从最近的AR眼镜新品来看,采用MicroLED+光波导方案已经成为了明显的趋势,可见业内对于光学的大方向还是非常统一的。不仅如此,各个厂商都拿出自己最优的方案来进行探索和验证,比如有的看重“极轻”、有的看重“视觉”、有的看重“价格”,大家都有一个侧重点。
在CES 2023期间刚刚发布的雷鸟X2同样备受关注,它不仅是首款可量产的消费级全彩MicroLED光波导AR眼镜,同时还采用一体机设计,配备骁龙XR2芯片,内置单颗摄像头,可实现SLAM等,可以说是将AR眼镜中几个重要的能力集合于一身。

雷鸟X2
在雷鸟X2正式发布前,我和雷鸟创新CEO李宏伟、以及技术研发的同学一起聊了聊,让我对这款AR眼镜有了更深的认识。
雷鸟X2:双目全彩MicroLED光波导AR眼镜
熟悉的朋友可能知道,雷鸟创新在一年前就发布了雷鸟智能眼镜先锋版AR眼镜,这是首款双目全彩MicroLED+全息光波导产品,产品特点包括:全彩显示MicroLED、单层全息光波导、骁龙W4100芯片等,可以说这款产品从光学引擎、到整机设计进行了初步的市场探索和验证。
雷鸟X2则是结合了市场反馈后,雷鸟创新推出的新一代消费级双目全彩MicroLED光波导AR眼镜,更重要的是这款产品准备在今年Q1率先面向开发者,做到了真正的可量产。
除此之外,雷鸟X2相比上代雷鸟智能眼镜先锋版还是有很多变化和升级:
1, 视觉和光学升级
实际上,雷鸟X2视觉上的提升比较明显,这里面还能从显示面板、光引擎、光波导模组几个方面来看:
一是显示面板,采用新一代MicroLED,搭配全新衍射光波导,将入眼亮度从200-300nits提升到1000nits,对比度达到了100000:1。色彩从4bit升级到8bit,支持更丰富的色彩显示;
二是雷鸟创新自研的光学引擎得到大幅升级,体积从上代1cc缩小到0.7cc,同时大幅提升光学效率;
三是光波导模组,联合上游厂商进行定制,通过双层衍射光波导方案实现更高的光效、更好的亮度、色彩均匀性,提升综合视觉效果。
2, 骁龙XR2平台、支持SLAM
实际上,以显示为基础的AR眼镜对算力要求并不高,雷鸟第一代MicroLED光波导产品采用骁龙W4100芯片,这次直接升级为高端的骁龙XR2平台。其中一个原因是为了支持更好的交互效果,因此加入了一颗1600万像素的摄像头,不仅能用于视觉识别,还可用于SLAM定位。
李宏伟向青亭网谈到:“雷鸟X2采用了自研SLAM算法,得益于XR2芯片,算法直接跑在DSP上,既保证SLAM追踪的稳定性,又实现了更低的延迟和更低的功耗。”

雷鸟X2
我们知道,骁龙XR2是一颗高性能芯片,从功能性上来看骁龙XR1也能满足大部分需求,而采用骁龙XR2则是考虑到延展性。李宏伟表示:一是骁龙XR2本身工艺更先进,功耗更低;二是基于骁龙XR2的AR/VR设备和开发者生态已经很成熟,开发者更熟悉XR2平台,也能更快上手开发和移植工作,同时对雷鸟创新后续产品迭代兼容性来说也更有优势。
3, 应用场景和开发者生态
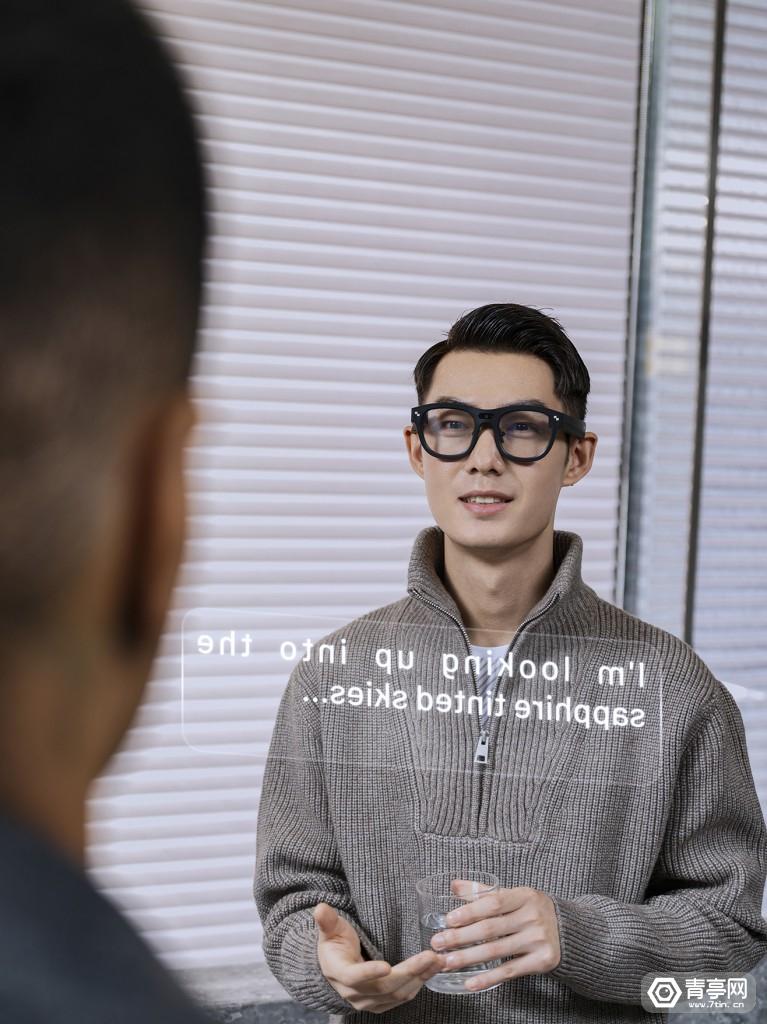
加入SLAM能力后,意味着雷鸟X2将可以实现更多虚实融合的场景。雷鸟创新开发的一个典型AR应用就是沉浸式的英语学习,这包括几方面:基于日常对话的语音转文字翻译、基于视觉识别的文字翻译,同时在内容层面结合了虚拟形象或外语环境或者外语对话模式,营造出一个沉浸式的英语/外语学习场景。
雷鸟X2
当然显示类的功能都能支持,例如导航、拍照、信息提示等等。不仅如此,视觉摄像头未来还可以完成基于手势的一些交互。

雷鸟X2
虽然现阶段应用少,但随着产品开售,开发者生态也会逐渐活跃起来。李宏伟表示:“雷鸟创新在开发者生态上分两块,一是BB系列产品已经比较领先,包括游戏、影视内容,还有自研游戏等;二是在雷鸟X2系列产品上,通过好的AR眼镜硬件、好用的开发者工具去展开合作,也会支持开放性的OpenXR标准。”
4,整机设计能力
整机设计能力对AR眼镜品牌来说至关重要,雷鸟X2依然采用一体机设计方案,因为骁龙XR2、视觉传感器的加入对整机结构设计、人机交互、散热等多方面提出了挑战。
尺寸上,雷鸟X2整体更接近普通眼镜,同时对鼻托、镜腿设计进行优化,目的是尽可能做到长时间佩戴的舒适性。同时,光引擎尺寸更小也有助于缩小镜腿左右两侧的体积,同时减少视野遮挡,保证自然的观感。
交互方面,内置骁龙XR2平台的雷鸟X2可以独立运行,通过内置的麦克风、扬声器可以通过语音助理完成导航、拍照等部分交互,同时镜腿一侧加入了触控区,通过物理的点击或滑动也能完成更多的操作模式。另外,本次雷鸟X2还加入了指环交互。
热管理方面,目前主要集中在通过软件上的降低运算功耗,同时硬件上优化散热结构,两个方面结合共同实现了不错的散热效果。
自研光引擎生产设备,推动量产
此前业内推出的MicroLED+光波导的AR眼镜几乎均为单色显示方案,而雷鸟X2重点强调双目全彩以及“可量产”,这可能大家会好奇这是如何做到的呢?
雷鸟X2的显示器件采用的是MicroLED面板,这部分虽然是源自于供应商,但考验的是光引擎方面的能力,单色和全彩的区别在于:单色方案光引擎设计相对更容易,全彩难度更高是因为,需要实现红、绿、蓝色三块MicroLED合色,这里面的难点在于光引擎的生产和制造,以及定制的衍射光波导模组的标定。

雷鸟X2
据青亭网了解,雷鸟X2的全彩方案光引擎是雷鸟创新完全自研,主要提升是体积缩小至0.7cc,屏幕升级为8bit,同时光效率也进行了进一步优化提升,意味着色彩表现更好,亮度最高可达到1000nits,这个亮度基本上可以满足日常使用环境。
前面提到,光引擎的作用之一是把三色面板的合色,而过程要保证对微米级别的像素对齐。雷鸟创新负责技术的同事表示:“当前没有既有方案能满足这一设计需求。”为了进一步提升生产良率,雷鸟创新从底层上研究工艺流程,开发出全自动的光引擎生产设备,实现了全彩光引擎高效率高良率的生产。
光波导方面则是源自于与供应商定制开发的产品,上一代是单层全息光波导,雷鸟X2改为了双层衍射光波导方案,在光效、和亮度色彩的均匀性方面表现会更好。相比来看,OPPO采用树脂光波导更侧重轻量化,但树脂结构在色彩和FOV会有妥协,而雷鸟X2在光波导选择上更注重色彩表现与整机入眼亮度。
综合来看就是,雷鸟创新在AR眼镜核心的光学模组上,光引擎完全自研,良率可控;同时MicroLED和定制的光波导模组良率也在逐渐提升,综合达到了一个比较高的良率,从整个光学模组推动量产的稳步进行。
双产品线策略,领跑国内消费级XR眼镜
上面更多提到的是最新的雷鸟X2,这会是一项长期的技术布局。在XR业务方向上,雷鸟已经通过雷鸟Air和雷鸟Air 1S两款MicroOLED+BirdBath眼镜,开始在消费级XR市场站稳脚跟。
雷鸟创新表示:根据京东和天猫平台的数据统计,2022年双十一期间,雷鸟Air系列产品在天猫+京东双平台AR品类合计的总销量/总销售额双第一,销售额环比618全周期483.86%。

雷鸟Air 1S
根据我体验雷鸟Air 1S来看,在视觉和佩戴体验等方面提升的同时,在内容生态加大布局,通过WebXR引入Sketchfab、720云、XGRIDS、爱奇艺AR等内容资源,大幅提升了内容丰富性和可玩性。
至此,雷鸟创新的两大产品线已经很明确:MicroLED+光波导的轻量化AR眼镜路径,以及BirdBath类产品,通过同时对前瞻性技术和成熟的技术布局策略在AR创业公司中是一个值得借鉴的模式。
李宏伟谈到:“之所以这样布局,是因为MicroLED+光波导是正确的方向,是未来真正的消费级AR眼镜。做BirdBath是考虑到技术相对成熟,可以通过该方案向特定场景提供特定的用户价值,也让我们持续有不错的销量,在市场上占据领先地位。”
总结来看,可以说在第一代雷鸟智能眼镜先锋版上,雷鸟创新将全彩MicroLED+光波导的方案进行了概念验证,而到了最新的雷鸟X2上大幅改进升级的同时,通过自研的光引擎设备、专利和软件算法的投入,初步解决了量产问题。据悉,雷鸟X2预计今年Q1将率先面向开发者、极客玩家开放购买,届时以雷鸟X2为首的双目全彩MicroLED+衍射光波导将成为下一代消费级AR眼镜的新起点。