文章目录
- 环境要求
- 下载Carla
- 解压Carla
- 运行Carla
- 测试官方用例
- 创建python环境
- 安装依赖包
- 案例:生成车辆
- 案例:测试自动驾驶
- 参考链接
环境要求
系统配置要求:
- 至少3G显存的GPU,推荐3060及以上的显卡进行Carla拟真。
- 预留足够的硬盘空间,推荐50G以上。
- Ubuntu 14.04/16.04/18.04/20.04版本。
下载Carla
本教程使用的是压缩包下载方式(个人感觉这种方式比较方便),下载链接如右所示: https://github.com/carla-simulator/carla/releases
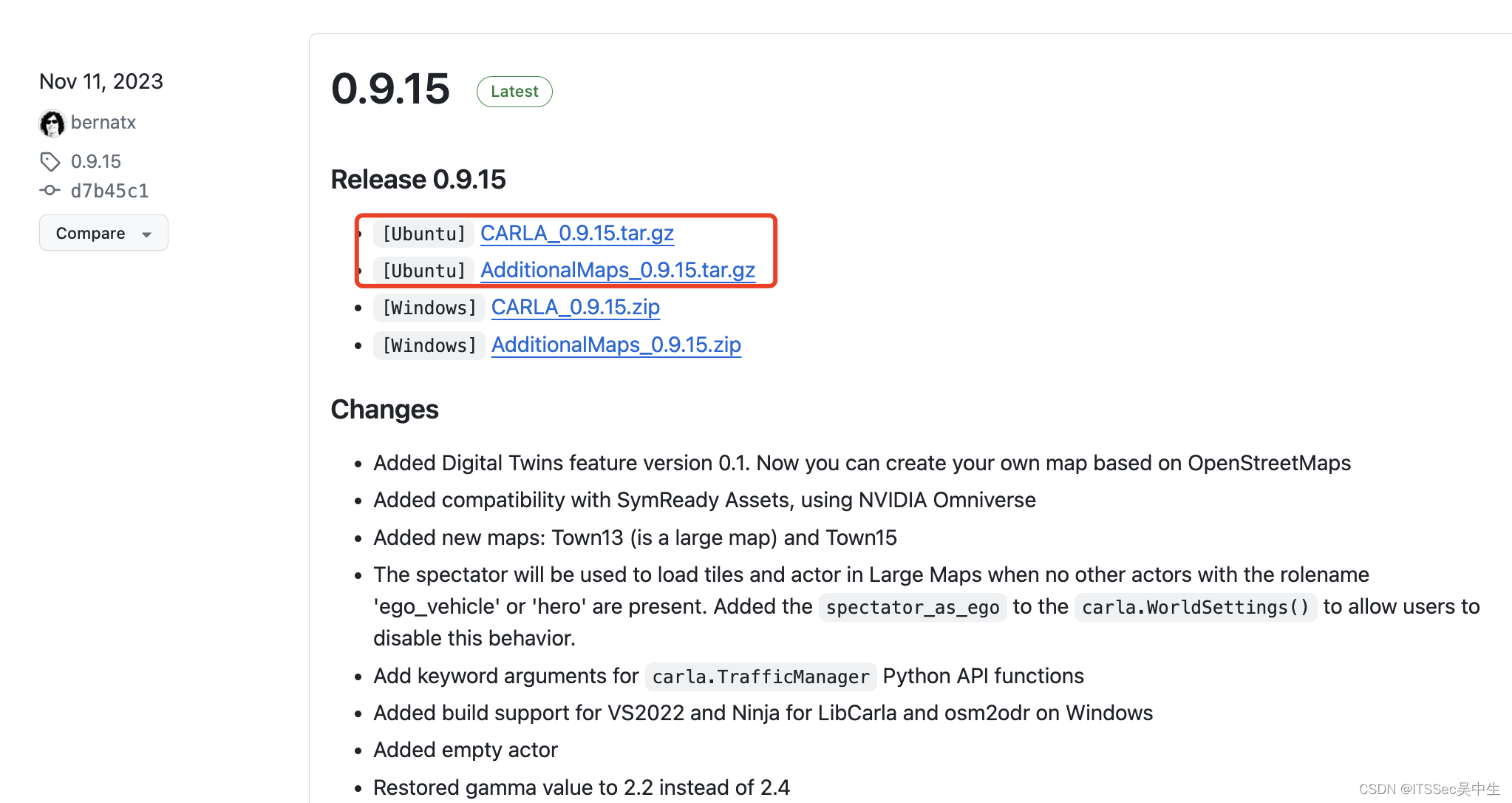
选择 [Ubuntu] CARLA_0.9.15.tar.gz 版本下载即可,至于额外的地图,可下可不下,对现阶段安装来说不影响。
解压Carla
在家目录下创建一个文件夹,用于存放Carla安装文件包,如下所示:
cd ~
mkdir Carla_0.9.15
将下载的CARLA_0.9.15.tar.gz文件移动到 ~/Carla_0.9.15/ 目录下,然后进行解压,如下所示:
tar -zxvf CARLA_0.9.15.tar.gz
运行Carla
在 ~/Carla_0.9.15 目录下,有一个 CarlaUE4.sh 文件,这就是Ubuntu系统的Carla启动文件,直接执行文件即可启动Carla,如下所示:
./CarlaUE4.sh # 或使用 sh ./CarlaUE4.sh 命令
执行上述命令后,会弹出一个窗口,开始几分钟可能会窗口黑屏,只需等待几分钟即可。等待几分钟之后,窗口弹出下列界面,即为Carla环境:
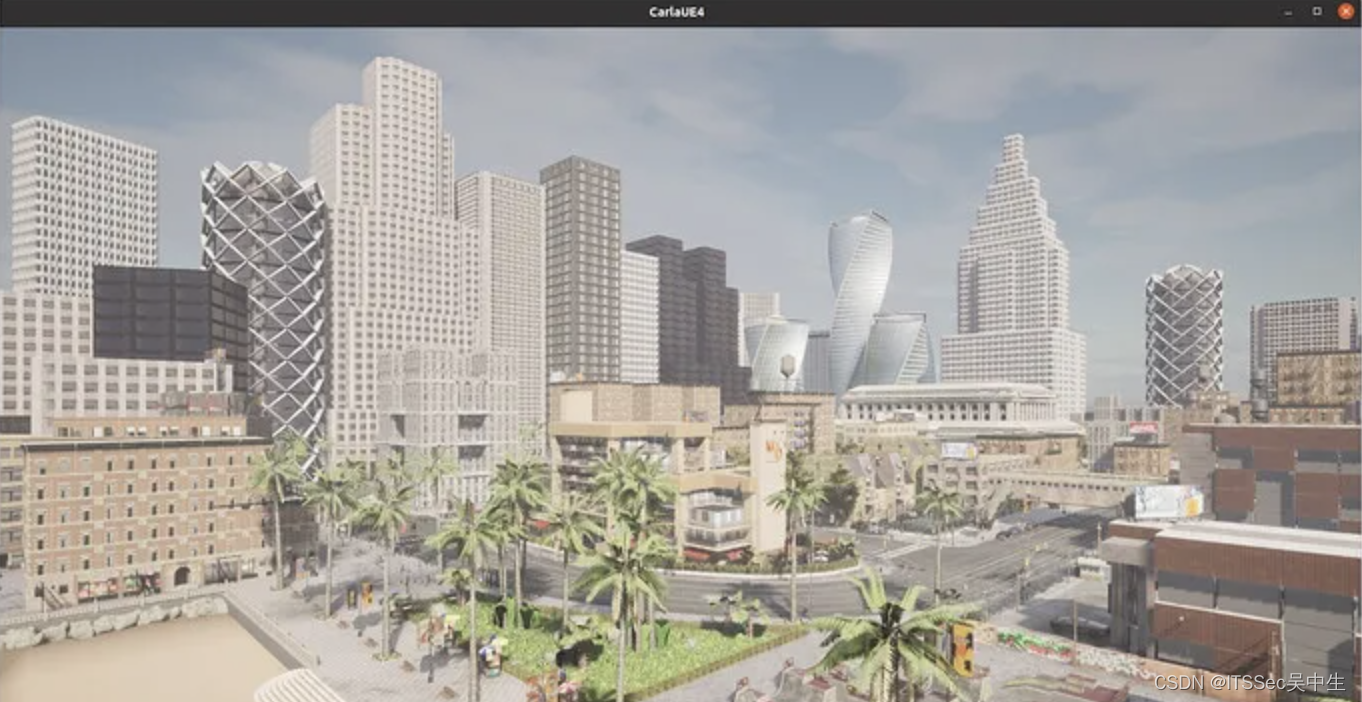
现在Carla已经可以运行起来了,不过我们现在只能操作观察者移动,四处查看一下这个新创建的环境:
Q - 向下飞
E - 向上飞
W - 向视角前方飞
S - 向视角后方飞
A - 向视角左方飞
D - 向视角右方飞
测试官方用例
创建python环境
Carla官方给了一些PythonAPI的用例,代码放在了 PythonAPI/example 目录下,在测试之前需要先创建Carla的环境(在这我是用Conda创建的python3.7的环境):
conda create -n carla0.9.15 python=3.7
安装依赖包
pip install pygame numpy
cd PythonAPI/examples/
pip install -r requirements.txt
案例:生成车辆
PythonAPI/example目录下可以看到里面有很多官方给我们的案例,注意在运行PythonAPI里的案例程序时,我们要保证Carla处于运行状态,也就是要先用./CarlaUE4.sh 启动Carla之后才能运行Python程序。
./CarlaUE4.sh # 启动Carla
cd PythonAPI/examples/
python generate_traffic.py # 执行python脚本
运行成功之后我们就会发现我们的街道上开始有车辆可以移动了,如下图所示:

案例:测试自动驾驶
学习自动驾驶必须有一辆主车进行测试,运行下面的程序,就会有一辆由Carla控制的自动驾驶小车出现作为测试主车了:
./CarlaUE4.sh # 启动Carla
cd PythonAPI/examples/
python automatic_control.py # 执行python脚本

参考链接
- https://zhuanlan.zhihu.com/p/646036344
- https://carla.readthedocs.io/en/stable/getting_started/