这是AUTOSAR网络管理梳理的第二篇文章,主要讲解AUTOSAR网络管理的相关参数。第一篇链接【01 AUTOSAR网络管理基础】。
相关参数有很多,我挑了一些相对重要的参数,分三部分进行讲解:
第一部分:比较常用,且关乎到AUTOSAR网络管理各个状态之间的流转,个人觉得相对重要些,所以单独整理出来。
第二部分:相对比较少用。其中Coordinator相关功能,一般GW节点才可能会用上,所以普通节点用得相对比较少。
第三部分:AUTOSAR标准文档里未找到相关参数,但实际应用中会用的一些参数。
第一部分:网络管理状态机流转主要参数
CanNm的参数有很多,如下八个参数,关乎到AUTOSAR网络管理各个状态之间的流转,个人觉得相对常用/重要些,所以单独整理出来,分别为:
-
CanNmMsgCycleTime
-
CanNmImmediateNmCycleTime
-
CanNmImmediateNmTransmissions
-
CanNmRepeatMessageTime
-
CanNmTimeOutTime
-
CanNmWaitBusSleepTime
-
CanNmRemoteSleepIndTime
-
CanNmMsgTimeoutTime
以上这些参数,均在AUTOSAR_SWS_CANNetworkManagement.pdf文档中有详细描述。
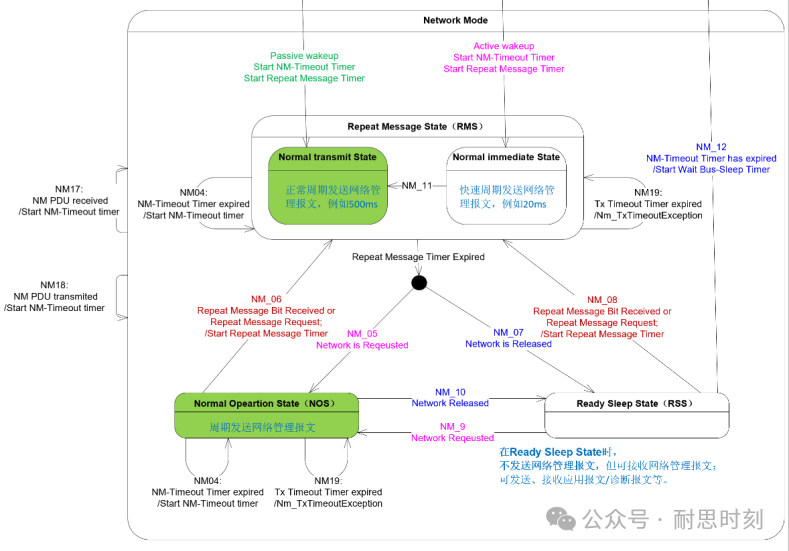
如上8个参数,我结合AUTOSAR网络管理状态机,整理成一个AUTOSAR网络管理的时序图,具体如下。
大家可结合每个参数的详细描述来进行理解。

1.1、CanNmMsgCycleTime:
如下两种情况,网络管理报文的发送周期为CanNmMsgCycleTime。
1) NM网络模式中的RMS状态的正常发送子状态下,网络管理报文发送周期。
2) NM网络模式中的NOS状态下,网络管理报文发送周期。
即当NM处理下图这两个标绿色背景的状态时,则NM报文以CanNmMsgCycleTime进行发送。
一般设置为500ms或1000ms,具体以OEM要求为准。
Network Management PDU的传输周期通常由定时参数CanNmMsgCycleTime决定。
注意:对于同一个网络管理集群中的所有NM节点,该参数必须相等。
若网络管理集群的成员数量较多,则可能将导致总线负荷过大。
故AUTOSAR网络管理引入了CanNmMsgCycleOffset与CanNmMsgReducedTime两个参数,分别用途如下:
CanNmMsgCycleOffset主要用来防止突发,
CanNmMsgReducedTime主要用来降低CAN总线负荷。
这两个参数第二部分,再详细展开说明。
1.2、CanNmImmediateNmCycleTime:
当节点处于NM网络模式中RMS状态的快速发送子状态时,网络管理报文发送周期。
一般设置为20ms,具体以OEM要求为准。
1.3、CanNmImmediateNmTransmissions
当节点处于RMS状态的的快速发送子状态时, 节点使用T_NM_ImmediateCycleTime为周期发送网络管理报文的数量。
一般设置为5次或10次,具体以OEM要求为准。

即网络唤醒时,网络管理以周期CanNmImmediateNmCycleTime进行报文发送,共发送CanNmImmediateNmTransmissions次,之后再切换为以CanNmMsgCycleTime为周期进行发送。
如果CanNmImmediateNmTransmissions取值为0,则当网络唤醒时,不会以T_NM_ImmediateCycleTime为周期立即发送NM PDU,而是一直以CanNmMsgCycleTime为周期进行发送。
该参数设置为非0时,若网络从休眠状态唤醒,则主动唤醒的节点会快速发出多个网络管理报文,这样可以让总线上的其他节点,更快速、更稳定的被唤醒,所以一般网络管理都会使用该参数。
dependency要求:
1) If CanNmImmediateRestartEnabled = true then CanNmImmediateNmTransmissions = 0
2) If CanNmPnHandleMultipleNetworkRequests == True" then "CanNmImmediateNmTransmissions > 0
1.4、CanNmRepeatMessageTime
描述了节点在RMS重复报文状态(Repeat Message State)中持续的时间。
dependency要求:
1) CanNmRepeatMessageTime = n * CanNmMsgCycleTime;
2) CanNmRepeatMessageTime > CanNmImmediateNmTransmissions * CanNmImmediateNmCycleTime
一般应该等于:n * CanNmMsgCycleTime,其中n表示在重复消息状态下正常发送的NM PDU的数量。
若取值为0,则表示没有配置重复消息状态。这意味着重复消息状态是暂时的,这意味着它在进入后立即离开,因此不保证启动的稳定性,也无法进行节点检测过程。
当网络管理状态机进入Repeat Message State状态时, 网络管理报文Byte1(Control Bit Vector)中的Bit0: Repeat Message Request则置为1,并启动计时。当计时到达后,重新切换到Normal Operation State。
任一网络管理节点接收到该网络管理报文时,均会进入Repeat Message State,并启动计时。当计时到达后,重新切换到Normal Operation State。
具体如下图示例:
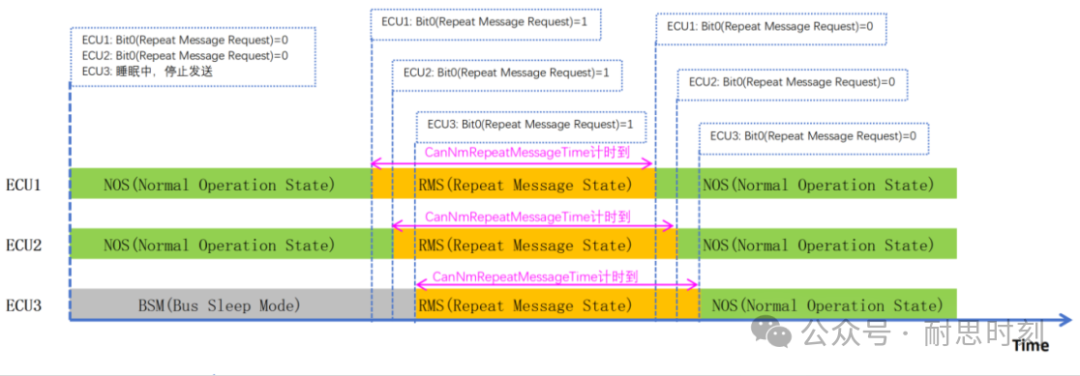
网络管理报文Byte1(Control Bit Vector)中的Bit0: Repeat Message Request不是必须支持的,具体看OEM要求。
1.5、CanNmTimeoutTime
描述了节点在NM网络模式(Network Mode)的超时阈值。
即,在NM网络模式中的准备睡眠状态(Ready Sleep State)时,若持续CanNmTimeoutTime(即状态机中的Nm-Timeout)未接收网络管理报文,则该定时器超时, 然后节点进入准备总线睡眠模式(Prepare Bus Sleep Mode)。
dependency要求:
1) CanNmTimeoutTime > CanNmMsgCycleTime 对于网络管理集群中的所有节点,该参数应该是相等的。
2) CanNmTimeoutTime > CanNmMsgCycleTime
如果无本地网络请求,并且总线上没有接收到Network Management PDUs的时间达CanNmTimeoutTime + CanNmWaitBusSleepTime,那么应该执行转换到Bus-Sleep Mode。
网管集群中的所有网络节点都要配置相同的CanNmTimeoutTime和 CanNmWaitBusSleepTime,故网络管理集群的所有节点,会大约同时执行向Bus-Sleep Mode的转换。
1.6、CanNmWaitBusSleepTime
它表示NM在转换到Bus-Sleep Mode之前,在Prepare Bus-Sleep Mode中停留的时间。
网络管理集群中的所有节点的参数dependency都需相等。且应该足够长,以使所有的Tx缓冲区为空。
1.7、CanNmRemoteSleepIndTime
远程睡眠指示超时。它以秒为单位定义了识别所有其他节点准备休眠所需的时间。
如果在CanNmRemoteSleepIndTime时间内,没有收到处于NOS状态的Network Management PDU,则CanNm模块将调用回调函数Nm_RemoteSleepIndication。即CanNm通知Nm模块:本CanNM的所有节点已进入RSS状态。
如果此时节点又收到了其他节点发送的处于NOS状态的网络管理报文,应该再调用Nm_RemoteSleepCancellation()函数通知应用层取消之前的指示。
dependency要求:
1) 要求CanNmRemoteSleepIndTime ≥ CanNmMsgCycleTime
2) 仅当CanNmRemoteSleepIndEnabled = true,该参数CanNmRemoteSleepIndTime才有效
1.8、CanNmMsgTimeoutTime
当调用发送接口(CanIf_Transmit)发 送NM PDU时,启动该定时器,
当NM PDU发送完成后(并调用 CanNm_TxConfirmation),则停止该定时器。
如果CanNmGlobalPnSupport设置为TRUE,并且定义了CanNmMsgTimeoutTime,并且CanNm请求发送一个NM PDU(调用CanIf_Transmit),则CanNm将以CanNmMsgTimeoutTime开始NM Message Tx Timeout Timer。
如果将CanNmGlobalPnSupport设置为TRUE,定义了CanNmMsgTimeoutTime并调用了CanNm_TxConfirmation,则CanNm将停止NM Message Tx Timeout Timer
要求如下:
1) 当使用Partial Network并且定义了这个超时时间时,则CanNm监视在此传输超时时间内成功传输的NM-PDU,否则提供错误通知。
2) CanNmMsgTimeoutTime < CanNmMsgCycleTime
3) 仅当“CanNmPassiveModeEnabled”和“CanNmImmediateTxConfEnabled”设置为“FALSE”,“CanNmPnEnabled”设置为“TRUE”时,此参数才有效。
第二部分:其他AUTOSAR参数
第二部分:相对比较少用。其中Coordinator相关功能,一般GW节点才可能会用上。
主要列了如下三个参数:
1、CanNmMsgCycleOffset
2、CanNmMsgReducedTime
3、NMGlobalCoordinatorTime
2.1、CanNmMsgCycleOffset:
参数CanNmMsgCycleOffset的作用,主要用来防止报文突发。
如果不是通过CanNm_NetworkRequest或CanNmImmediateNmTransmissions=0这两种方式进入Repeat Message State,则进入Repeat Message State后,NM PDU将会延时CanNmMsgCycleOffset发出。
如下两种情况:不允许使用参数CanNmMsgCycleOffset:
1) 当由于CanNm_NetworkRequest() (active wakeup)而从Bus Sleep Mode或Prepare Bus Sleep Mode进入Repeat Message状态时,如果CanNmImmediateNmTransmissions的值大于零,则NM PDU将使用CanNmImmediateNmCycleTime作为周期时间进行传输。应尽快触发第一个NM PDU的发送。发送完成后,报文周期计时器(Message Cycle Timer)将被重新加载为CanNmImmediateNmCycleTime。 在这种情况下,不能使用CanNmMsgCycleOffset。
2) 如果CanNmPnHandleMultipleNetworkRequests设置为TRUE,则CanNm_NetworkRequest将触发从Network Mode到Repeat Message state的状态转换。如果使能了PDU transmission能力,则发送的NM PDU使用CanNmImmediateNmCycleTime作为周期时间。应尽快触发第一个NM PDU的发送。
发送完成后,报文周期计时器(Message Cycle Timer)将被重新加载为CanNmImmediateNmCycleTime。在这种情况下,不能使用CanNmMsgCycleOffset。
2.2、CanNmMsgReducedTime
CanNmMsgReducedTime主要可以用来降低CAN总线的负荷。
关于CanNmMsgReducedTime,主要有如下两个规则:
1) 若节点收到网络管理报文后,则将下帧网络管理报文的计时时间,重新加载为CanNmMsgReducedTime(取值范围为0.5CanNmMsgCycleTime ~ CanNmMsgCycleTime);
2) 若节点发送了网络管理报文后,则将下帧网络管理报文的计时时间,重新加载为CanNmMsgCycleTime;
如果收到网络管理PDU,则用节点特定的定时参数CanNmMsgReducedTime重新加载CanNm消息周期定时器。
节点具体时间CanNmMsgReducedTime应该大于½CanNmMsgCycleTime,小于CanNmMsgCycleTime。
如果发送了网络管理PDU,则用网络管理集群特有的定时参数CanNmMsgCycleTime重新加载报文周期定时器。
这会导致以下行为:
只有CanNmMsgReducedTime时间最小的两个节点在网络中交替传输Network Management PDU。如果其中一个节点停止传输,则下一个CanNmMsgReducedTime时间最小的节点开始传输Network Management PDU。
如果网络中只有一个节点需要总线通信,则每个CanNmMsgCycleTime发送一个network Management PDU。
如果全局使能了bus load reduction机制(CanNmBusLoadReductionEnabled为TRUE),对于激活的特定网络,使能了PDU传输能力,并且为该网络调用了CanNm_RxIndication功能,则CanNm模块将以节点特定时间CanNmMsgReducedTime重新启动CanNm消息周期定时器
取值范围如下:
0,5 * CanNmMsgCycleTime ≤ CanNmMsgReducedTime < CanNmMsgCycleTime
该参数仅在满足如下条件时有效:
CanNmBusLoadReductionEnabled == True and
CanNmBusLoadReductionActive == True and
CanNmPassiveModeEnabled == False
CanNmMsgReducedTime具体是如何降低CAN总线的负荷的,可以详见如下解析,或可以详见《AUTOSAR_SWS_CANNetworkManagement.pdf》中11章节。
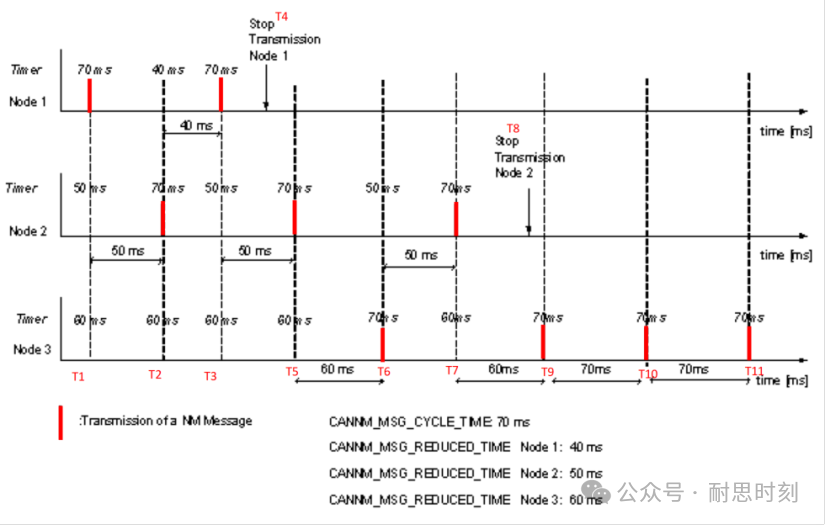
三个节点连接到总线,处于“正常运行”状态。CanNmMsgReducedTime最小的节点(Node 1和Node 2)交替发送各自的Network Management PDU。过了一会儿,节点1进入“就绪睡眠”状态。节点2和节点3正在交替发送网络管理PDU。过了一会儿,节点2也进入“就绪睡眠”状态。由于节点3是总线上的最后一个节点,因此只有节点3使用CanNmMsgCycleTime发送消息。
具体每个时刻解析如下:
在T1时刻:
1) Node1发出网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
2) Node2收到Node1的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(50ms)
3) Node3收到Node1的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(60ms)
在T2时刻:
1) 故Node2会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
2) Node1收到Node2的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(40ms)
3) Node3收到Node2的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(60ms)
在T3时刻:
1) 故Node1会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
2) Node2收到Node1的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(50ms)
3) Node3收到Node1的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(60ms)
在T4时刻:Node1不再需要网络,故停止发送NM报文。
在T5时刻:
1) 故Node2会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
2) Node3收到Node2的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(60ms)
在T6时刻:
1) 故Node3会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
2) Node2收到Node3的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(50ms)
在T7时刻:
1) 故Node2会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
2) Node3收到Node2的网络管理报文,故设置本节点下次NM的发送时间为CanNmMsgReducedTime(60ms)
在T8时刻:Node2不再需要网络,故停止发送NM报文。
在T9时刻:
1) 故Node3会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
在T10时刻:
1) 故Node3会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
在T11时刻:
1) 故Node3会在此时发出网络管理报文,且设置本节点下次NM的发送时间为CanNmMsgCycleTime(70ms)
备注:CanNmMsgCycleOffset和CanNmMsgReducedTime主要来用降低CAN 总线负荷,如果网络上的NM节点不多的情况下,一般不会使用这两个参数。做了几个项目了,目前OEM实际也比较少用这两个参数。
2.3、NMGlobalCoordinatorTime
讲这个参数之前,先大概讲解下Coordinator相关知识。
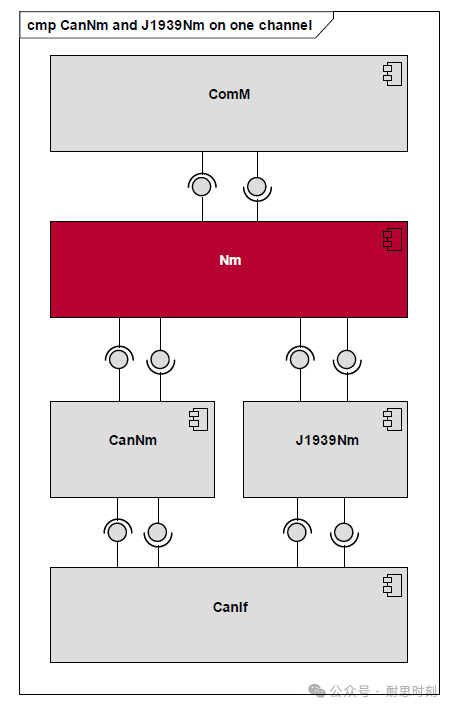
AUTOSAR网络管理主要涉及两个软件模块CanNM,NM模块。
前面介绍的参数都是CanNM相关的内容,而参数NMGlobalCoordinatorTime是Nm模块相关的内容。
NM模块是在CanNM的上层,ComM通过NM模块与特定总线NM模块(如CanNM)进行通信,从而实现完全的抽象和硬件(总线)的独立性。
可以参考下图,应该就能大概理解CanNm和NM模块的用途及区别了。
NM模块主要涉及如下代码文件:
Nm.c (src\components\nm\implementation)
Nm.h (src\components\nm\implementation)
Nm_Cbk.h (src\components\nm\implementation)
NmStack_Types.h (src\components\nm\implementation)
Nm_Cfg.c(src\gendata)
Nm_Cfg.h (src\gendata)
Nm_Lcfg.c (src\gendata)
SchM_Nm_Type.h(src\gendata)
那什么时候会用到协调器coordinator呢?再看下面另一张图:
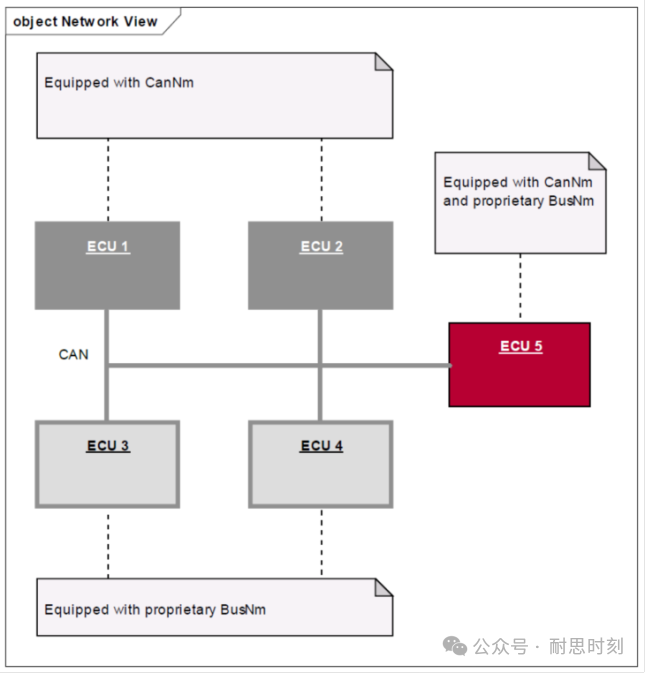
上图中,ECU1~ECU5采用CAN总线连接在一起。
-
其中ECU1和ECU2采用AUTOSAR CanNM网络管理
-
ECU3和ECU4采用其他网络管理(如J1939NM)
-
ECU5同时需支持AUTOSAR CanNM和J1939NM两种网络管理。
综上,ECU1~ECU4无需支持coordinator功能,但ECU5需支持coordinator功能。
OK,返回来,讲一下参数NmGlobalCoordinatorTime,该参数定义了连接和协调的NM-Cluster的最大关闭时间。
说白话就是,因为同时连接了多个网络管理,所以必须每个网络管理都休眠了,才能让系统进入休眠,该参数是为了协调这个的。
NmGlobalCoordinatorTime只有在NmCoordinatorSupportEnabled为TRUE时才有效。
NmGlobalCoordinatorTime至少应设置为关闭所有协调的网络所需的最大时间,示例如下图:
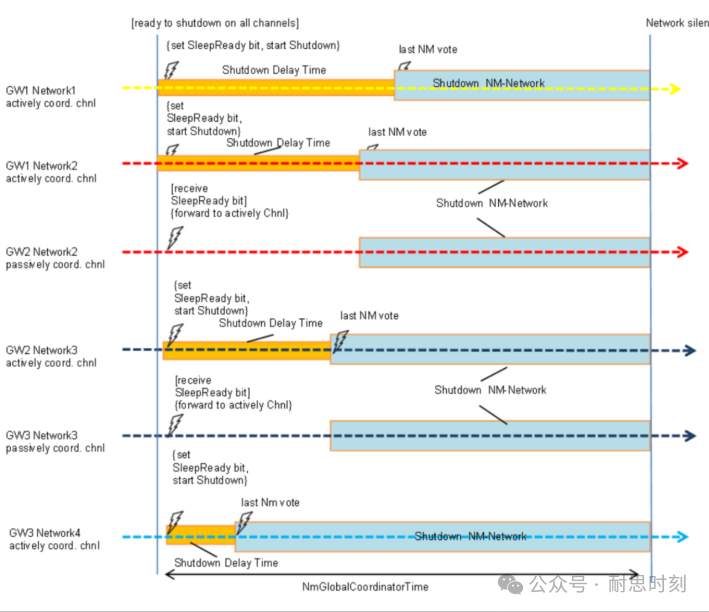
注意:上图涉及了3个GW,4个network。
第三部分:其他参数
第三部分:AUTOSAR标准文档里未找到相关参数,但实际应用中会用的一些参数。
主要有如下参数:
1、T_WAKEUP
2、T_START_NM_TX
3、T_START_AppFrame
3.1、T_WAKEUP
节点从唤醒事件发生(远程唤醒、本地唤醒事件),到发出第一帧网络管理报文的最大允许时间间隔。
一般可设置为100ms~200ms,具体以OEM要求为准。
3.2、T_START_NM_TX
该参数定义了节点从准备总线睡眠模式(Prepare Bus Sleep Mode)、 常规运行状态(Normal Operation State)或准备睡眠状态(Ready Sleep State)进入重复报文状态(Repeat Message State), 到发出第一帧网络管理报文的最大允许时间间隔。
一般可设置为10ms-50ms,具体以OEM要求为准。
3.3 T_START_AppFrame
成功发送第一帧网络管理报文后,到开始发送APP报文的最大间隔。
一般可设置为20ms-50ms,具体以OEM要求为准。
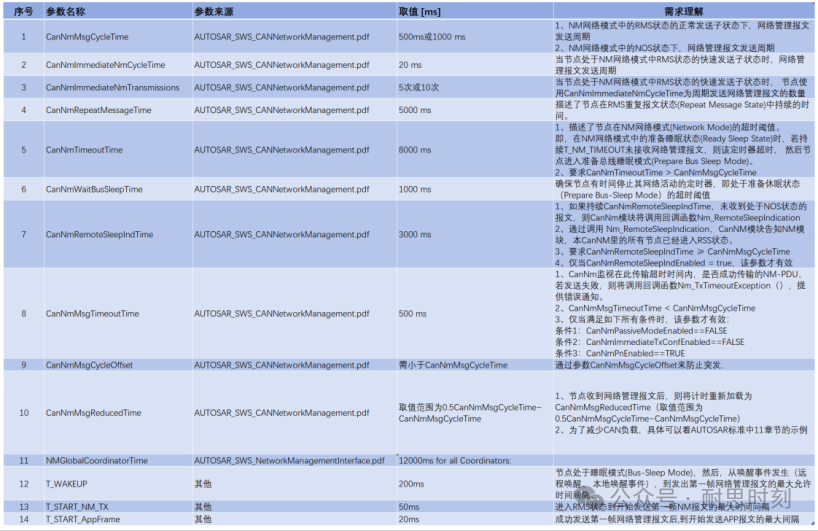
4、总结
将如上所有参数,汇总整理成下表:

![Sqli-labs靶场第9关详解[Sqli-labs-less-9]](https://img-blog.csdnimg.cn/direct/964bfff361e44d4e948ecdf42242e2aa.png)