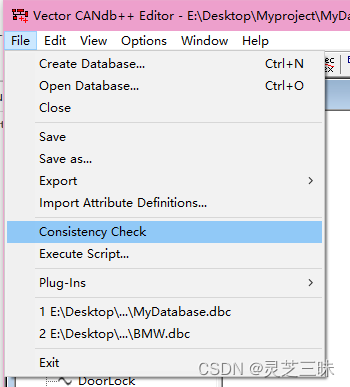
没有报错或警告提示表示设置没问题,即可保存。
CANoe
10,导入数据库
回到CANoe,右击Databases–>add
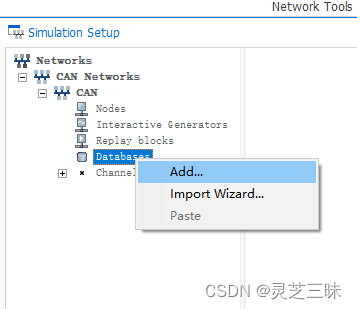
将刚才创建好的数据库添加进来

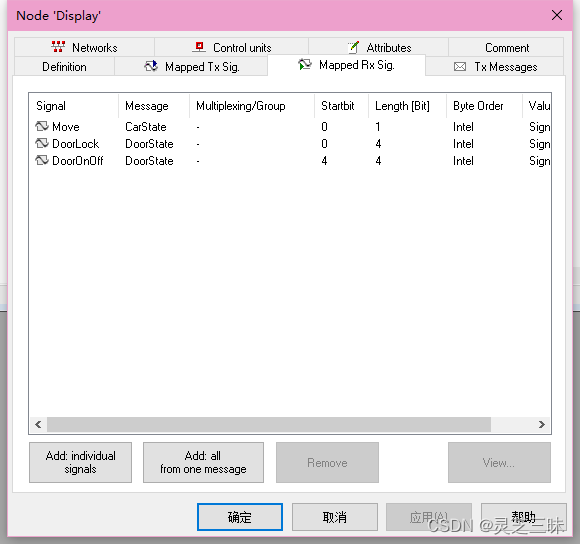
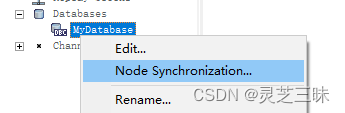
11,节点同步
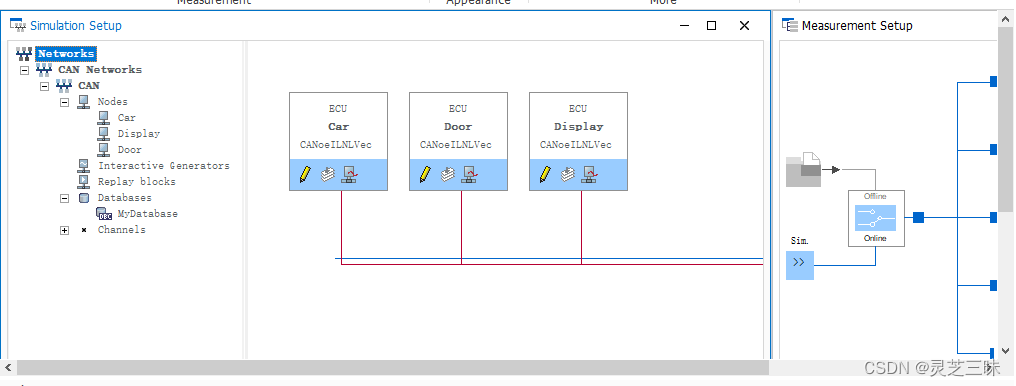
右击数据库,进入Node Synchronization界面,将左侧全部节点移到右边后点击下一页,然后完成。
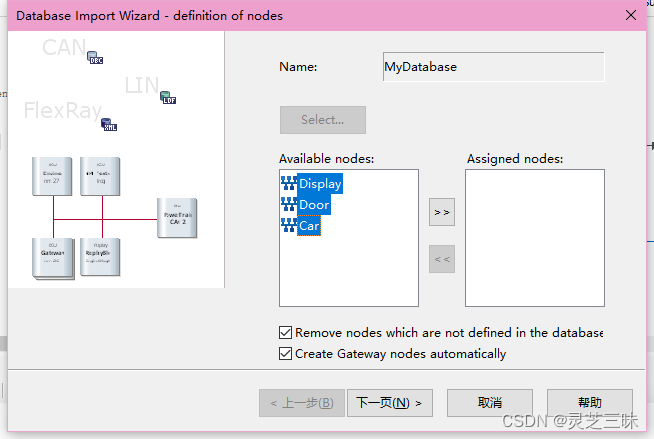
看到节点出现在窗口中表示同步成功。
运行
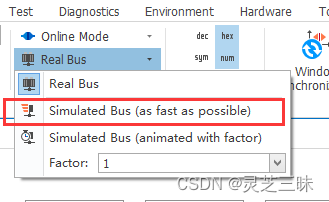
12,切换模式
将Real Bus切换成Simulation Bus,因为我们没有真实设备所以用模拟总线进行测试。
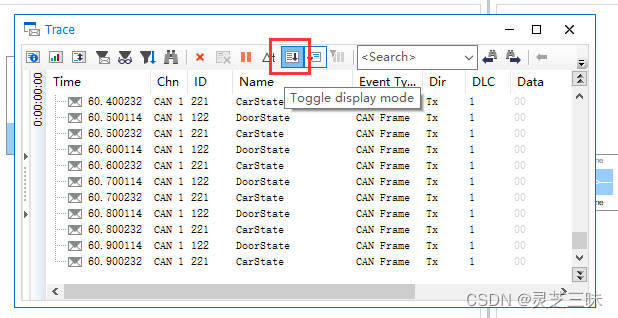
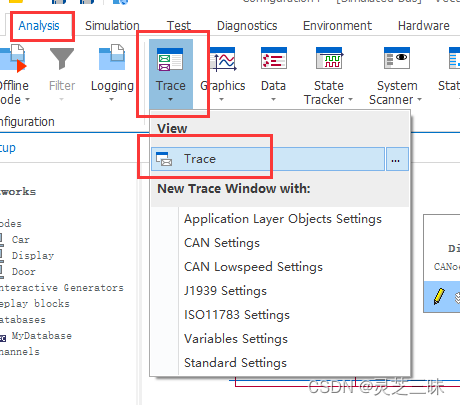
13,打开Trance窗口
点击Analysis–>Trace–>Trace打开Trace窗口,该窗口用于查看总线上的报文数据。

14,运行
点击Start
可以看到Trance窗口有数据显示了,不过数据都是默认值0
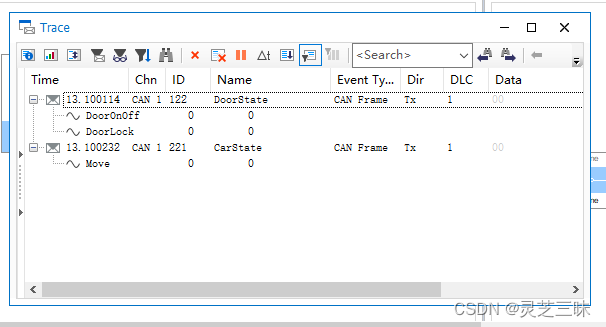
我们可以点击Toggle display mode来切换显示模式。