Cesium 目前支持的影像切片规范有两种形式的:
1.经纬度直拉切片方式 (GeographicTilingScheme ),
2.web 墨卡托切片方式 (WebMercatorTilingScheme)。
根据常规传统,瓦片大小都是 256,但是事实上瓦片大小可以设置非 256,比如 512,这样做的目的可以在大屏上减少瓦片的请求次数。对于不同的投影参数,投影级别和精度在不同的瓦片大小下也会有不同。
墨卡托的投影级别和精度:

256 瓦片大小的 web 墨卡托切片
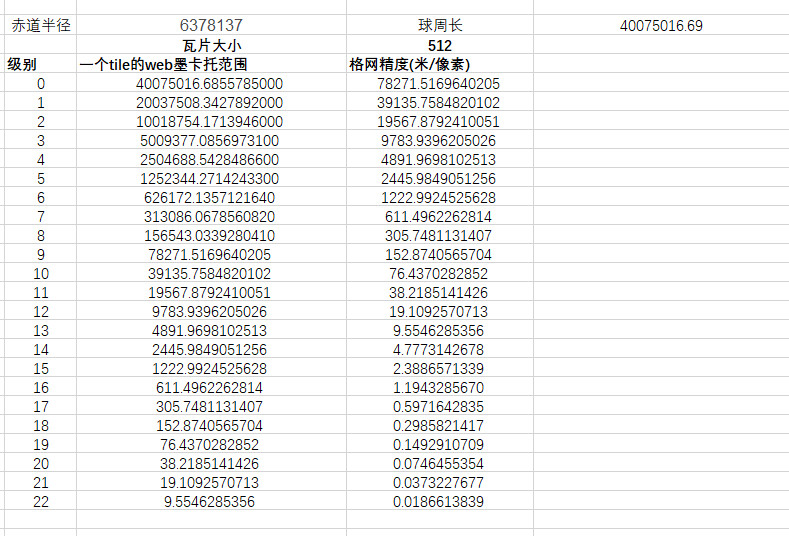
512 瓦片大小的 web 墨卡托切片

1024 瓦片大小的web 墨卡托切片
经纬度的投影级别和精度:

256 瓦片大小经纬度切片
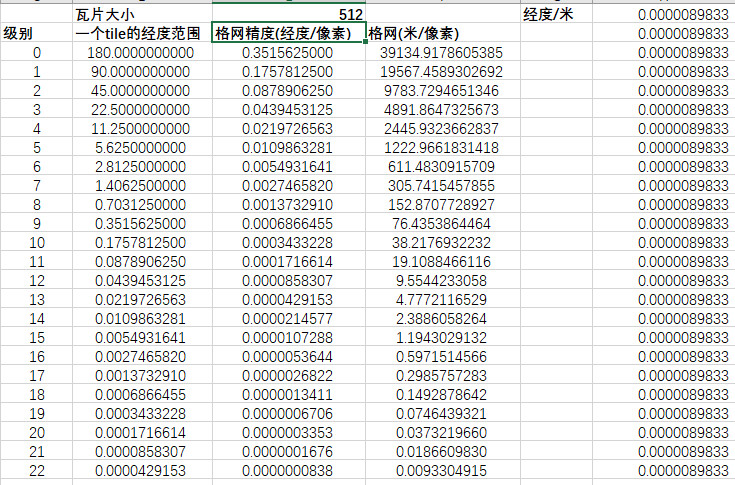
512 瓦片大小经纬度切片
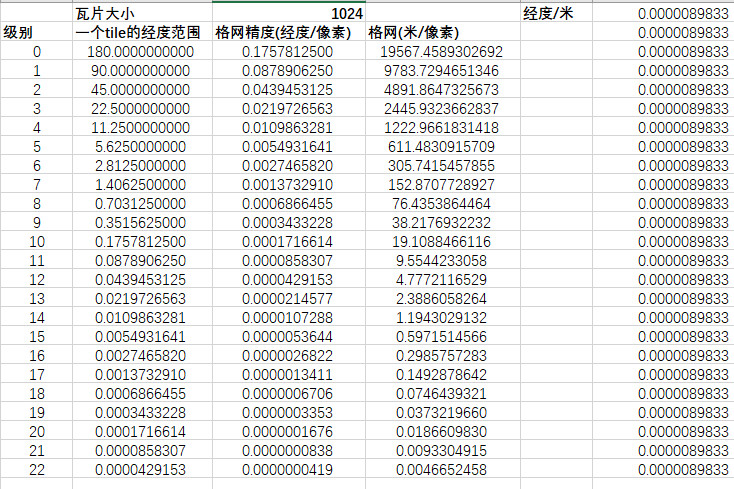
1024 瓦片大小经纬度切片