las数据转pcd数据
- 一、算法原理
- 1.介绍`las`
- 2.主要函数
- 二、代码
- 三、结果展示
- 3.1 `las`数据
- 3.2 `las`转换为`pcd`
- 四、相关数据链接
一、算法原理
1.介绍las
LAS文件按每条扫描线排列方式存放数据,包括激光点的三维坐标、多次回波信息、强度信息、扫描角度、分类信息、飞行航带信息、飞行姿态信息、项目信息、GPS信息、数据点颜色信息等。LAS格式定义中用到的数据类型遵循1999年ANSI(AmericanNationalStandardsInstitute,美国国家标准化协会)C语言标准。
2.主要函数
inFile = np.vstack((las.x, las.y, las.z)).transpose() # 转换为ndarray
二、代码
import laspy
import numpy as np
import open3d as o3d
def las2pcd_rel(lasfile):
las = laspy.read(lasfile) # 读取点云
inFile = np.vstack((las.x, las.y, las.z)).transpose() # 转换为ndarray
# 将numpy转换为点云文件
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(inFile)
o3d.visualization.draw_geometries([pcd])
return pcd
if __name__ == '__main__':
path = 'res/城市路面.las'
las2pcd_rel(path)
三、结果展示
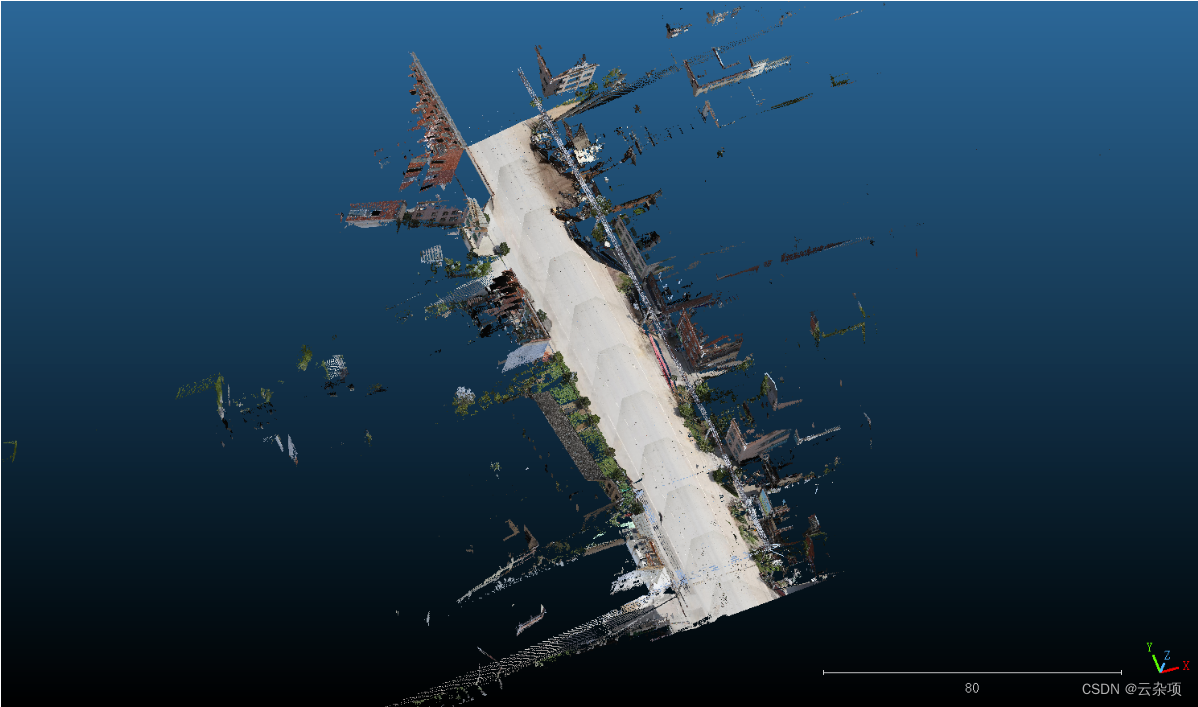
3.1 las数据
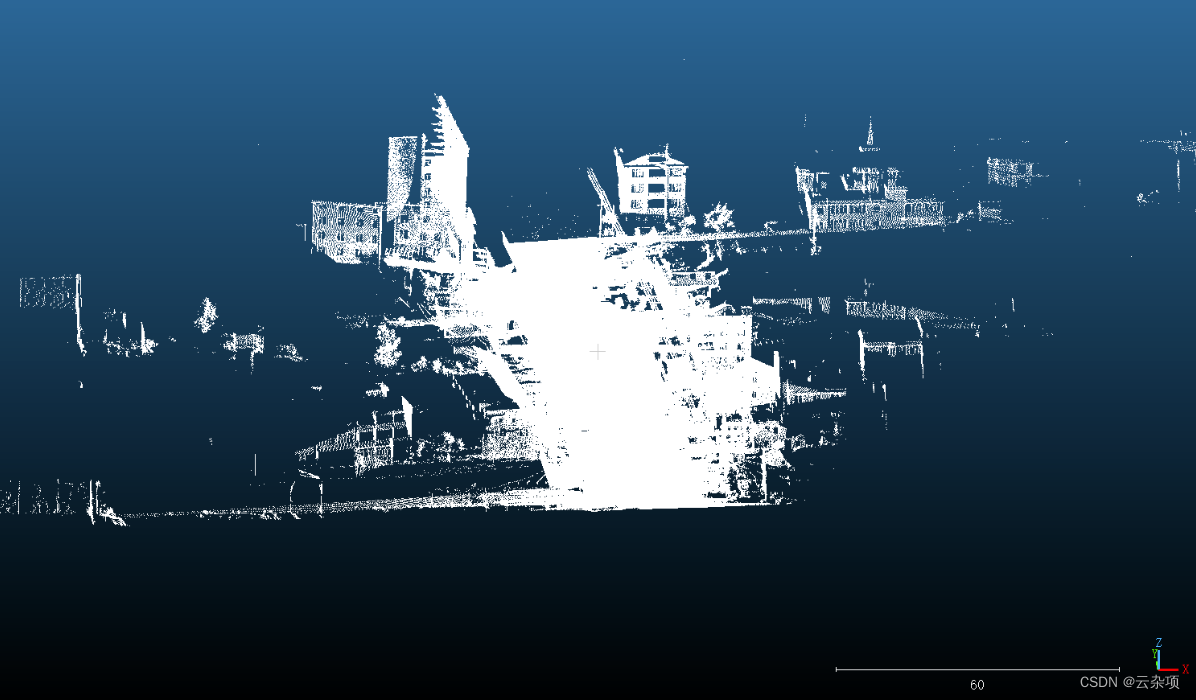
3.2 las转换为pcd
四、相关数据链接
百度网盘数据集:
包括 obj,pcd,las,png,ply等
百度网盘链接:https://pan.baidu.com/s/1JFxKUk_xMcEmpfBHtuC-Pg
提取码:cpev