ArduPilot开源飞控之硬件SBC分析
- 1. 源由
- 2. Companion Computer
- 2.1 APSync【不推荐,无更新】
- 2.2 DroneKit【不推荐,无更新/SDK】
- 2.3 FlytOS【不推荐,闭源】
- 2.4 Maverick【不推荐,闭源】
- 2.5 ROS【专门讨论,开源/复杂】
- 2.6 Rpanion-server【推荐,简单】
- 2.7 BlueOS【推荐,完备】
- 3. Turnkey Solutions
- 3.1 Horizon31 - PixC4-Jetson
- 3.2 Horizon31 - PixC4-Pi
- 3.3 UAVcast-Pro - Raspberry Pi software for LTE / WiFi Drones
- 3.4 XBStation - Platform For Internet Drone Base On Real Time 4G/5G Connectivity
- 4. 总结
- 5. 参考资料
1. 源由
随着当下的技术发展,开源无人机的技术日趋成熟!
因此,如何来完成一架DIY的开源无人机,相信一定是大家感兴趣的。
根据以下文档,资料的研究:
- ArduPilot开源飞控之Companion Computers简单分析
- ArduPilot - Companion Computers
- ArduPilot - Turnkey Companion Computer Solutions
整理、汇总、分析SBC的硬件形态,以便提供普适性更好的基础硬件环境,用于后续的研究、开发、适飞。
2. Companion Computer
2.1 APSync【不推荐,无更新】
最近一次更新(Jun 30, 2022):ROS Navigation: Updated navigation params
主要功能:APSync 开源代码库
- WiFi Telemetry
- DataFlash logging
- Real-time video streaming
支持硬件:
- Raspberry Pi 3
- NVidia TX1
- NVidia TX2
- Intel Edison
2.2 DroneKit【不推荐,无更新/SDK】
最近一次更新(Jun 15, 2023):Make HEARTBEAT handler ignore non-vehicle HEARTBEATs
主要功能:DroneKit SDK开源代码库
- Python SDK for MAVLink development
支持硬件:
- Linux based board
2.3 FlytOS【不推荐,闭源】
主要功能:
- FlytOS, Drone APIs and SDKs for building high-level drone applications
支持硬件:
- Raspberry Pi 3
- Odroid XU4
- NVidia TX1
- Intel Edison
- Intel Aero
- FlytPOD
2.4 Maverick【不推荐,闭源】
主要功能:
- Maverick商业系统闭源
支持硬件:
- Raspberry Pi 1/2/3/Zero/Zero W/Model A/B 3+/4
- Jetson Nano
- Aaeon Up
- NVidia TX1
- NVidia TX2
2.5 ROS【专门讨论,开源/复杂】
主要功能:ROS - Robot Operating System
支持硬件:无明确指定硬件,系统是基于Linux的。
2.6 Rpanion-server【推荐,简单】
最近一次更新(Feb 11, 2024):Video: Fix stream saving for CSI cameras
主要功能:Rpanion-server系统
- Flight Controller telemetry forwarding
- Network control - configurable Wifi and Ethernet
- Video streaming
- Telemetry log management
- NTRIP streaming to flight controller
支持硬件:
- Raspberry Pi 2/3/3+/4
- Intel Edison
2.7 BlueOS【推荐,完备】
最近一次更新(Feb 15, 2024):core: services: ardupilot_manager: AbstractRouter: Add better message…
主要功能:BlueOS开源代码
- Ardupilot固件更新/参数调整
- 支持Linux命令行/配置
- 日志记录
- 支持MAVLink
- 支持TCP/UDP串口
- 支持UDP NMEA Injector
- 支持摄像头高清服务
支持硬件:
- Raspberry Pi 3/3+/4
3. Turnkey Solutions
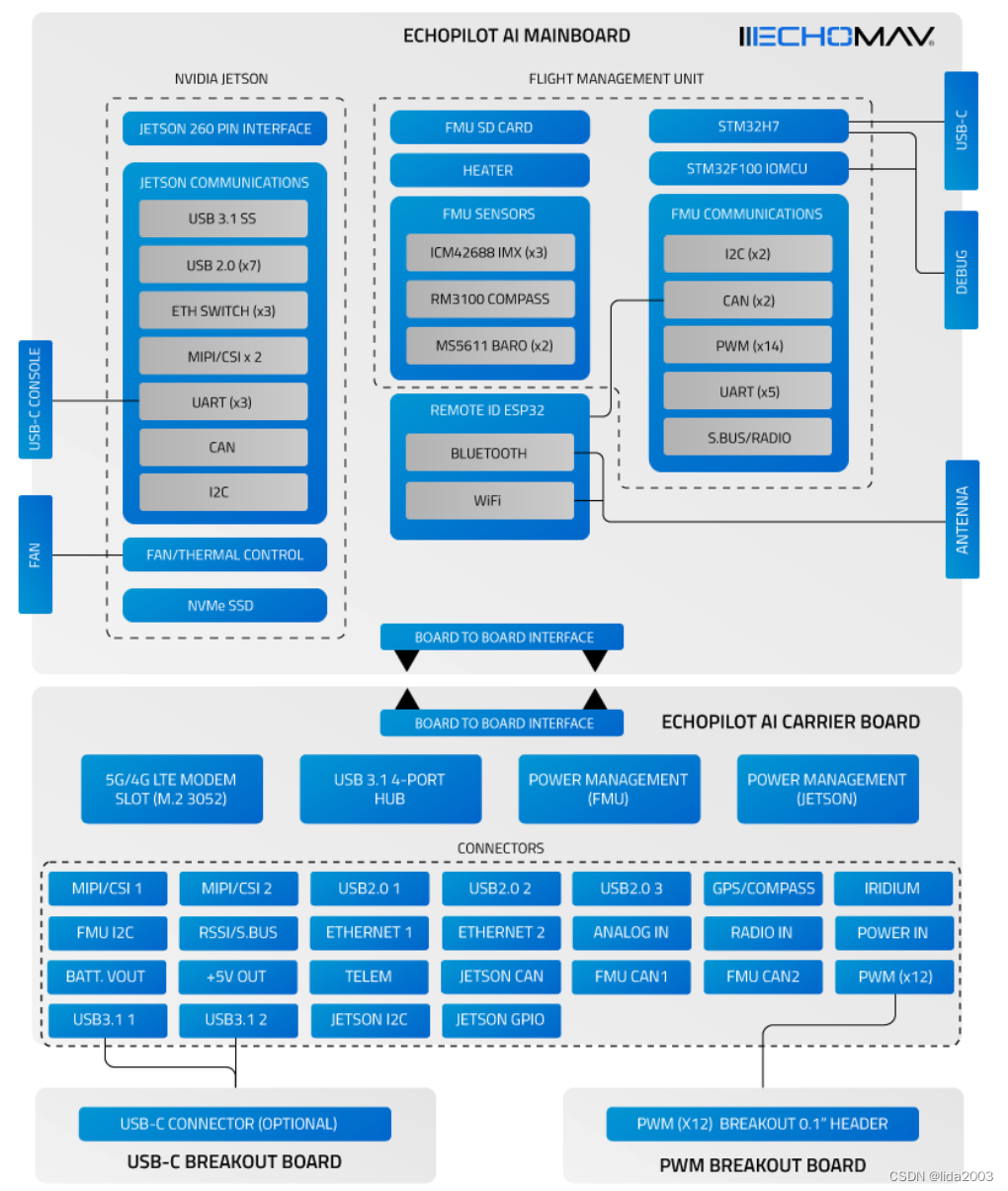
3.1 Horizon31 - PixC4-Jetson
The PixC4-Jetson is a professional-quality NDAA Compliant Flight Management Unit (FMUv5) which supports ArduPilot and is tightly integrated with an Nvidia Jetson (Nano, Xavier NX or TX2 NX) SBC and peripheral support system (USB, MIPI, Ethernet, M.2 slot, etc.).


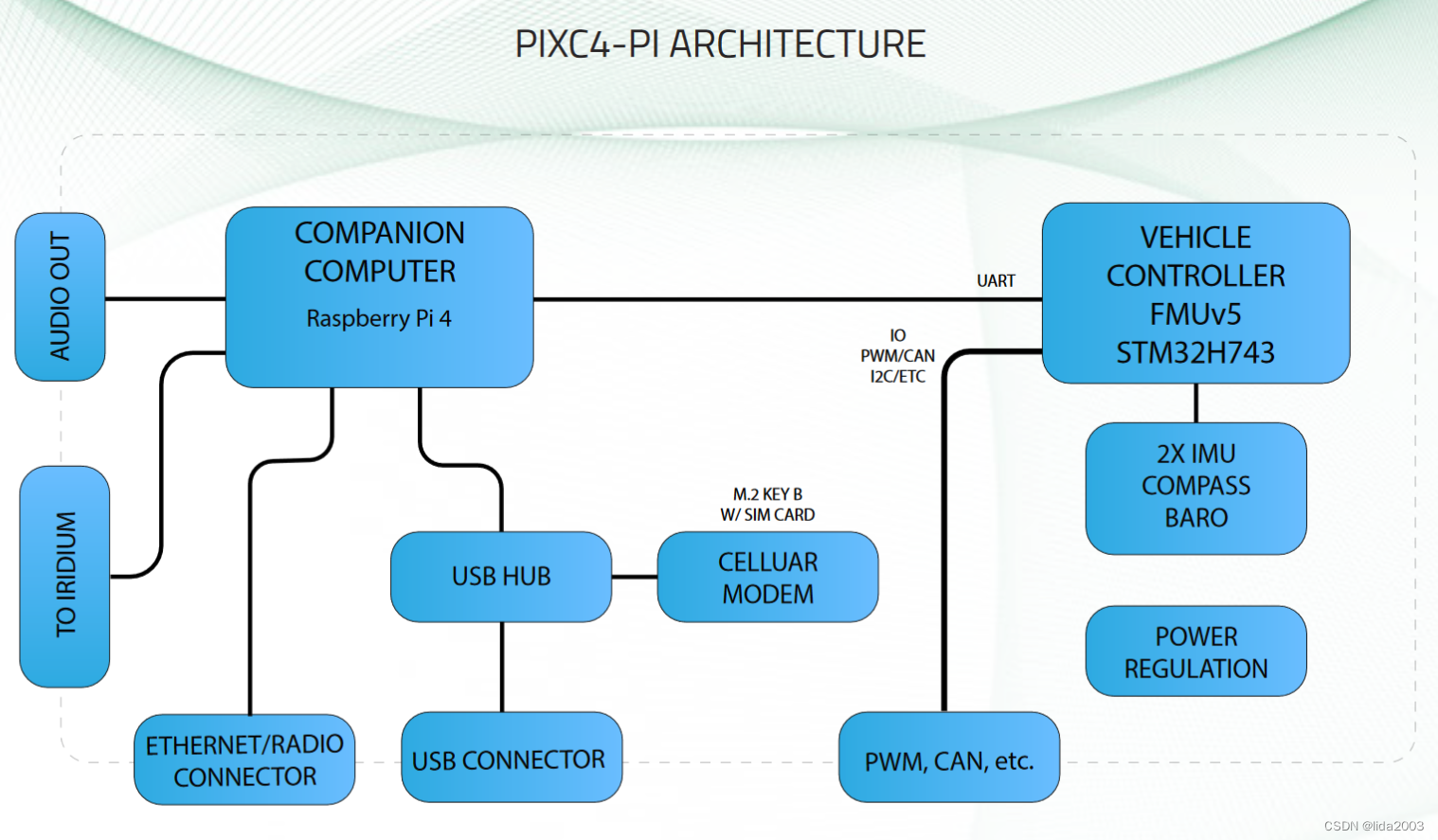
3.2 Horizon31 - PixC4-Pi
The PixC4-Pi is a professional-quality NDAA Compliant Flight Management Unit (FMUv5) which supports ArduPilot and is tightly integrated with a Raspberry Pi 4 compute module and peripheral support system (USB, MIPI, Ethernet, M.2 slot, etc.).


3.3 UAVcast-Pro - Raspberry Pi software for LTE / WiFi Drones
最近一次更新(Jul 26, 2022):spellling
主要功能:UAVcast-Pro, uavcast开源代码
- UDP & TCP Telemetry
- Connect Flight Controller to RPI by USB => USB or Telem => GPIO
- UDP & TCP Video Stream
- HD Video
- Custom Video Pipelines
- VPN with NAT Traversal (Zerotier)
- Multiple Telemetry Destinations
支持硬件:
- Model Pi0w - (with Raspian stretch lite or desktop)
- Model Pi2 - (with Raspian stretch lite or desktop)
- Model Pi3 - (with Raspian stretch lite or desktop)
3.4 XBStation - Platform For Internet Drone Base On Real Time 4G/5G Connectivity
主要功能:XBStation, 闭源
- UDP & TCP Telemetry
- HD Video
- Multiple Vehicles Control with MissionPlanner
- Sharing Telemetry Data and Video Streaming to Your Partners/Customers
- Realtime Vehicle Informations (GPS, Battery, Roll, Pitch, Yaw, …) API
- HD Streaming Live ArduPilot Drone Footage to Your Application/Youtube/Facebook
- OpenVPN
- XB Server for reliable connections
支持硬件:
- Raspberry Pi 2/3B/3B+/4
- Odroid XU4
4. 总结
从上述硬件SBC设计规格、开源支持情况、功能特性等看:
- TrunKey Solutions 整体会更加偏向产品化,功能完善
- Companion Computer 存在较多长时间不再更新Git库,但也存在研究性精简CC系统
- NDAA Compliant 产品架构设计完善,规格完备,规划周祥
- 发展趋势的角度:高清摄像头/AI智能分析/高规格飞控/中远距离控制 系统级集成应用
暂时没有其他想法,不过拓展了一下眼界,思维层面上有了更多的参考和依据。
5. 参考资料
【1】ArduPilot开源飞控之Companion Computers简单分析
【2】ArduPilot开源代码之CompanionComputer上天计划
【3】ArduPilot开源飞控系统之简单介绍