论文地址:Museth_TOG13.pdf

概述
论文提出了一个称为VDB的新颖数据结构和算法,它可以高效地表示三维网格上的稀疏、随时间变化的数据。
VDB的数据结构基于B+树,包含一个动态的根节点,以及多个内部节点和叶节点层次,这些节点具有不同的分支因子和较小的尺寸。它通过倒序遍历已经访问过的节点来实现随机访问的显著加速,同时保持了固定的树深度和分支因子。
主要优势包括:灵活且快速的随机访问、无限制的索引域、支持任意网格拓扑、小的内存和磁盘占用、快速的写入速度、自适应采样、层次化的CSG和填充、高效的拓扑膨胀和腐蚀、内置的加速结构以及用于数值模拟的快速顺序模板访问。
作者通过与现有的稀疏数据结构(如DT-Grid和H-RLE)的性能比较验证了这些优势。总体而言,VDB是一种用于动态体积的更高效、更灵活的替代方案。
现有的稀疏数据结构DT-Grid和H-RLE具有以下特点:
1. 专为窄带Level Set设计,限制了它们只能表示窄带Level Set,而不适用于一般的稀疏体数据。
2. 随机访问依赖局部拓扑,导致随机访问时间复杂度与局部拓扑的log函数相关,限制了它们在空间连贯访问模式下的效率。
3. 不支持随机插入和删除,这限制了它们在动态场景下的应用。
4. 内存占用率较低,由于专为窄带Level Set优化,它们在表示窄带Level Set时内存占用率较低。
5. 访问速度较慢,相对于VDB,由于树结构较深,随机访问速度较慢。
6. 不支持无限坐标域,由于树结构深度固定,它们支持的坐标域是有限的。
7. 层级结构不灵活,由于分支因子固定,导致层级结构不够灵活。
8. 不支持自适应采样,由于层级结构不够灵活,导致它们不支持自适应采样。
9. 不支持拓扑形态学运算,由于树结构较深,它们不支持快速拓扑形态学运算。
10. 复杂度高,实现较为复杂,不利于快速实现和应用。
窄带Level Set是一种用于表示和变形复杂隐式几何的时间依赖窄带有符号距离场。其特点包括:
1. 时间依赖性:随时间变化而变形,是时间依赖的距离场。
2. 窄带性:仅包含距离零点附近较小距离范围内的数据,形成一个窄带。
3. 签名:距离场的值代表零点内外,即正负值。
4. 签名距离:值代表物体表面到零点的距离,正负值分别代表内外。
5. 表面表示:通过窄带内外的距离场值变化来表示物体表面,可以跟踪变形。
6. 数值模拟:常用于流体动画和几何建模,可以表示和传播窄带表面的时间依赖变化。
7. 优化数据结构:专为窄带Level Set设计的稀疏数据结构,如DT-Grid和H-RLE,能降低内存占用率。
8. 宽度:通常在10个voxel左右,影响内存占用率和数据结构设计。
9. 负值填充:为了节省内存,距离场外的负值距离通常使用一个统一的较大正值代替。
10. 拓扑编码:在VDB中,窄带Level Set的拓扑编码可以通过二进制掩码进行。
窄带Level Set是一种通过距离场来表示和传播隐式几何表面变化的方法,其基本原理包括以下几点:
1. 距离场表示:距离场值代表物体表面到零点的距离,零点在物体表面内部,距离场值为正;零点在物体表面外部,距离场值为负。
2. 窄带区域:距离场只包含距离零点附近较小距离范围内的数据,形成一个窄带区域,外部距离场被忽略。
3. 签名距离:窄带区域内距离场值为正,表示内部;距离场值为负,表示外部。
4. 拓扑编码:距离场值可用于表示零点内外拓扑关系,通过二进制编码实现。
5. 窄带重构:通过窄带距离场重构来跟踪表面拓扑变化,包括距离场更新和窄带重构两个步骤。
6. 距离场传播:通过距离场值的变化来传播拓扑信息,实现隐式表面的变形和传播。
7. 高效表示:距离场值变化仅发生在窄带区域,降低了内存占用率和计算量。
8. 高精度重构:采用高阶数值方法,如高阶WENO差分格式,实现高精度距离场传播和重构。
9. 拓扑依赖的稀疏数据结构:专为窄带Level Set设计的稀疏数据结构,如DT-Grid和H-RLE,可以降低内存占用率。
10. 快速算法:通过树结构加速距离场访问,实现快速随机和顺序访问。
传播隐式几何表面变化是指利用距离场来跟踪和表示隐式几何表面随时间变化的传播过程。其基本原理包括:
1. 定义距离场:通过定义距离场,表示物体表面到零点的距离,距离场值的变化可以用于表示表面拓扑的变化。
2. 窄带Level Set:利用窄带Level Set只包含距离零点附近的数据,从而降低计算量。
3. 距离场传播:利用高阶数值方法传播距离场值,以实现表面变形的高精度传播。
4. 重构窄带:通过距离场值的变化重构窄带,以获取拓扑变化信息。
5. 拓扑编码:利用二进制掩码编码距离场值,表示表面拓扑。
6. 表面传播:利用距离场值的传播来表示表面拓扑的变化,实现表面变形的传播。
7. 高效表示:距离场值的变化仅在窄带内发生,从而降低内存占用率和计算量。
8. 快速算法:利用树结构加速距离场访问,实现快速随机和顺序访问。
DT-Grid是专为窄带Level Set设计的稀疏数据结构,其基本实现原理包括以下几点:
1. 数据组织:数据按照块的顺序组织在三维空间中,每块包含若干个voxel。
2. 块索引:使用一维数组存储每个块的索引,块索引通过坐标计算得到。
3. 块编码:使用压缩行存储(CRS)编码方式,通过稀疏矩阵压缩编码每块的voxel数据。
4. 全局索引:使用全局坐标计算块索引,以访问任意voxel。
5. 数据访问:顺序访问通过遍历块索引实现,随机访问通过计算块索引实现。
6. 高效操作:插入和删除通过修改块索引和CRS编码实现,不需要重新构建数据结构。
7. 层级结构:整个结构是一个N-tree,树深度决定了数据分辨率。
8. 高效存储:数据按顺序存储,有利于顺序访问和遍历。
9. 高压缩率:使用CRS编码,可以压缩存储数据,降低内存占用率。
10. 内存占用率低:按需分配块,内存占用率随数据分辨率线性增长。
CRS编码是一种压缩行存储编码,主要用于压缩存储稀疏矩阵中的非零元素,实现高效率的存储和快速访问。
其基本原理包括以下几点:
1. 行优先存储:将稀疏矩阵中的非零元素按照行优先顺序存储在数组中。
2. 行索引和列索引:使用两个一维数组分别存储每个非零元素的行索引和列索引。
3. 元素值数组:使用一个一维数组存储所有非零元素的值。
4. 行索引和列索引的对应关系:确保行索引和列索引数组中的元素一一对应。
5. 压缩行存储:通过跳过零元素,减少内存占用。
6. 高效访问:通过行索引和列索引数组实现快速访问任意元素。
7. 非零元素个数的减少:通过压缩行存储,降低非零元素的个数。
8. 适用范围:适用于存储稀疏矩阵,实现高效存储和快速访问。
H-RLE是针对DT-Grid设计的改进型稀疏数据结构,用于窄带Level Set的表示。其基本实现原理包括以下几点:
1. 基本原理:H-RLE利用DT-Grid的层级结构,在每层引入了Run-Length Encoding(RLE)编码,以提高存储效率。
2. 层级结构:整个结构是一个N-tree,树深度决定了数据分辨率。每层代表一个分辨率层次。
3. 块存储:每个节点代表一个block,包含若干voxel。
4. RLE编码:每个节点都包含一个RLE编码的掩码,用于表示活跃voxel的分布。
5. 块索引:使用一维数组存储每个块的索引,通过坐标计算得到。
6. 块编码:使用RLE编码存储块的活跃voxel信息。
7. 全局索引:使用全局坐标计算块索引,以访问任意voxel。
8. 数据访问:顺序访问通过遍历RLE掩码实现,随机访问通过计算块索引实现。
RLE(Run-Length Encoding)编码是一种简单高效的重复值压缩编码方法,适用于表示重复值较多的数据。
其基本实现原理包括以下几点:
1. 检测重复值:在数据流中,检测连续出现的重复值。
2. 替换重复值:用重复次数和单个值来替换连续重复出现的值。
3. 解码:读取重复次数和单个值,再重复值多次,还原原始数据。
4. 编码效率:RLE编码效率与重复值出现的频率相关,重复值越多,编码效率越高。
5. 内存占用率降低:替换重复值可降低内存占用率。
6. 处理丢失数据:RLE编码可以处理数据流中的丢失数据。
7. 适用于多种数据类型:适用于多种数据类型,如字符、整数等。
稀疏体数据结构在计算机图形学中具有重要意义,原因如下:
1. 节省内存空间:稀疏体数据结构可以有效地表示稀疏的体数据,从而节省内存空间。与密集的正则体网格相比,稀疏体数据结构只需占用包含有意义的样本值的体素的内存空间,而无需占用整个密集嵌入空间。
2. 支持动态拓扑:稀疏体数据结构可以支持动态拓扑,适应体数据随时间变化,这使其在处理模拟和动画场景中的动态体数据时具有优势。
3. 提供自适应分辨率:稀疏体数据结构能够以不同分辨率表示体数据,为自适应网格采样和渲染提供了便利。
4. 加速计算:稀疏体数据结构提供了层级结构,可以作为加速数据结构,在光线追踪和体积渲染等算法中提高计算效率。
5. 节省存储空间:稀疏体数据结构可以只存储活跃体素,从而节省磁盘空间。
6. 支持随机访问:稀疏体数据结构需要支持随机访问,以满足多种应用场景的需求。
疏体数据结构提供自适应分辨率的方式主要包括以下两种:
1. 多分辨率表示:在同一数据结构中,不同深度的节点可以存储不同分辨率的体数据。比如在VDB数据结构中,每个节点可以存储不同分辨率的体数据,从而支持多分辨率表示。
2. 多层次数据结构:构建多个不同分辨率的稀疏体数据结构,形成层次结构。比如使用多个不同分辨率的八叉树来表示同一个体数据。当需要不同分辨率时,可以切换到不同分辨率的子树进行操作。
这两种方式的主要优势包括:
1. 高效采样:可以根据实际需求选择合适的分辨率进行自适应采样,避免了不必要的计算开销。
2. 高效渲染:可以针对不同分辨率的需求进行优化,提高了渲染的效率。
3. 内存占用低:由于只存储不同分辨率的数据,内存占用率较低。
4. 采样方式灵活:支持不同的采样方式,可以根据实际需求进行选择。
稀疏体数据结构作为层级结构,在光线追踪和体积渲染等算法中能够加速计算,主要归因于以下几个原因:
1. 跳过无效区域:通过层级结构,可以跳过整个无效区域,避免进行冗余计算,从而减少计算量。
2. 优化遍历:层级结构有助于优化遍历过程,提高遍历效率。
3. 快速距离判断:通过层级结构,可以快速判断光线与体数据的距离,避免进行冗余计算。
4. 层级计算:利用层级结构进行计算,可以降低复杂度,减少计算量。
5. 并行计算:层级结构有助于实现并行计算,提高计算效率。
6. 空间数据表示:层级结构有助于优化空间数据的表示,提高渲染和计算的效率。
7. 整体计算效率:层级结构有助于提高整体计算效率,加速渲染和光线追踪等算法。
8. 加速结构:稀疏体数据结构本身可以作为加速结构,利用层级结构进行加速计算。
稀疏体数据结构支持随机访问的原因主要有以下几点:
1. 层级结构:稀疏体数据结构采用层级结构,每层对应不同的分辨率,支持快速定位到需要访问的节点。
2. 快速节点定位:稀疏体数据结构中的节点可以通过计算节点坐标来快速定位,满足随机访问需求。
3. 节点直接访问:稀疏体数据结构中的节点通常采用直接访问表的方式存储,可以快速访问任意位置的体数据。
4. 高效遍历算法:稀疏体数据结构中存在高效的遍历算法,可以快速遍历节点,实现随机访问。
5. 快速数据定位:稀疏体数据结构中存在快速数据定位机制,例如通过地址偏移计算快速定位到节点的数据。
6. 节点互不重叠:稀疏体数据结构中的节点通常互不重叠,可以支持随机访问。
7. 动态数据结构:一些稀疏体数据结构是动态数据结构,可以支持随机插入和删除,满足动态场景的需求。
VDB数据结构具有以下特点:
1. 动态:支持动态拓扑和动态值,适用于时间依赖数值模拟和动画体数据。
2. 树结构:VDB的树结构中,非叶节点只存储拓扑信息,叶节点存储具体的体素值。这使得动态插入和删除体素只需要修改叶节点的拓扑信息和值,而不需要重构整个树结构。
3. 快速随机访问:VDB支持快速随机访问,通过高效的位操作计算,可以快速找到需要插入或删除的体素所在叶节点。
4. 位掩码技术:VDB使用位掩码技术来表示拓扑信息,这使得可以高效地修改拓扑信息,支持动态插入和删除体素。
5. 线程安全机制:VDB提供了线程安全机制,通过为每个线程分配独立的树,避免了竞争条件,支持并行计算。
VDB通过以下方式支持动态插入和删除体素,以改变拓扑结构:
1. 分配内存机制:VDB采用动态分配内存机制,在需要时为新的体素分配内存空间。
2. 动态值:VDB可以存储多个时间步的数值,支持时间依赖数值模拟。通过多个数值缓冲区,可以表示体素值的时间演化过程。
3. 数值积分算法支持:VDB支持数值积分算法,例如TVD-RK等,需要多个数值缓冲区,为时间依赖数值模拟提供了可能。
4. 动态拓扑重建算法支持:VDB支持动态拓扑重建算法,例如窄带重构等,为动态重构体素拓扑提供了可能。
5. 高效的随机插入和删除算法:VDB提供了高效的随机插入和删除算法,支持动态修改体素拓扑和数值。
6. 线程安全:VDB提供了线程安全机制,支持并行计算,为大规模动态模拟提供了可能。
TVD-RK(Total Variation Diminishing Runge-Kutta)是一种用于求解偏微分方程的高效数值积分方法,主要用于解决偏微分方程中的时间步进问题。
具体来说,TVD-RK通过以下步骤实现数值积分:
1. 定义一个多阶Runge-Kutta时间步进公式,例如三阶TVD-RK包括三个时间步:k1, k2, k3。
2. 在每个时间步,使用当前时刻的值和前一个时刻的值计算每个时间步的中间值。
3. 使用Runge-Kutta公式计算每个时间步的最终值,通常包括k1、k2、k3三个值的线性组合。
4. 通过设置CFL条件来控制时间步长,以确保数值稳定。
Runge-Kutta是一种常用的求解偏微分方程数值积分方法。它通过以下步骤实现:
1. 定义一个多阶时间步进公式,例如二阶、三阶或四阶的Runge-Kutta公式。
2. 在每个时间步中,使用当前时刻的值和前一个时刻的值计算中间值,例如二阶Runge-Kutta的中间值为:
k1 = f(x, t)
k2 = f(x + k1/2, t + dt/2)
3. 使用Runge-Kutta公式计算每个时间步的最终值,例如二阶Runge-Kutta的最终值为:
x(t+dt) = x(t) + dt * (k1 + k2)/2
4. 设置CFL条件,控制时间步长,以确保数值稳定。
VDB采用动态分配内存机制,在需要时为新的体素分配内存空间。具体实现方式如下:
1. 树结构组织:VDB采用树结构组织体素,不同层次的节点存储不同粒度的体素信息。叶节点负责存储具体体素值,非叶节点负责存储叶节点的拓扑信息。
2. 动态分配机制:当需要插入新的体素时,VDB会检查该体素所属的叶节点。如果该叶节点已满,VDB会自动创建一个新的叶节点,并分配内存空间,然后在该新叶节点中插入新体素。
3. 内存释放:当需要删除一个体素时,VDB会检查该体素所属的叶节点。如果删除后该叶节点变为空,VDB会释放该叶节点的内存空间。
4. 动态分配内存大小:VDB会根据实际需求,动态调整每个叶节点的内存大小,避免浪费内存空间。
5. 树结构调整:在动态插入和删除过程中,VDB会自动调整树结构,以保证树的平衡,避免影响性能。
VDB会根据实际需求,动态调整每个叶节点的内存大小,以避免浪费内存空间。具体实现方式如下:
1. 支持多数值缓冲区:VDB支持每个叶节点拥有多个数值缓冲区,以表示体素值的时间演化过程。不同数值缓冲区可以具有不同的内存大小,以适应不同需求。
2. 灵活配置节点内存:VDB允许配置每个叶节点的内存大小,通过设置叶节点的模板参数,可以灵活配置每个叶节点的内存大小。
3. 根据需求动态分配:在插入新的体素时,VDB会根据当前叶节点的内存占用情况,动态决定是否需要为该叶节点分配更多的内存空间。若当前内存不足,VDB会自动增加该叶节点的内存大小。
4. 释放未使用的内存:在删除体素时,VDB会检查叶节点的内存占用情况,若当前内存过大,VDB会释放部分未使用的内存,以降低内存占用。
5. 合并释放内存:当某棵树中某个叶节点的所有数值缓冲区都为空时,VDB会释放该叶节点的内存,并将其合并到相邻节点。
VDB支持每个叶节点拥有多个数值缓冲区,以表示体素值的时间演化过程。不同数值缓冲区可以具有不同的内存大小,以适应不同需求。具体实现方式如下:
1. 配置缓冲区数量:在VDB的数据结构定义中,每个叶节点可以配置多个数值缓冲区,以支持多时间步的数值。
2. 内存大小分配:不同数值缓冲区可以具有不同的内存大小,以满足不同的需求。例如,对于高精度数值积分,可能需要更大的数值缓冲区;而对于快速预览,较小的数值缓冲区即可。
3. 动态内存分配:VDB会根据需要动态地为每个数值缓冲区分配内存空间,避免内存浪费。
4. 支持多线程:多线程环境下,每个线程可以访问不同的数值缓冲区,以实现并行数值模拟。
5. 切换缓冲区:在数值模拟过程中,VDB可以根据需要,动态切换不同数值缓冲区之间的读写,以实现不同时间步的数值模拟。
对于稀疏体数据结构,数值缓冲区通常用于存储不同时间点的体数据,以支持动态模拟。不同数值缓冲区可以具有不同的内存大小,以满足不同的需求。例如:
1. 高精度数值积分:对于高精度数值积分,通常需要存储多个时间点的体数据,因此需要更大的数值缓冲区,以支持更长的历史数据。
2. 快速预览:快速预览时,通常只需要存储最近的时间点数据,因此可以使用较小的数值缓冲区,以节省内存。
3. 动画渲染:动画渲染需要存储多个关键帧的体数据,因此数值缓冲区的大小需要与关键帧的数量相匹配。
4. 流体模拟:流体模拟可能需要存储不同时间步长的体数据,数值缓冲区的大小需要与时间步长相匹配。
5. 并行模拟:在并行模拟中,数值缓冲区的大小需要与每个线程的工作量相匹配。
在VDB的数据结构定义中,每个叶节点可以配置多个数值缓冲区,以支持多时间步的数值。具体实现方式如下:
1. 定义叶节点类模板:VDB的叶节点类模板中定义了多个数值缓冲区,每个数值缓冲区都由一个成员变量数组mLeafDAT来表示。
2. 配置缓冲区数量:通过叶节点类的模板参数,可以配置每个叶节点拥有的数值缓冲区数量,默认情况下为1个。
3. 动态内存分配:VDB在需要为新的数值缓冲区分配内存空间时,会动态分配一个大小为叶节点尺寸sSize的缓冲区,以满足需求。
4. 访问控制:VDB提供了访问控制方法,可以控制每个数值缓冲区的读写,以确保正确的访问顺序。
5. 状态标识:VDB使用mFlags来标识每个数值缓冲区的状态,例如是否在内存中、是否启用等,以支持多时间步的数值。
6. 支持多线程:VDB的数值缓冲区访问控制方法能够确保多线程环境下的正确性。
VDB支持多线程主要通过以下两种方式实现:
1. 分配单独的网格:将VDB网格分配给不同的线程,线程在各自的网格上进行操作。这样可以避免不同线程之间的同步问题。
2. 动态合并网格:在多线程操作完成后,可以通过网格合并将多个线程的结果合并成一个网格。例如在扫描转换或粒子 rasterization 等操作中,每个线程完成扫描转换后,可以将其网格与其他线程的网格进行合并。
VDB使用mFlags来标识每个数值缓冲区的状态,例如是否在内存中、是否启用等,以支持多时间步的数值。具体实现方式如下:
1. mFlags定义:mFlags是一个64位无符号整数,用于编码每个数值缓冲区的状态信息。
2. 位表示:通过mFlags的不同位来表示每个数值缓冲区的状态,例如:
- 位0-1表示数值缓冲区数量
- 位2表示数值缓冲区是否被压缩
- 位3表示数值缓冲区是否启用
- 位4-35表示数值缓冲区的内存偏移量
3. 状态读取:通过读取mFlags的值,可以快速判断每个数值缓冲区的状态,如数量、压缩状态、启用状态等。
4. 状态设置:通过修改mFlags的值,可以设置每个数值缓冲区的状态,如启用、禁用等。
5. 线程安全:VDB提供了线程安全的机制,以确保多线程环境下对mFlags的并发访问是安全的。
窄带重构(Narrow-band Rebuild)是Level Set方法中一个关键步骤,用于更新窄带中网格点的拓扑信息。
具体来说,窄带重构的步骤如下:
1. 窄带膨胀:根据Level Set方程的数值解,对当前窄带进行膨胀,增加额外的网格点。
2. 归一化:使用Eikonal方程对膨胀后的窄带进行归一化,以确保Level Set函数满足正确的距离约束。
3. 裁剪:根据窄带宽度,裁剪掉距离窄带中心较远的网格点。
窄带膨胀(Narrow-band Dilation)是Level Set方法中的一个重要步骤,用于更新窄带的拓扑信息。具体来说,窄带膨胀的步骤如下:
1. 使用当前时刻的Level Set函数值和窄带宽度,计算膨胀后的新窄带。
2. 对于新窄带中的每个网格点,如果当前时刻的Level Set函数值在该点附近变化不大,则该点也属于窄带。
3. 否则,根据窄带宽度,选择距离该点最近的窄带内的网格点作为该点的新值。
无限域:理论上可表示无限大的索引空间,支持负坐标。
1. 理论上,稀疏数据结构如VDB可以表示无限大的三维索引空间,支持负坐标,这是其作为稀疏数据结构的一个重要特点。具体实现方法如下:
2. 基于二进制编码:VDB的坐标是基于二进制编码的,因此可以表示负坐标,支持无限大的坐标范围。
3. 动态分配内存:VDB支持动态分配内存,根据需要可以分配新的坐标空间,因此理论上可以表示无限大的坐标范围。
4. 树结构组织:VDB采用树结构组织,通过树深度可以表示更深的坐标范围,同时树节点可以根据需要动态分配,因此可以表示更大的坐标范围。
5. 无限域表示:VDB的树结构在理论上可以一直延伸下去,因此可以表示无限大的坐标范围。
6. 位操作运算:VDB利用位操作运算来高效地处理坐标,避免了普通运算的精度损失,因此可以表示更大的坐标范围。
7. 支持负坐标:VDB的坐标表示方式支持负坐标,不会出现坐标值越界的情况,因此可以表示更大的坐标范围。
稀疏数据结构通过外存流式传输来降低内存占用的方法主要包括以下步骤:
1. 仅存储稀疏拓扑信息:稀疏数据结构只存储稀疏拓扑信息,例如体素的活性状态,而不存储具体的数值,以节省内存。
2. 延迟加载具体数值:当需要具体数值时,通过索引从外存中加载,这样可以避免大量数据始终驻留在内存中。
3. 优化加载策略:通过缓存、预加载等方式优化数据的加载策略,减少外存I/O次数,提高访问速度。
4. 动态调整内存大小:根据需要,动态调整内存中的稀疏数据大小,以适应不同场景的内存限制。
5. 优先加载频繁访问的数据:优先加载经常被访问的数据,提高访问速度。
6. 使用流式传输接口:通过流式传输接口,如HDF5、NetCDF等,来保存和加载稀疏数据,提高I/O效率。
7. 支持部分修改:通过修改内存中的稀疏拓扑信息,来修改外存中的数据,避免完全重新生成稀疏数据。
HDF5是一种用于存储和交换科学数据的文件格式。它主要由以下部分组成:
1. 数据集:用于存储一维或多维数组数据,支持任意大小的数据集。
2. 组:用于组织和管理数据集,可以包含多个子组。
3. 属性:用于描述数据集或组的基本信息,包括数据类型、维度、数据精度等。
4. 数据类型:包括整数、浮点数、字符串、数组等基本数据类型,以及自定义数据类型。
5. 数据子集:支持从大数据集中提取部分数据子集进行操作。
HDF5的主要特点包括:
1. 数据可重用:支持在同一文件中多次打开和关闭数据集,避免重复读取和写入数据。
2. 支持并行操作:允许同时访问多个数据集,提高并行计算效率。
3. 数据压缩:支持多种数据压缩算法,减小数据存储空间。
4. 数据安全性:提供数据加密和完整性校验功能。
HDF5是科学计算领域重要的数据格式之一,在生物信息学、气象学、地震学等领域有广泛应用。
NetCDF(网络通用数据格式)是一种用于存储和交换科学数据的文件格式,主要用于地球系统科学领域。NetCDF格式具有以下特点:
1. 维度和坐标:可以存储多维数组数据,并定义维度和坐标轴信息。
2. 数据类型:支持整数、浮点数、字符串等基本数据类型,以及定义复杂数据类型。
3. 数据子集:支持提取数据子集进行操作。
4. 元数据:可以存储数据的基本信息,如数据单位、数据精度、数据说明等。
5. 数据压缩:支持多种数据压缩算法,减小数据存储空间。
6. 数据安全:提供数据加密和完整性校验功能。
NetCDF格式的主要特点包括:
1. 通用性:适用于存储不同类型的数据,方便数据交换和集成。
2. 易于使用:提供了简洁的API接口,便于读取和写入数据。
3. 并行性:支持并行操作,提高并行计算效率。
4. 数据可重用性:支持在同一文件中多次打开和关闭数据集,避免重复读取和写入数据。
NetCDF格式是地球系统科学领域重要的数据格式之一,在气象学、海洋学、生态学等领域有广泛应用。
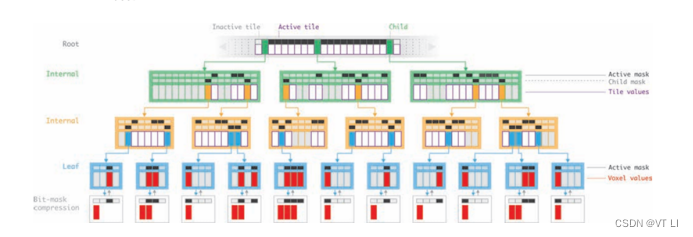
VDB数据结构是基于B+树设计的一种稀疏体数据结构,其中包含以下基础概念:
1. 块(LeafNode):最底层的块,将索引空间分割成子域,每个块包含2^w个体素。
2. 内节点(InternalNode):中间层节点,连接根节点和叶节点,也包含子节点和体素值。
3. 根节点(RootNode):最顶层节点,是稀疏的动态节点,可容纳大量子节点。
4. 拓扑:使用位掩码编码块中的活跃体素和内节点中的子节点。
5. 值:在叶节点和内节点中存储,对应于体素值或子节点的值。
6. 活跃/非活跃:区分块中重要的和不重要的体素。
7. 分层:基于B+树的层级结构,提供加速结构。
8. 位运算:使用位运算进行快速拓扑编码和解码。
9. 自适应采样:支持不同分辨率值的存储。
这些基础概念构建了VDB数据结构,使其具有动态、内存高效、快速访问等优势。
VDB数据结构中的叶节点(LeafNode)具有以下特征:
维度固定:叶节点的维度在编译时固定,即每个维度上有2^w个体素,其中w为分支因子。
编码拓扑:叶节点使用位掩码mValueMask来编码活跃体素的拓扑,其大小固定为节点大小。
存储值:叶节点使用直接访问表mLeafDAT来存储体素值,其大小可以根据需要动态调整。
支持时间缓冲:mLeafDAT可以包含多个时间缓冲区,以支持时间积分。
支持外存:通过偏移量可以支持外存。
数据压缩:支持通过拓扑进行数据压缩,只存储活跃体素的值。
位量化:支持通过位量化来减小内存占用。
线程安全:支持线程安全。
访问高效:随机访问时间复杂度为O(1)。
易于实现:基于位运算,实现简单。
叶节点作为VDB数据结构的基础单元,通过灵活的编码和存储方式,支持动态拓扑、高效访问等需求。
位量化(Bit Quantization)是将数据从高精度转换到低精度,通常用于减小数据存储空间和计算复杂度。
位量化通常采用以下步骤实现:
1. 确定量化精度:根据数据特性,选择合适的量化位数,如8位、16位等。
2. 重新映射:将原始数据按比例映射到新的量化值范围,然后四舍五入到最接近的量化值。
3. 编码:使用位运算将量化值编码为二进制位流。
4. 解码:在需要使用数据时,将位流解码回量化值,然后按比例映射回原始数据。
位量化可能会引入量化误差,但在很多情况下可以满足需求,同时有效减小数据量和计算量。此外,位量化算法简单高效,易于实现。常见的位量化方法包括线性量化、非线性量化、均匀量化等。
量化位数(Quantization Bit Count)是决定数据量化精度的参数。
它有两个主要用途:
1. 决定数据表示范围:量化位数决定数据可以表示的最大值和最小值。例如,8位量化可以表示0-255的整数,而16位量化可以表示0-65535的整数。
2. 决定量化误差:量化位数决定数据的表示精度。位数越多,表示精度越高,但数据存储和计算量也越大。位数越少,表示精度越低,但数据量更小,计算也更简单。
通常,实现量化位数的方法如下:
1. 确定数据的最大值和最小值。
2. 计算量化间隔:量化间隔= (最大值-最小值)/(2的量化位数-1)。
3. 对每个数据值进行四舍五入,映射到最接近的量化值上。
4. 使用位运算将量化值编码为二进制位流。
5. 在需要使用数据时,将位流解码回量化值,然后按比例映射回原始数据。
通过合理选择量化位数,可以在满足精度要求的前提下,最大限度地减小数据存储和计算量。
VDB数据结构中的内节点(InternalNode)具有以下特征:
维度固定:内节点的维度在编译时固定,即每个维度上有2^w个子节点,其中w为分支因子。
编码拓扑:内节点使用位掩码mChildMask来编码子节点的拓扑,其大小固定为节点大小。
存储值:内节点使用直接访问表mInternalDAT来存储子节点的指针和体素值。
支持多级:内节点可包含下一级内节点或叶节点。
固定深度:内节点的深度固定,每个内节点都位于固定的深度。
位运算:通过位运算进行快速拓扑编码和解码。
访问高效:随机访问时间复杂度为O(1)。
易于实现:基于位运算,实现简单。
内节点作为VDB数据结构的中间层,通过支持多级和高效访问,实现了加速结构和层级化结构。
VDB数据结构中的根节点(RootNode)具有以下特征:
稀疏动态:根节点是稀疏的动态节点,可以根据需要动态调整大小。
子节点编码:使用哈希表mRootMap来编码子节点的拓扑,存储子节点指针和体素值。
动态可扩展:mRootMap的大小可以根据需要动态扩展。
访问加速:支持访问加速器(Accessor),可以缓存已访问节点的信息,提高后续访问的性能。
支持无限域:理论上可以表示无限大的索引空间。
常量时间复杂度:随机访问时间复杂度为O(1)。
位运算:通过位运算进行快速拓扑编码和解码。
易于实现:基于哈希表和位运算,实现简单。
根节点作为VDB数据结构的顶层节点,通过动态调整和访问加速,实现了无限域表示和快速访问。
构建VDB数据结构的主要步骤如下:
定义节点类:定义RootNode、InternalNode和LeafNode三个节点类,分别实现根节点、内节点和叶节点。
分配层级关系:根据需要设置节点类之间的层级关系,通常为根节点、内节点、叶节点三级。
拓扑编码:使用位运算为每个节点编码拓扑,例如使用位掩码mValueMask编码叶节点中的活跃体素。
存储值:在叶节点和内节点中存储体素值或子节点值,例如使用直接访问表mLeafDAT和mInternalDAT。
初始化根节点:使用哈希表初始化根节点的子节点拓扑。
构建树:自下而上构建树,首先构建叶节点,然后构建内节点,最后构建根节点。
分配内存:为每个节点分配内存空间,并初始化拓扑和值。
加载体素值:按需加载叶节点中的体素值。
插入/删除节点:使用随机插入/删除算法,按需插入或删除节点。
优化:对树结构进行优化,如剪枝、重建窄带等。
构建VDB数据结构需要合理设置节点类和拓扑编码,并按需分配内存,以实现动态、内存高效的稀疏体数据结构。
VDB数据结构支持高效的随机访问,其实现方式如下:
从根节点开始:使用哈希表mRootMap中的根键rootKey查询根节点,如果找到子节点,则继续遍历;如果找到体素值,则返回。
逐层遍历:通过计算偏移量,逐层遍历内节点和叶节点,直到找到所需体素值。
利用访问器:利用访问器缓存已访问的节点信息,以加速后续访问。
支持负坐标:使用位运算支持负坐标,并利用双补码表示负数。
访问复杂度:随机访问的时间复杂度为O(1)。
VDB的随机访问算法充分利用了数据结构的特点,如层级结构、位运算和访问器缓存,实现了高效的随机访问。
VDB随机访问算法可以通过以下方式进一步改进:
1. 利用访问器:利用访问器缓存已访问的节点信息,以加速后续访问。
2. 支持负坐标:使用位运算支持负坐标,并利用双补码表示负数。
3. 并行随机访问:利用多核并行加速随机访问,通过线程安全的数据结构实现。
4. 利用向量运算:利用SIMD指令集加速位运算和数值运算。
5. 使用优化算法:使用更快的数据结构实现,如基于位运算的哈希表。
6. 内存管理:采用线程安全的内存池,避免内存碎片化。
7. 外存支持:支持外存访问,通过偏移量实现。
8. 动态调整树结构:根据访问模式动态调整树结构,如增加缓存层、调整分支因子等。
9. 压缩和量化:支持动态数据压缩和量化,以减少内存占用。
10. 访问加速器:支持访问加速器,以提高后续访问的性能。
双补码(double complement)表示负数的方法如下:
1. 对数值取绝对值,然后加上一个负号。
2. 将该负数视为无符号数,求出该无符号数的补码。
3. 再对该补码取反加1,得到双补码。
具体步骤如下:
1. 对于一个负数,首先求出它的绝对值。
2. 将绝对值视为一个无符号数,求出它的补码。对于无符号数x,它的补码是~(x-1)。
3. 对无符号补码取反加1,得到双补码。取反加1后得到的是有符号数,需要再次求出它的绝对值。
例如,假设x=-5,取绝对值后为5,求无符号补码为~(5-1)=~4,取反加1得到双补码为-5。
对于负数的双补码,可以直接进行加法和减法运算,最后结果仍为负数。这种表示方法解决了负数的加减法运算问题,是计算机中表示负数的一种常见方法。
VDB数据结构支持高效的顺序访问,其实现方式如下:
1. 遍历位掩码:通过遍历每个节点的位掩码mValueMask和mChildMask,逐层顺序访问体素值和子节点。
2. 利用直接访问表:利用叶节点的直接访问表mLeafDAT和内节点的直接访问表mInternalDAT,以快速定位下一个活跃值或子节点。
3. 计算偏移量:利用位运算计算偏移量,以快速访问下一个活跃值或子节点。
4. 顺序迭代器:利用顺序迭代器遍历位掩码,以实现顺序访问。
5. 时间复杂度:顺序访问的时间复杂度为O(1)。
VDB的顺序访问算法充分利用了数据结构的特点,如层级结构、位运算和直接访问表,实现了高效的顺序访问。
VDB数据结构支持高效的网格访问,其实现方式如下:
1. 计算偏移量:利用位运算计算偏移量,以快速访问网格点。
2. 遍历顺序迭代器:遍历顺序迭代器,以访问网格点的邻居。
3. 时间复杂度:网格访问的时间复杂度为O(1)。
4. 支持流场:支持流场的网格访问,实现水平网格到结构化网格的转换。
5. 支持任意stencil:支持任意stencil的网格访问,可以自由选择stencil大小和形状。
VDB的网格访问算法充分利用了数据结构的特点,如层级结构、位运算和顺序迭代器,实现了高效的网格访问。
在流体模拟中,我们经常需要访问水平网格和结构化网格中的流体变量。这两种网格的存储方式不同,因此需要进行转换。
具体来说,水平网格存储了流体变量的各个分量(如u、v、w)在网格点上的值,而结构化网格则是将这些分量存放在网格单元的中心点上。
为了实现水平网格到结构化网格的转换,我们需要执行以下步骤:
1. 根据水平网格的存储方式,获取各个流体分量在网格点上的值。
2. 对每个流体分量,采用插值方法将其从网格点插值到网格单元中心点。常见的插值方法包括线性插值、双线性插值和三次样条插值。
3. 在结构化网格中,根据网格单元中心点的坐标,确定每个网格单元所属的网格点。
4. 将插值得到的流体分量值存入结构化网格中,对应每个网格点的流体分量。
通过这种转换,我们可以在结构化网格中访问水平网格中的流体变量,同时也可以在水平网格中访问结构化网格中的流体变量,从而实现两种网格之间的高效数据访问和计算。这种转换是流体模拟中一个重要的技术。
在网格访问中,stencil(模板)定义了需要访问的相邻网格点的集合,是许多数值算法的基础。支持任意stencil的网格访问需要实现以下功能:
1. 灵活选择stencil大小和形状:根据具体算法需求,可以自由选择stencil的大小(例如3x3x3, 5x5x5)和形状(例如对称、非对称)。
2. 高效访问stencil内的数据:对于每个stencil中心点,需要高效访问其stencil内的网格点数据。常见的实现方式包括使用数组索引访问和迭代器遍历。
3. 支持不同类型的stencil:除了常见的三维stencil外,还需要支持一维和二维stencil,以满足不同算法的需求。
4. stencil重叠区域的处理:对于多个stencil中心点,可能存在stencil重叠的区域,需要高效地避免重复访问。
5. 线程安全性:对于多线程环境,需要确保stencil访问的线程安全性。
实现任意stencil的网格访问,需要根据具体的应用场景和算法需求,灵活设计stencil访问函数,并优化数据访问路径。
VDB支持高效的拓扑形态操作,包括膨胀、腐蚀、重建等,其实现方式如下:
1. 位掩码编码拓扑:使用位掩码mValueMask和mChildMask来编码体素值拓扑。
2. 遍历位掩码:通过遍历位掩码,进行拓扑膨胀、腐蚀、重建等操作。
3. 计算偏移量:利用位运算计算偏移量,以快速更新位掩码。
VDB的拓扑形态操作算法充分利用了数据结构的特点,如位运算和位掩码编码,实现了高效的拓扑形态操作。
在体数据中,拓扑操作如膨胀、腐蚀和重建是指对体素进行添加或删除,以改变体数据的空间拓扑结构。
具体实现步骤如下:
1. 确定膨胀或腐蚀的大小:定义要膨胀或腐蚀的体素数量。
2. 遍历体素:遍历整个体素空间,检测需要膨胀或腐蚀的体素。
3. 执行膨胀或腐蚀操作:对检测到的体素执行膨胀或腐蚀操作,包括修改体素状态、增加或删除体素。
4. 重建体数据:根据新的体素状态,重新构建体数据的网格拓扑结构。
5. 更新计算:重新进行相关计算,如流体模拟、物理碰撞检测等,以更新体数据的物理状态。
VDB数据结构支持高效的数值模拟,其实现方式如下:
1. 更新体素值:利用顺序迭代器更新体素值,实现高效数值模拟。
2. 重建窄带:通过膨胀重建窄带,实现窄带重建。
3. 删除多余体素:通过顺序迭代器删除多余的体素,实现窄带修剪。
VDB数据结构支持高效的分层构造实体几何,其实现方式如下:
1. 利用树结构:利用VDB的树结构进行加速,只处理相交的节点。
2. 层级布尔运算:进行层级布尔运算,实现节点合并、相交、差分等操作。
VDB数据结构支持高效的分层布尔拓扑操作,其实现方式如下:
1. 利用位掩码编码拓扑:使用位掩码mValueMask来编码体素值拓扑。
2. 遍历位掩码:通过遍历位掩码,进行拓扑布尔运算,如并、交、差等操作。
VDB数据结构支持高效的网格到水平集扫描转换,其实现方式如下:
1. 利用层级结构:利用VDB的层级结构,将网格划分为多个块进行扫描转换。
2. 直接应用扫描转换器:在LeafNode层级直接应用扫描转换器,避免使用辅助数据结构。
3. 随机插入体素值:支持随机插入体素值,避免了排序,提高了转换效率。
4. 并行计算:支持并行计算,通过线程安全的数据结构实现。
VDB数据结构支持高效的分层泛洪填充,其实现方式如下:
1. 利用层级结构:利用VDB的层级结构,进行自下而上的泛洪填充。
2. 递归传递边界值:通过递归传递边界值,实现分层泛洪填充。
分层泛洪填充(Hierarchical Flood Fill)是一种高效处理体数据的算法。其基本思想是将体数据空间划分为层次结构,并从底层向上层进行泛洪填充,以处理整个体数据。
具体实现步骤如下:
1. 构建层次结构:将体数据空间划分为多个层级,每个层级包含多个体素块。
2. 从底层向上层泛洪:从底层开始,逐层向上层进行泛洪填充,处理每个层级上的体素块。
3. 处理相邻层级:处理相邻层级时,只处理相邻体素块,避免重复访问和计算。
4. 维护边界值:维护每个层级上的边界值,以确保上层获取到正确的填充结果。
5. 构建加速结构:利用层次结构构建加速结构,以提高后续的访问和处理效率。
泛洪填充(Flood Fill)是一种在网格中填充区域的算法。它从给定的起始点开始,以该点为种子,按照一定方向,逐个填充相邻网格点,直到整个区域被填满。
具体实现步骤如下:
1. 确定种子点:选择要填充区域的起始点作为种子点。
2. 维护待处理队列:使用队列来维护待处理的相邻网格点。
3. 填充相邻点:从种子点开始,按一定方向遍历相邻网格点,将可填充的相邻点加入待处理队列。
4. 弹出待处理点:从队列中弹出待处理点,进行填充。
5. 迭代执行:重复步骤3-4,直到所有可填充区域被填满。
VDB数据结构支持加速光线追踪,其实现方式如下:
1. 利用树结构:利用VDB的树结构进行加速,避免遍历无效区域。
2. 多层次光线跳跃:实现多层次光线跳跃,通过递归计算光线与节点的交点。
3. 加速空洞区域计算:加速空洞区域的计算,避免冗余光线遍历。
4. 支持任意拓扑:支持任意拓扑的光线追踪,不受数据结构限制。
尽管VDB在动态稀疏体数据结构方面取得了重要进展,但仍存在一些局限性:
1. 内存占用:对于窄带水平集应用,VDB的内存占用略大于专门为此优化的数据结构,如DT-Grid。
2. 多分辨率采样支持:VDB不支持不同分辨率采样值的重叠,因此不太适合多分辨率应用,需要与octree等其他数据结构配合使用。
3. 压缩效率:VDB的压缩效率没有针对数据拓扑进行优化,通用压缩算法效果不如针对拓扑的编码。
4. 并行性支持:VDB在并行环境下的随机插入删除操作线程不安全,需要特殊处理。
5. 重建算法效率:VDB重建算法相对复杂,重建效率不如专门为此优化的数据结构。
6. 多体素值处理:VDB在处理非闭合水平集时,需要额外的标志位来表示内部/外部,不如DT-Grid等自然支持。
7. 插入删除速度:VDB的插入删除速度较慢,因为需要动态构建节点,不如静态分配的树结构快。
VDB已经在DreamWorks Animation的一些电影制作中得到应用,具体包括:
1. 《靴猫》(Puss in Boots):用于生成高分辨率动画云层。
2. 《守护者联盟》(Rise of the Guardians):同样用于生成高分辨率动画云层。
3. 《恐龙战队》(The Mummy: Tomb of the Dragon Emperor):用于实现快速3D碎裂效果。
4. 《加勒比海盗3》(Pirates of the Caribbean 3):用于生成粒子系统表面。
5. 《2012》:用于模拟破坏洛杉矶的特效。
6. 《如何训练你的龙》(How to Train Your Dragon):用于生成高分辨率水平集表面。
7. 《变形金刚3》(Transformers 3):用于模拟汽车碰撞。
8. 《功夫熊猫》(Kung Fu Panda):用于生成水面特效。
此外,VDB也在扫描转换、泛洪填充、光线追踪等方面得到应用,可以说VDB已经在电影特效和动画制作领域得到广泛应用。