linux drm mipi dsi lcd 点屏之设备树配置
设备树文档:
https://elixir.bootlin.com/linux/v6.8-rc5/source/Documentation/devicetree/bindings/display/dsi-controller.yaml
https://elixir.bootlin.com/linux/v6.8-rc5/source/Documentation/devicetree/bindings/display/panel/display-timings.yaml
https://elixir.bootlin.com/linux/v6.8-rc5/source/Documentation/devicetree/bindings/display/panel/panel-timing.yaml
https://blog.csdn.net/lonely_fireworks/article/details/129362860
Android画面显示流程分析(1)–LCD时序
https://cloud.tencent.com/developer/article/1867373
Linux MIPI DSI LCD设备驱动开发调试细节学习笔记(一)
https://blog.csdn.net/qq_37858386/article/details/123705548
2022-03-24 RK3566 MIPI屏 调试记录,panel-init-sequence 命令格式介绍
驱动点屏:
1)屏幕pin引脚定义
2)panel-init-sequence初始化code
3)屏幕上电时序
4)display timing
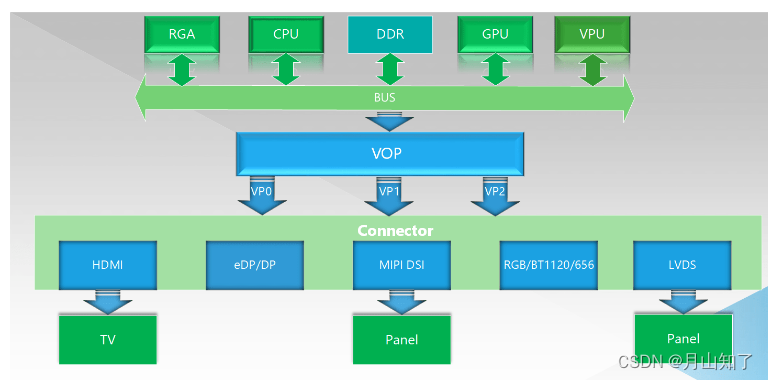
显示接口有:HDMI,eDP/DP,MIPI DSI,RGB、BT1120/656,LVDS等等
在android 设备上用的比较多的是MIPI DSI。
不同的显示接口点屏,需要参考相应设备树文档进行配置。
下面以mipi dsi接口连接lcd点屏进行举例。
panel-timing.yaml内容:
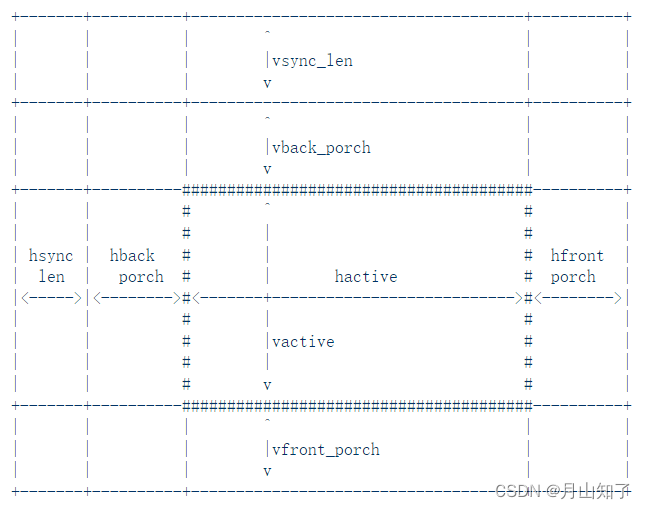
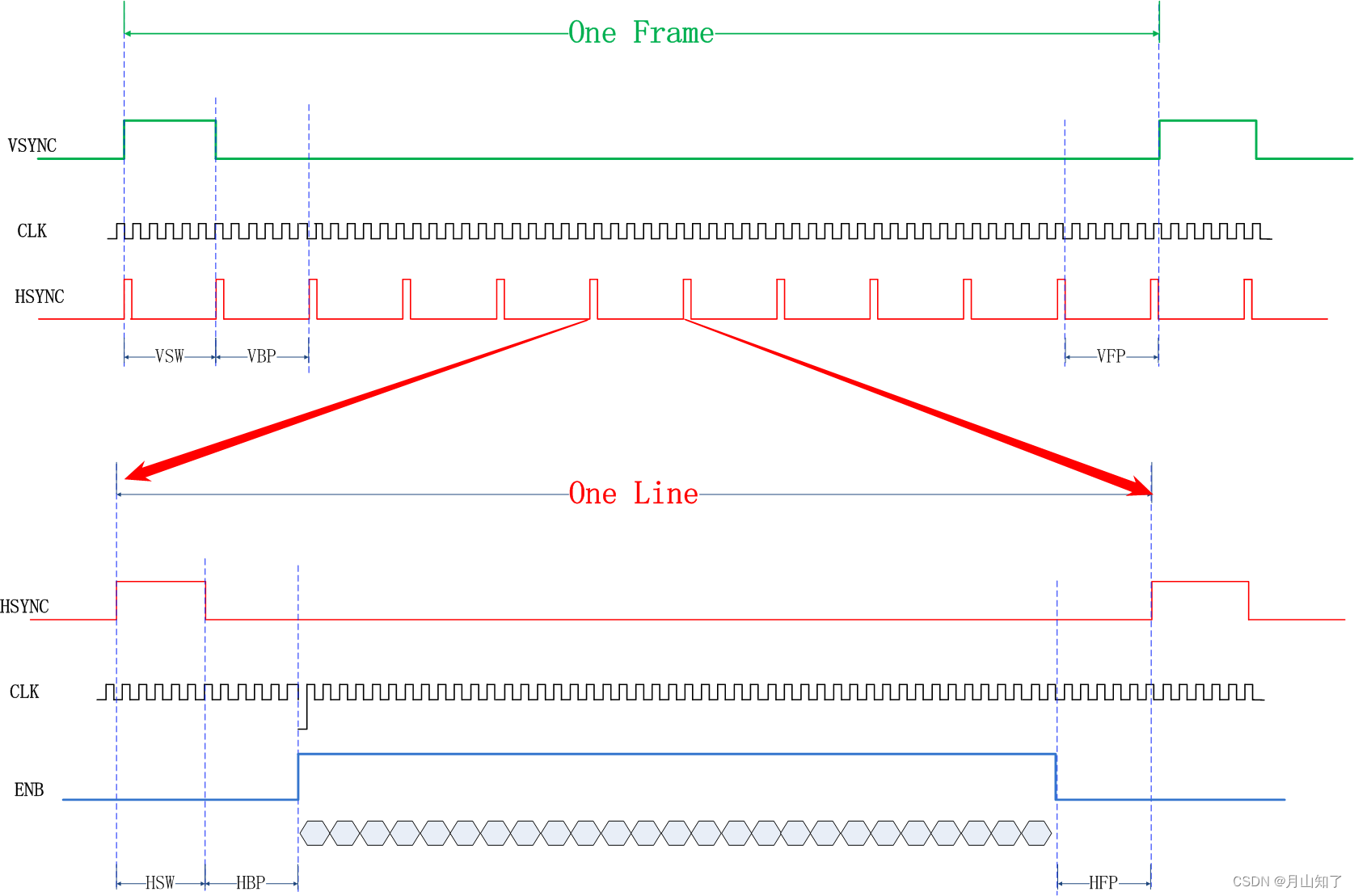
hback-porch (HBP):行信号左边沿无效信号时间范围
hfront-porch (HFP): 行信号右边沿无效信号时间范围
hsync-len (HPW): 行信号电子枪回扫时间 即 水平同步时间 Hsyc
vback-porch(VBP) :帧信号上边沿无效信号时间范围
vfront-porch(VFP):帧信号下边沿无效信号时间范围
vsync-len(VPW):帧信号电子枪回扫时间 即垂直同步时间 Vsync
hactive(HVD):有效像素信号纵向分辨率
vactive(VVD):有效像素信号横向分辨率
如下LCD时序图参考文档:https://blog.csdn.net/lonely_fireworks/article/details/129362860 LCD时序
1,计算clock-frequency方法:
htotal: (一行数据)hsync水平同步信号需要的总的像素时钟周期个数
vtotal: (一列数据)vsync垂直同步s信号需要的总的像素时钟周期个数
hsync-len: hsync水平同步信号的低电平(非有效电平)持续的时间,即需要的像素时钟周期个数
clock-frequency: panel clock in Hz
htotal = (hback-porch + hactive + hfront-porch + hsync-len)
vtotal = (vback-porch + vactive + vfront-porch + vsync-len)
clock-frequency = htotal * vtotal * 刷新率
2,计算rockchip,lane-rate方法:
rockchip,lane-rate = htotal * vtotal * 刷新率 * 3(RGB) * 8(bit位) / dsi,lanes(lane数)/ 0.9
或者:
rockchip,lane-rate = htotal * vtotal * 刷新率 * 3(RGB) * 8(bit位) * 10 / dsi,lanes(lane数)/ 9
3(RGB):是每一个 pixel 有 RGB 3 个分量;
0.9:是考虑 mipi 时序的传输效率;
例子:
clock-frequency = <57153600>; // 计算:默认andoid手机屏幕fps = 60, (5 + 5 + 720 + 5) * (2 + 1 + 1280 + 13) * 60 = (735 * 1296) * 60 = 57153600
例子:
clock-frequency = <57153600>; // 计算:默认andoid手机屏幕fps = 60, (5 + 5 + 720 + 5) * (2 + 1 + 1280 + 13) * 60 = (735 * 1296) * 60 = 57153600
examples:
- |
dsi {
#address-cells = <1>;
#size-cells = <0>;
panel@0 {
compatible = "samsung,s6e8aa0";
reg = <0>;
vdd3-supply = <&vcclcd_reg>;
vci-supply = <&vlcd_reg>;
reset-gpios = <&gpy4 5 0>;
power-on-delay= <50>;
reset-delay = <100>;
init-delay = <100>;
panel-width-mm = <58>;
panel-height-mm = <103>;
flip-horizontal;
flip-vertical;
display-timings {
timing0: timing-0 {
clock-frequency = <57153600>; // 默认andoid手机屏幕fps = 60, (5 + 5 + 720 + 5) * (2 + 1 + 1280 + 13) * 60 = (735 * 1296) * 60 = 57153600
hactive = <720>;
vactive = <1280>;
hfront-porch = <5>;
hback-porch = <5>;
hsync-len = <5>;
vfront-porch = <13>;
vback-porch = <1>;
vsync-len = <2>;
};
};
};
};
如下内容参考文档:https://blog.csdn.net/LinuxArmbiggod/article/details/83277035 LCD点屏杂记
关于像素时钟和lane传输速率的计算
像素时钟:clock-frequency 即DCLK(dot clock), PCLK(pixel clock).
clock-frequency = (h_active + hfp + hbp + h_sync) * (v_active + vfp + vbp + v_sync) * fps
clock-frequency = 水平信号总周期垂直信号总周期帧率
fps为帧率,一般为60,表示每秒刷新60帧图像
lane传输速率:表示一条数据 lane 的传输速率,单位为 Mbits/s
lane_clk = 100 + H_total×V_total × fps × 3 × 8 / lanes_nums
total 这里指的是 水平 垂直信号总周期
fps 为帧率 取60
3 × 8 代表一个 RGB 为 3 个字节,每个字节 8 bit
lanes 代表 data 通道数
如:
rockchip,lane-rate = 100 + H_total×V_total × fps × 3 × 8 / lanes_nums / 0.9
0.9:是考虑mipi时序的传输效率
如下内容参考文档:http://www.nnewn.com/page226?article_id=281 Rockchip_Developer_Guide_DRM_Display_Driver_CN.pdf
带宽的计算方法
1)图像的带宽
以1080P ARGB格式的图像数据为例:
ARGB格式一个像素占用的内存大小:4 Byte
1080P ARGB格式的数据占用内存:1920 x 1080 x 4Byte/pixel = 8,100 Kbyte
如果按 60fps 刷新,占用的带宽是: 8,100 x 60fps = 474.6 Mbyte/s
2)显示接口的带宽
Bandwidth
MIPI DSI 驱动中会自动按如下公式根据不同的工作模式进行带宽的计算,当然在调试过程中也许对计算
的结果想做些微调可以通过 DTS dsi 节点下 rockchip,lane-rate 属性进行指定,单位可以是
Kbps/Mbps(D-PHY) 或 Ksps/Msps (C-PHY)
display-timings {
native-mode = <&dsi0_timing0>;
dsi0_timing0: timing0 {
clock-frequency = <132000000>;
hactive = <1920>;
vactive = <1080>;
hback-porch = <30>;
hfront-porch = <15>;
hsync-len = <2>;
vback-porch = <15>;
vfront-porch = <15>;
vsync-len = <2>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
hsync-active 行同步信号有效电平,0表示低电平有效,1表示高电平有效
vsync-active 帧同步信号有效电平,0表示低电平有效,1表示高电平有效
pixelclk-active:数据采样的方式
配置为1:上升沿驱动像素数据/下降沿采样数据
配置为0:下降沿驱动像素数据/上升沿采样数据
如panel-timing.yaml说明:
hsync-active:
description: |
Horizontal sync pulse.
0 selects active low, 1 selects active high.
If omitted then it is not used by the hardware
de-active:
description: |
Data enable.
0 selects active low, 1 selects active high.
If omitted then it is not used by the hardware
以上面设备树配置的时序为例,当前这个时序下,按 60 帧刷新需要的 dclk 是:131994240 hz,dts 实际按取整 132000000 hz 配
置:
htotal = hfp + hsync + hbp + hactive = 15 + 2 + 30 + 1080 = 1,127
vtotal = vfp + vsync + vbp + vactive = 15 + 2 + 15 + 1920 = 1,952
dclk = htotal x vtotal x fps = 1127 x 1952 x 60fps = 131,994,240
MIPI 接口上传输的频率是:
rockchip,lane-rate = 132M x 3(RGB) x 8(bpc) / 4(lane) / 0.9 = 880 Mbps
其中:
x3(RGB):是每一个 pixel 有 RGB 3 个分量;
x8(bpc):是每一个分量的位深是 8bit;
/4(lane):是这么多数据量在 4 lane 上传输,/4 是计算每 lane 的数据量;
/0.9:是考虑 mipi 时序的传输效率;
如下内容参考文档:https://blog.csdn.net/qq_37858386/article/details/123705548
2022-03-24 RK3566 MIPI屏 调试记录,panel-init-sequence 命令格式介绍
dts配置:
&dsi1 {
status = "okay";
rockchip,lane-rate = <xxxx>;
panel@0 {
compatible = "simple-panel-dsi";
reg = <0>;
backlight = <&backlight>;
//power-supply=<&vcc_3v3>;
enable-gpios = <&gpio0 RK_PC7 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 RK_PC5 GPIO_ACTIVE_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&lcd_enable_gpio>, <&lcd_rst_gpio>;
prepare-delay-ms = <120>;
reset-delay-ms = <120>;
init-delay-ms = <120>;
stbyb-delay-ms = <120>;
enable-delay-ms = <120>;
disable-delay-ms = <120>;
unprepare-delay-ms = <120>;
width-mm = <229>;
height-mm = <143>;
dsi,flags = <(MIPI_DSI_MODE_VIDEO | MIPI_DSI_MODE_VIDEO_BURST |
MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET)>;
dsi,format = <MIPI_DSI_FMT_RGB888>;
dsi,lanes = <8>;
panel-init-sequence = [
39 00 06 FF 77 01 00 00 10
39 00 03 C0 E9 03
39 00 03 C1 08 02
39 00 03 C2 31 08
15 00 02 CC 10
39 00 11 B0 00 0B 10 0D 11 06 01 08 08 1D 04 10 10 27 30 19
39 00 11 B1 00 0B 14 0C 11 05 03 08 08 20 04 13 10 28 30 19
39 00 06 FF 77 01 00 00 11
15 00 02 B0 35
15 00 02 B1 38
15 00 02 B2 02
15 00 02 B3 80
15 00 02 B5 4E
15 00 02 B7 85
15 00 02 B8 20
15 00 02 B9 10
15 00 02 C1 78
15 00 02 C2 78
15 64 02 D0 88
39 00 04 E0 00 00 02
39 00 0C E1 05 00 00 00 04 00 00 00 00 20 20
39 00 0E E2 00 00 00 00 00 00 00 00 00 00 00 00 00
39 00 05 E3 00 00 33 00
39 00 03 E4 22 00
39 00 11 E5 07 34 A0 A0 05 34 A0 A0 00 00 00 00 00 00 00 00
39 00 05 E6 00 00 33 00
39 00 03 E7 22 00
39 00 11 E8 06 34 A0 A0 04 34 A0 A0 00 00 00 00 00 00 00 00
39 00 08 EB 02 00 10 10 00 00 00
39 00 03 EC 02 00
39 00 11 ED AA 54 0B BF FF FF FF FF FF FF FF FF FB B0 45 AA
39 00 06 FF 77 01 00 00 00
15 00 02 36 00
05 78 01 11
05 14 01 29
];
panel-exit-sequence = [
05 00 01 28
05 00 01 10
];
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <27000000>;
hactive = <480>;
vactive = <854>;
hfront-porch = <150>;
hsync-len = <10>;
hback-porch = <10>;
vfront-porch = <14>;
vsync-len = <4>;
vback-porch = <6>;
hsync-active = <1>;
vsync-active = <1>;
de-active = <0>;
pixelclk-active = <1>;
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi: endpoint {
remote-endpoint = <&dsi_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi>;
};
};
};
};
&dsi1_in_vp0 {
status = "disabled";
};
&dsi1_in_vp1 {
status = "okay";
};
port配置参考文档:linux设备树:phandle和port