目录
- 1.QAM的调制原理
- 2.QAM的解调原理
- 3.QAM代码
- 4.结果图
- 5.特点
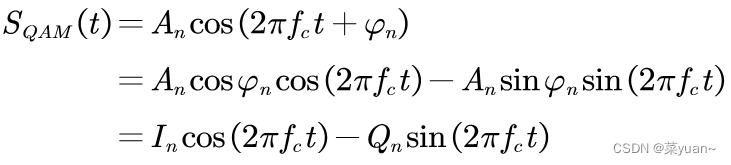
1.QAM的调制原理
QAM调制原理如下图所示,基带码元波形经过串并转换分成I、Q两路,然后再经过电平转换(00转换成-1,01转换成-3,10转换成1,11转换成3),再与对应的载波相乘,然后再相加完成QAM的调制。
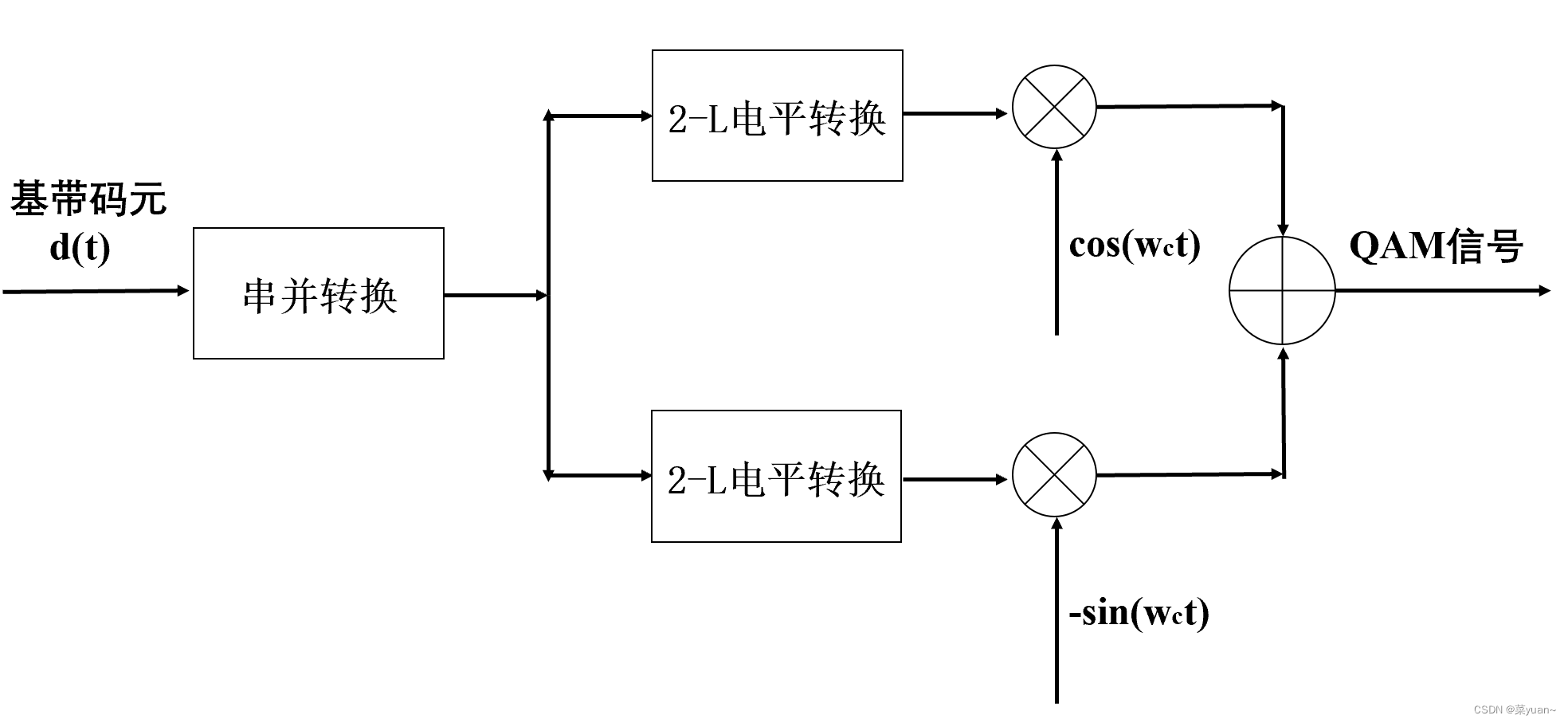
本次采用的是16QAM,M=16=2^k,因此k=4,
L=2^(k/2)=4
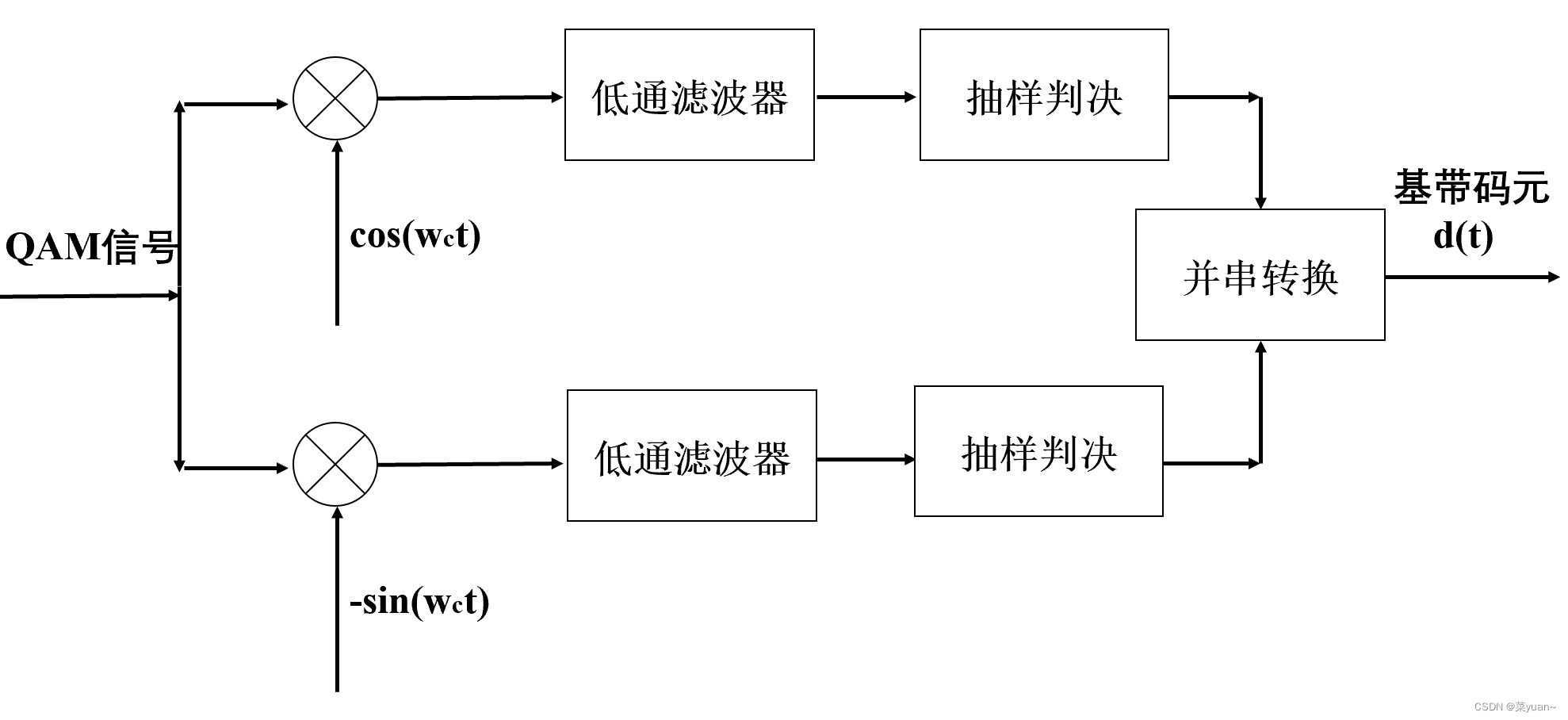
2.QAM的解调原理
QAM的解调原理如下图所示,QAM信号再分为I、Q两路和对应的载波相乘,然后经过低通滤波器后进行抽样判决,判决之后的I、Q路码元进行合并,I路为最终码元序列的奇数位置码元,Q路为最终码元序列的偶数位置码元,恢复出原始的码元序列。
3.QAM代码
clear all; % 清除所有变量
close all; % 关闭所有窗口
clc; % 清屏
%% 基本参数
M=40; % 产生码元数
L=100; % 每码元复制L次,每个码元采样次数
Ts=0.001; % 每个码元的宽度,即码元的持续时间
Rb=1/Ts; % 码元速率1K
dt=Ts/L; % 采样间隔
TotalT=M*Ts; % 总时间1
t=0:dt:TotalT-dt; % 时间1
TotalT2=(M/2)*Ts; % 总时间2
t2=0:dt:TotalT2-dt; % 时间2
Fs=1/dt; % 采样间隔的倒数即采样频率
%% 产生单极性波形
wave=randi([0,1],1,M); % 产生二进制随机码,M为码元个数
fz=ones(1,L); % 定义复制的次数L,L为每码元的采样点数
fz2=ones(1,2*L); % 定义复制的次数2L
x1=wave(fz,:); % 将原来wave的第一行复制L次,称为L*M的矩阵
jidai=reshape(x1,1,L*M); % 产生单极性不归零矩形脉冲波形,将刚得到的L*M矩阵,按列重新排列形成1*(L*M)的矩阵
%% 产生I、Q路码元
a=wave(1:2:end); % I路码元是原始码元奇数位置的码元
b=wave(2:2:end); % Q路码元是原始码元偶数位置的码元
% 码元电平转换,要将两两码元转换成四种电平,00转换成-1,01转换成-3,10转换成1,11转换成3
for i=1:length(a)/2
if a(2*(i-1)+1:2*i)==[0 1]
I(i)=-3;
elseif a(2*(i-1)+1:2*i)==[0 0]
I(i)=-1;
elseif a(2*(i-1)+1:2*i)==[1 0]
I(i)=1;
elseif a(2*(i-1)+1:2*i)==[1 1]
I(i)=3;
end
if b(2*(i-1)+1:2*i)==[0 1]
Q(i)=-3;
elseif b(2*(i-1)+1:2*i)==[0 0]
Q(i)=-1;
elseif b(2*(i-1)+1:2*i)==[1 0]
Q(i)=1;
elseif b(2*(i-1)+1:2*i)==[1 1]
Q(i)=3;
end
end
x2=a(fz,:); % 将原来a的第一行复制L次,称为L*(M/2)的矩阵
a_mayuan=reshape(x2,1,L*(M/2));% 产生单极性不归零矩形脉冲波形,将刚得到的L*(M/2)矩阵,按列重新排列形成1*(L*(M/2))的矩阵
x3=b(fz,:); % 将原来b的第一行复制L次,称为L*(M/2)的矩阵
b_mayuan=reshape(x3,1,L*(M/2));% 产生单极性不归零矩形脉冲波形,将刚得到的L*(M/2)矩阵,按列重新排列形成1*(L*(M/2))的矩阵
x4=I(fz2,:); % 将原来I的第一行复制2L次,称为2L*(M/4)的矩阵
I_mayuan=reshape(x4,1,(2*L)*(M/4));% 产生单极性不归零矩形脉冲波形,将刚得到的(2*L)*(M/4)矩阵,按列重新排列形成1*((2*L)*(M/4))的矩阵
x5=Q(fz2,:); % 将原来Q的第一行复制2L次,称为2L*(M/4)的矩阵
Q_mayuan=reshape(x5,1,(2*L)*(M/4));% 产生单极性不归零矩形脉冲波形,将刚得到的(2*L)*(M/4)矩阵,按列重新排列形成1*((2*L)*(M/4))的矩阵
%% 码元波形绘制
figure(1); % 绘制第1幅图
subplot(511); % 窗口分割成5*1的,当前是第1个子图
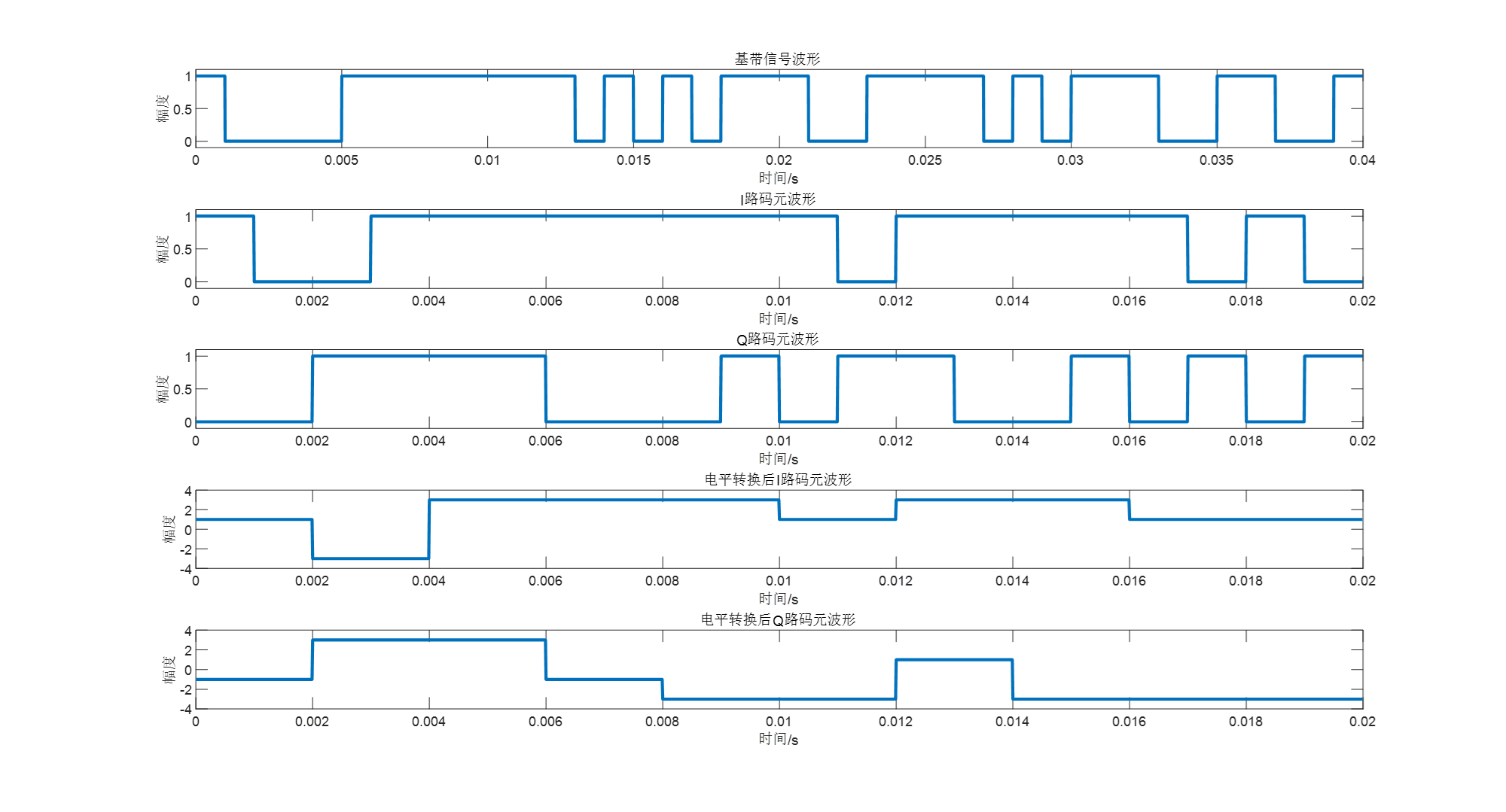
plot(t,jidai,'LineWidth',2);% 绘制基带码元波形,线宽为2
title('基带信号波形'); % 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
axis([0,TotalT,-0.1,1.1]) % 坐标范围限制
subplot(512); % 窗口分割成5*1的,当前是第2个子图
plot(t2,a_mayuan,'LineWidth',2);% I路码元波形,线宽为2
title('I路码元波形'); % 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
axis([0,TotalT2,-0.1,1.1]) % 坐标范围限制
subplot(513); % 窗口分割成5*1的,当前是第3个子图
plot(t2,b_mayuan,'LineWidth',2);% 绘制Q路码元波形,线宽为2
title('Q路码元波形'); % 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
axis([0,TotalT2,-0.1,1.1]) % 坐标范围限制
subplot(514); % 窗口分割成5*1的,当前是第4个子图
plot(t2,I_mayuan,'LineWidth',2);% 绘制转换后I路电平波形,线宽为2
title('电平转换后I路码元波形');% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
axis([0,TotalT2,-4,4]) % 坐标范围限制
subplot(515); % 窗口分割成5*1的,当前是第5个子图
plot(t2,Q_mayuan,'LineWidth',2);% 绘制转换后Q路电平波形,线宽为2
title('电平转换后Q路码元波形');% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
axis([0,TotalT2,-4,4]) % 坐标范围限制
%% QAM调制
fc=10000; % 载波频率2kHz
zb1=cos(2*pi*fc*t2); % 载波1
zb2=-sin(2*pi*fc*t2); % 载波2
I_lu=I_mayuan.*zb1; % I路波形
Q_lu=Q_mayuan.*zb2; % Q路波形
qam=I_lu+Q_lu; % QAM调制
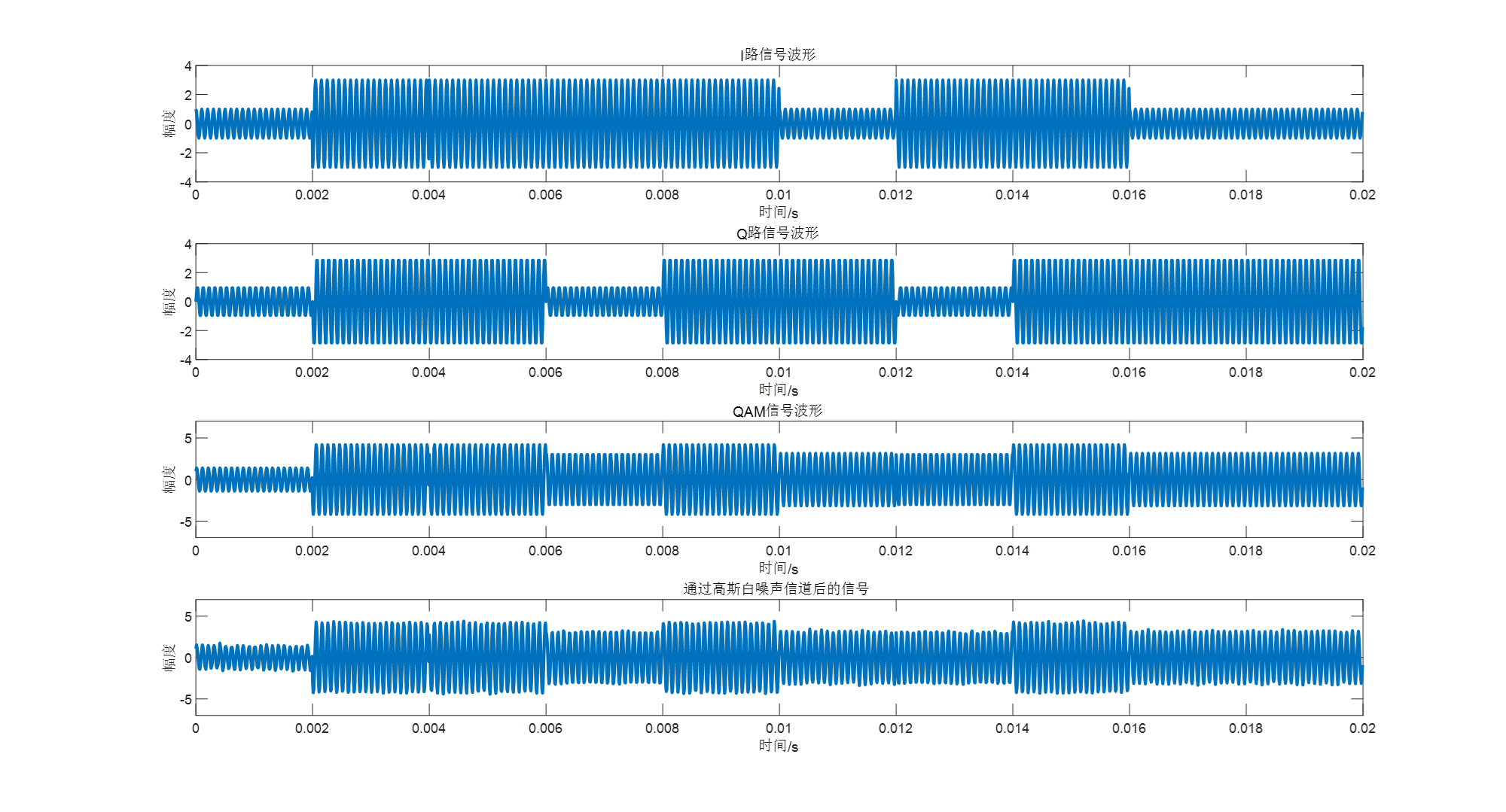
figure(2); % 绘制第2幅图
subplot(411) % 窗口分割成4*1的,当前是第1个子图
plot(t2,I_lu,'LineWidth',2);% 绘制I路的波形
title('I路信号波形') % 标题
axis([0,TotalT2,-4,4]); % 坐标范围限制
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(412) % 窗口分割成4*1的,当前是第2个子图
plot(t2,Q_lu,'LineWidth',2);% 绘制Q路的波形
title('Q路信号波形') % 标题
axis([0,TotalT2,-4,4]); % 坐标范围限制
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(413) % 窗口分割成4*1的,当前是第3个子图
plot(t2,qam,'LineWidth',2); % 绘制QAM的波形
title('QAM信号波形') % 标题
axis([0,TotalT2,-7,7]); % 坐标范围限制
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
%% 信号经过高斯白噪声信道
tz=awgn(qam,20); % 信号qam中加入白噪声,信噪比为SNR=20dB
subplot(414); % 窗口分割成4*1的,当前是第4个子图
plot(t2,tz,'LineWidth',2); % 绘制QAM信号加入白噪声的波形
axis([0,TotalT2,-7,7]); % 坐标范围设置
title('通过高斯白噪声信道后的信号');% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
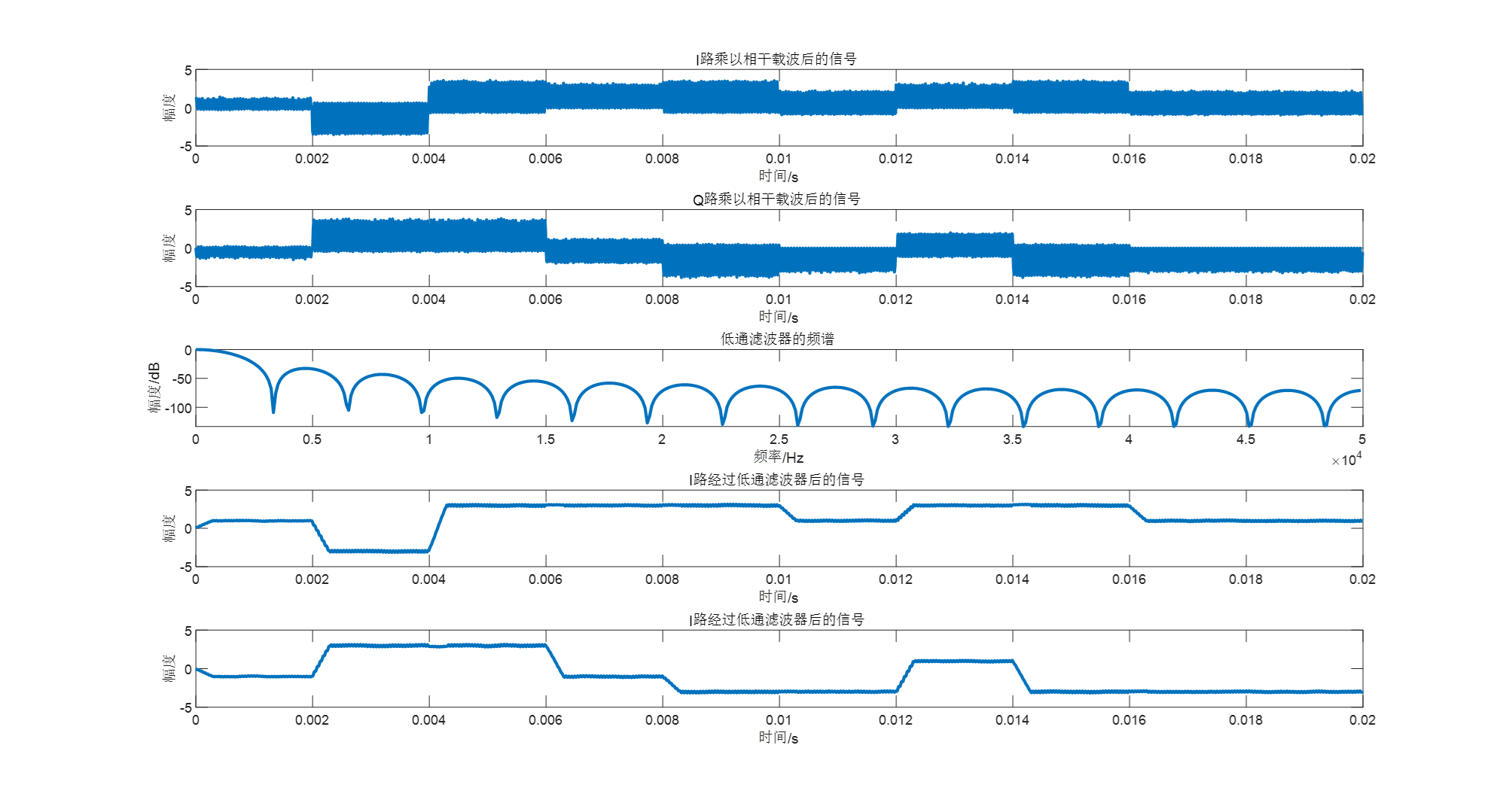
%% 解调部分
jt1=tz.*zb1; % 相干解调,I路乘以相干载波
jt2=tz.*zb2; % 相干解调,Q路乘以相干载波
figure(3);
subplot(511) % 窗口分割成5*1的,当前是第1个子图
plot(t2,jt1,'LineWidth',2) % 绘制I路乘以相干载波后的信号
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("I路乘以相干载波后的信号")% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(512) % 窗口分割成5*1的,当前是第2个子图
plot(t2,jt2,'LineWidth',2) % 绘制Q路乘以相干载波后的信号
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("Q路乘以相干载波后的信号")% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
%% 加噪信号经过滤波器
% 低通滤波器设计
fp=2*Rb; % 低通滤波器截止频率,乘以2是因为下面要将模拟频率转换成数字频率wp=Rb/(Fs/2)
b=fir1(30, fp/Fs, boxcar(31));% 生成fir滤波器系统函数中分子多项式的系数
% fir1函数三个参数分别是阶数,数字截止频率,滤波器类型
% 这里是生成了30阶(31个抽头系数)的矩形窗滤波器
[h,w]=freqz(b, 1,512); % 生成fir滤波器的频率响应
% freqz函数的三个参数分别是滤波器系统函数的分子多项式的系数,分母多项式的系数(fir滤波器分母系数为1)和采样点数(默认)512
lvbo1=2*fftfilt(b,jt1); % 对信号进行滤波,jt1是等待滤波的信号,b是fir滤波器的系统函数的分子多项式系数
lvbo2=2*fftfilt(b,jt2); % 对信号进行滤波,jt2是等待滤波的信号,b是fir滤波器的系统函数的分子多项式系数
subplot(513); % 窗口分割成5*1的,当前是第3个子图
plot(w/pi*Fs/2,20*log(abs(h)),'LineWidth',2); % 绘制滤波器的幅频响应
title('低通滤波器的频谱'); % 标题
xlabel('频率/Hz'); % x轴标签
ylabel('幅度/dB'); % y轴标签
subplot(514) % 窗口分割成5*1的,当前是第4个子图
plot(t2,lvbo1,'LineWidth',2);% 绘制I路经过低通滤波器后的信号
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("I路经过低通滤波器后的信号");% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(515) % 窗口分割成5*1的,当前是第5个子图
plot(t2,lvbo2,'LineWidth',2);% 绘制Q路经过低通滤波器后的信号
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("I路经过低通滤波器后的信号");% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
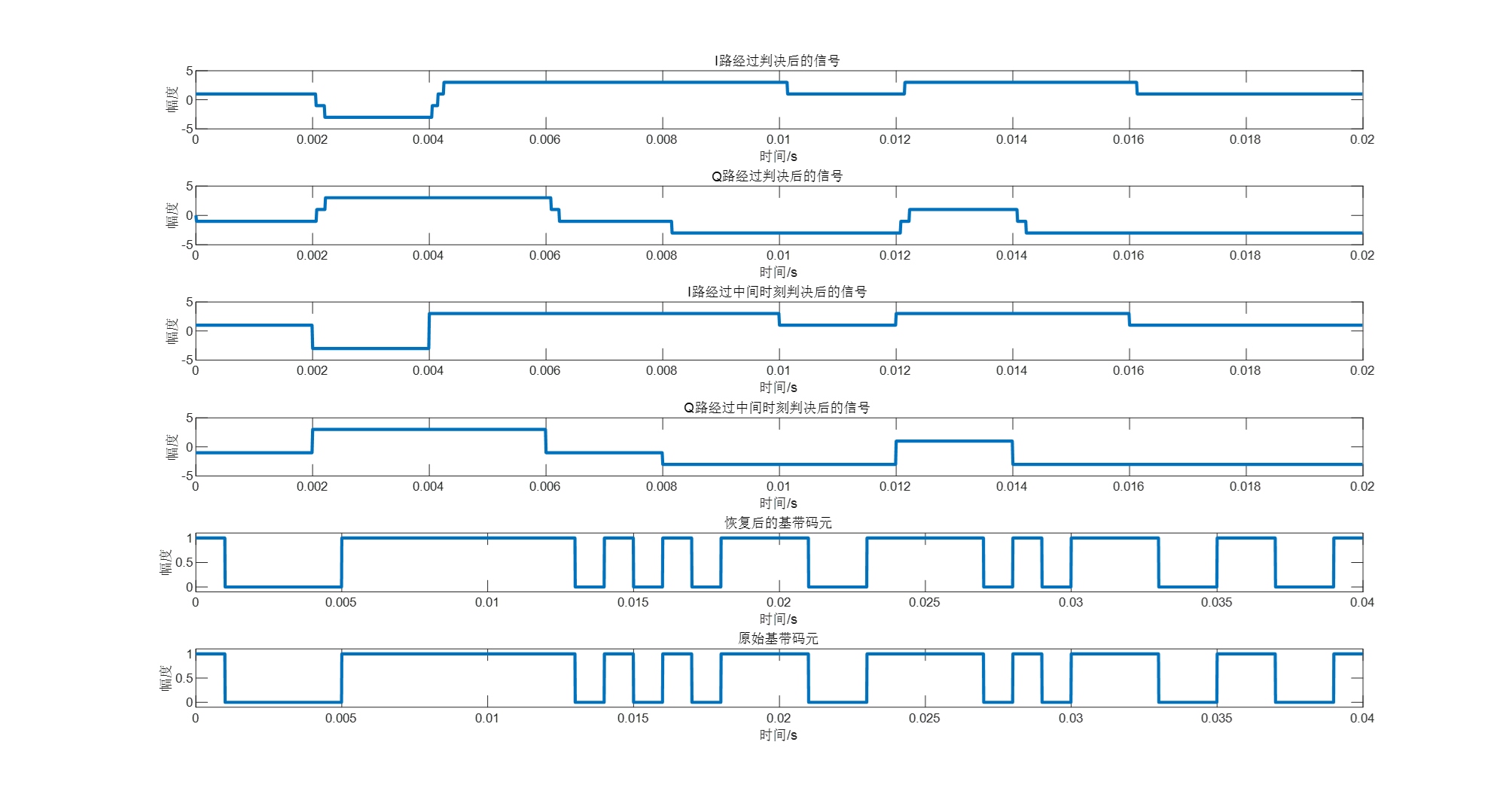
%% 抽样判决
% 滤波后的波形进行判决,大于2的判决为3,0-2之间的判决为1,-2-0之间判决为-1,小于-2的判决为-3
for j=1:length(lvbo1)
if lvbo1(j)>=2
I_panjue(j)=3;
elseif (lvbo1(j)>0 && lvbo1(j)<2)
I_panjue(j)=1;
elseif (lvbo1(j)>=-2 && lvbo1(j)<0)
I_panjue(j)=-1;
elseif lvbo1(j)<-2
I_panjue(j)=-3;
end
end
for k=1:length(lvbo2)
if lvbo2(k)>=2
Q_panjue(k)=3;
elseif (lvbo2(k)>0 && lvbo2(k)<2)
Q_panjue(k)=1;
elseif (lvbo2(k)>=-2 && lvbo2(k)<0)
Q_panjue(k)=-1;
elseif lvbo2(k)<-2
Q_panjue(k)=-3;
end
end
figure(4);
subplot(611) % 窗口分割成6*1的,当前是第1个子图
plot(t2,I_panjue,'LineWidth',2);% 绘制经过判决的I路信号
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("I路经过判决后的信号");% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(612) % 窗口分割成6*1的,当前是第2个子图
plot(t2,Q_panjue,'LineWidth',2);% 绘制经过判决的Q路信号
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("Q路经过判决后的信号");% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
%% 判决之后再处理,取码元中间时刻判决
I_zong=[];
Q_zong=[];
for m=L:2*L:((2*L)*(M/4))
if I_panjue(m)>=2
I_zong=[I_zong,3];
elseif (I_panjue(m)>0 && I_panjue(m)<2)
I_zong=[I_zong,1];
elseif (I_panjue(m)>=-2 && I_panjue(m)<0)
I_zong=[I_zong,-1];
elseif I_panjue(m)<-2
I_zong=[I_zong,-3];
end
end
for n=L:2*L:((2*L)*(M/4))
if Q_panjue(n)>=2
Q_zong=[Q_zong,3];
elseif (Q_panjue(n)>0 && Q_panjue(n)<2)
Q_zong=[Q_zong,1];
elseif (Q_panjue(n)>=-2 && Q_panjue(n)<0)
Q_zong=[Q_zong,-1];
elseif Q_panjue(n)<-2
Q_zong=[Q_zong,-3];
end
end
x6=I_zong(fz2,:); % 将原来I_zong的第一行复制2L次,称为2L*(M/4)的矩阵
I_wave=reshape(x6,1,(2*L)*(M/4));% 产生单极性不归零矩形脉冲波形,将刚得到的(2*L)*(M/4)矩阵,按列重新排列形成1*((2*L)*(M/4))的矩阵
x7=Q_zong(fz2,:); % 将原来Q_zong的第一行复制2L次,称为2L*(M/4)的矩阵
Q_wave=reshape(x7,1,(2*L)*(M/4));% 产生单极性不归零矩形脉冲波形,将刚得到的(2*L)*(M/4)矩阵,按列重新排列形成1*((2*L)*(M/4))的矩阵
subplot(613) % 窗口分割成6*1的,当前是第3个子图
plot(t2,I_wave,'LineWidth',2);% 绘制经过中间时刻判决的I路波形
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("I路经过中间时刻判决后的信号");% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(614) % 窗口分割成6*1的,当前是第4个子图
plot(t2,Q_wave,'LineWidth',2);% 绘制经过中间时刻判决的Q路波形
axis([0,TotalT2,-5,5]); % 设置坐标范围
title("Q路经过中间时刻判决后的信号");% 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
%% I、Q两路恢复
% 电平转换成码元,-3转换成01,-1转换成00,1转换成10,3转换成11
I_yuan=[];
Q_yuan=[];
for i=1:length(I_zong)
if I_zong(i)==3
I_yuan=[I_yuan,1 1];
elseif I_zong(i)==1
I_yuan=[I_yuan,1 0];
elseif I_zong(i)==-1
I_yuan=[I_yuan,0 0];
elseif I_zong(i)==-3
I_yuan=[I_yuan,0 1];
end
end
for i=1:length(Q_zong)
if Q_zong(i)==3
Q_yuan=[Q_yuan,1 1];
elseif Q_zong(i)==1
Q_yuan=[Q_yuan,1 0];
elseif Q_zong(i)==-1
Q_yuan=[Q_yuan,0 0];
elseif Q_zong(i)==-3
Q_yuan=[Q_yuan,0 1];
end
end
code = [];
% 将I路码元为最终输出的奇数位置码元,将Q路码元为最终输出的偶数位置码元
for n=1:M
if mod(n, 2)~=0
code = [code, I_yuan((n+1)/2)];
else
code = [code, Q_yuan(n/2)];
end
end
x8=wave(fz,:); % 将原来wave的第一行复制L次,称为L*M的矩阵
dout=reshape(x8,1,L*M); % 产生单极性不归零矩形脉冲波形,将刚得到的L*M矩阵,按列重新排列形成1*(L*M)的矩阵
subplot(615) % 窗口分割成6*1的,当前是第5个子图
plot(t,dout,'LineWidth',2); % 绘制恢复后的基带码元
axis([0,TotalT,-0.1,1.1]); % 设置坐标范围
title("恢复后的基带码元"); % 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
subplot(616) % 窗口分割成6*1的,当前是第6个子图
plot(t,jidai,'LineWidth',2);% 绘制原始基带码元
axis([0,TotalT,-0.1,1.1]); % 设置坐标范围
title("原始基带码元"); % 标题
xlabel('时间/s'); % x轴标签
ylabel('幅度'); % y轴标签
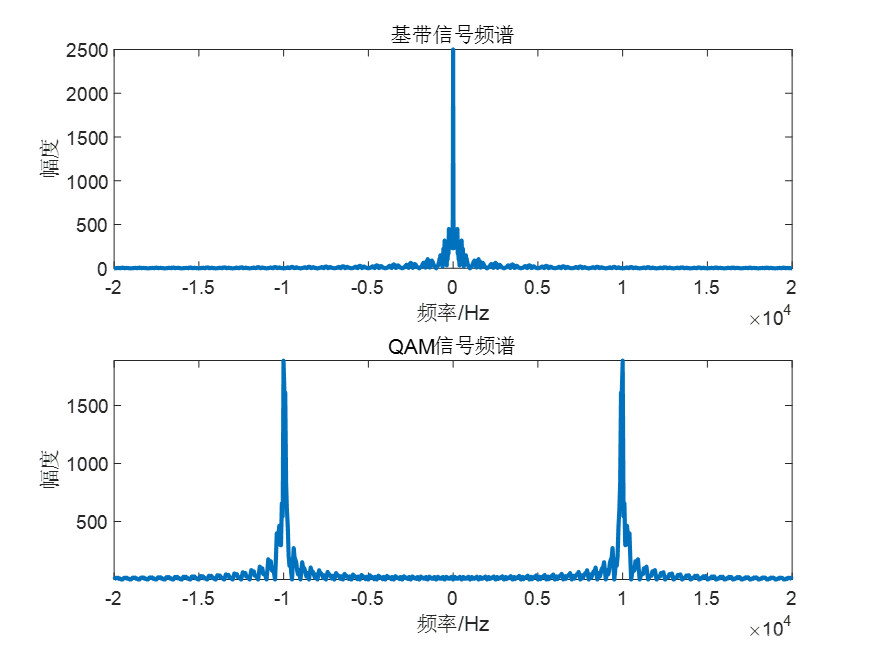
%% 绘制频谱
%% 信源频谱
T=t(end); % 时间
df=1/T; % 频谱分辨率
N=length(jidai); % 采样长度
f=(-N/2:N/2-1)*df; % 频率范围
mf=fftshift(abs(fft(jidai)));%对信源信号采用快速傅里叶变换并移到矩阵中心
figure(5);
subplot(211); % 窗口分割成2*1的,当前是第1个子图
plot(f,mf,'LineWidth',2); % 绘制信源频谱波形
title("基带信号频谱"); % 标题
xlabel('频率/Hz'); % x轴标签
ylabel('幅度'); % y轴标签
axis([-20000,20000,-inf,inf]);% 坐标范围限制
%% QAM信号频谱
T2=t2(end); % 时间2
df2=1/T2; % 频谱分辨率2
N2=length(qam); % 采样长度2
f2=(-N2/2:N2/2-1)*df2; % 频率范围2
sf=fftshift(abs(fft(qam))); % 对QAM信号采用快速傅里叶变换并将0-fs频谱移动到-fs/2-fs/2
subplot(212) % 窗口分割成2*1的,当前是第2个子图
plot(f2,sf,'LineWidth',2) % 绘制QAM调制信号频谱
title("QAM信号频谱") % 标题
xlabel('频率/Hz'); % x轴标签
ylabel('幅度'); % y轴标签
axis([-20000,20000,-inf,inf]);% 坐标范围限制
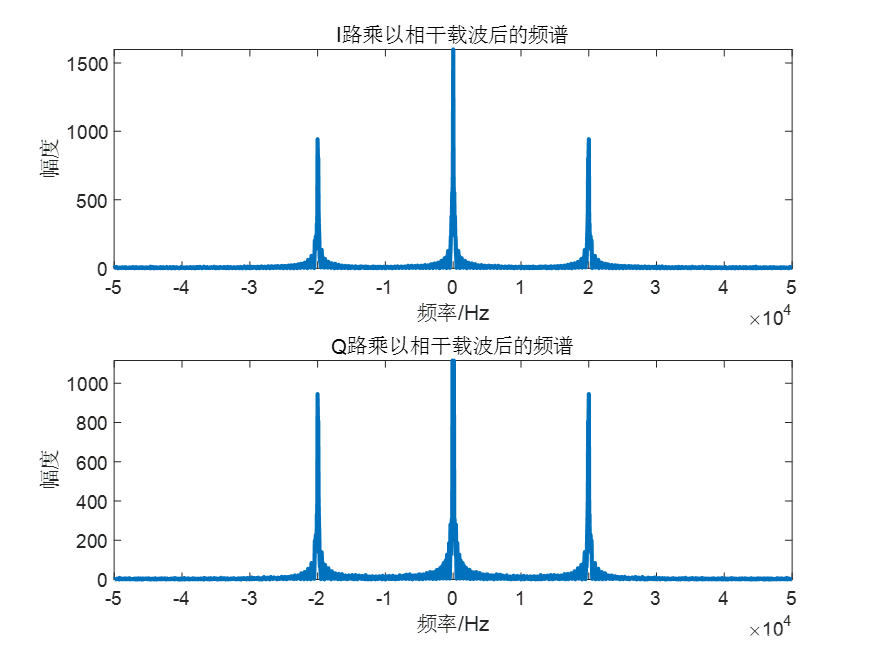
%% 乘以相干载波后的频谱
mmf=fftshift(abs(fft(jt1))); % 对相干载波信号采用快速傅里叶变换并移到矩阵中心
figure(6) % 绘制第5幅图
subplot(211); % 窗口分割成2*1的,当前是第1个子图
plot(f2,mmf,'LineWidth',2) % 画出I路乘以相干载波后的频谱
title("I路乘以相干载波后的频谱")
xlabel('频率/Hz'); % x轴标签
ylabel('幅度'); % y轴标签
mmf2=fftshift(abs(fft(jt2))); % 对相干载波信号采用快速傅里叶变换并移到矩阵中心
subplot(212); % 窗口分割成2*1的,当前是第2个子图
plot(f2,mmf2,'LineWidth',2) % 画出Q路乘以相干载波后的频谱
title("Q路乘以相干载波后的频谱")
xlabel('频率/Hz'); % x轴标签
ylabel('幅度'); % y轴标签
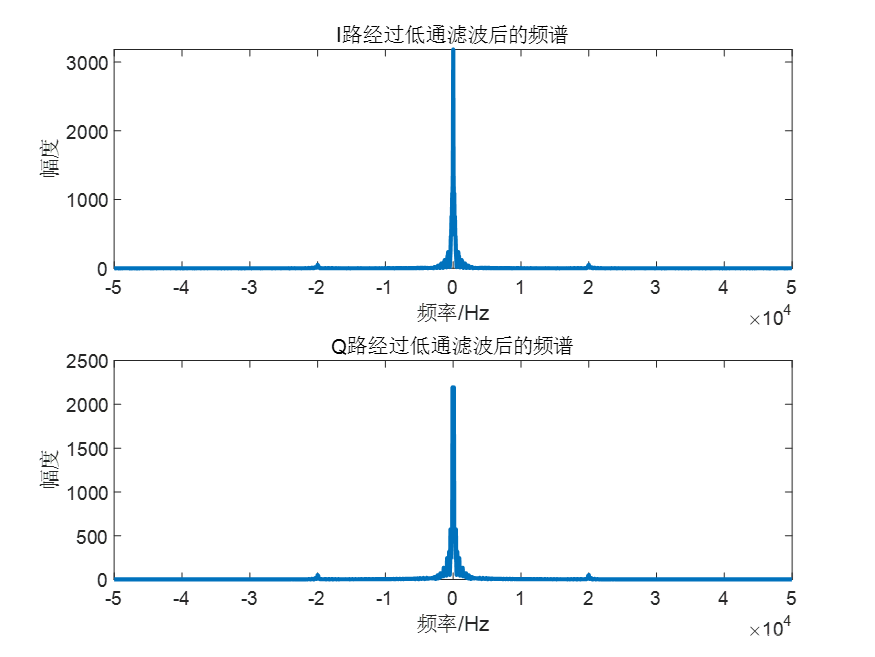
%% 经过低通滤波后的频谱
dmf=fftshift(abs(fft(lvbo1)));%对低通滤波信号采用快速傅里叶变换并移到矩阵中心
figure(7);
subplot(211); % 窗口分割成2*1的,当前是第1个子图
plot(f2,dmf,'LineWidth',2) % 画出I路经过低通滤波后的频谱
title("I路经过低通滤波后的频谱");
xlabel('频率/Hz'); % x轴标签
ylabel('幅度'); % y轴标签
dmf2=fftshift(abs(fft(lvbo2)));%对低通滤波信号采用快速傅里叶变换并移到矩阵中心
subplot(212); % 窗口分割成2*1的,当前是第2个子图
plot(f2,dmf2,'LineWidth',2) % 画出Q路经过低通滤波后的频谱
title("Q路经过低通滤波后的频谱");
xlabel('频率/Hz'); % x轴标签
ylabel('幅度'); % y轴标签
4.结果图
5.特点
系统的频带利用率高,高速传输。